#include <smacc_client_behavior_base.hpp>
Public Member Functions | |
| ISmaccClientBehavior () | |
| virtual | ~ISmaccClientBehavior () |
| ISmaccStateMachine * | getStateMachine () |
| std::string | getName () const |
| template<typename SmaccClientType > | |
| void | requiresClient (SmaccClientType *&storage) |
| template<typename SmaccComponentType > | |
| void | requiresComponent (SmaccComponentType *&storage, bool throwExceptionIfNotExist) |
| template<typename SmaccComponentType > | |
| void | requiresComponent (SmaccComponentType *&storage, ComponentRequirement requirementType=ComponentRequirement::SOFT) |
| virtual void | onEntry () |
| virtual void | onExit () |
| virtual void | executeOnEntry () |
| virtual void | executeOnExit () |
Protected Member Functions | |
| virtual void | runtimeConfigure () |
| template<typename EventType > | |
| void | postEvent (const EventType &ev) |
| template<typename EventType > | |
| void | postEvent () |
| ISmaccState * | getCurrentState () |
| virtual void | dispose () |
| virtual rclcpp::Node::SharedPtr | getNode () const |
| virtual rclcpp::Logger | getLogger () const |
Private Member Functions | |
| template<typename TOrthogonal , typename TSourceObject > | |
| void | onOrthogonalAllocation () |
| template<typename TOrthogonal , typename TSourceObject > | |
| void | onStateOrthogonalAllocation () |
Private Attributes | |
| ISmaccStateMachine * | stateMachine_ |
| ISmaccState * | currentState |
| smacc2::ISmaccOrthogonal * | currentOrthogonal |
Friends | |
| class | ISmaccState |
| class | ISmaccOrthogonal |
| class | ISmaccAsynchronousClientBehavior |
Detailed Description
Definition at line 30 of file smacc_client_behavior_base.hpp.
Constructor & Destructor Documentation
◆ ISmaccClientBehavior()
| smacc2::ISmaccClientBehavior::ISmaccClientBehavior | ( | ) |
Definition at line 25 of file smacc_client_behavior_base.cpp.
References currentState, and stateMachine_.
◆ ~ISmaccClientBehavior()
|
virtual |
Definition at line 31 of file smacc_client_behavior_base.cpp.
References getLogger(), and getName().

Member Function Documentation
◆ dispose()
|
protectedvirtual |
Reimplemented in smacc2::SmaccAsyncClientBehavior.
Definition at line 79 of file smacc_client_behavior_base.cpp.
◆ executeOnEntry()
|
virtual |
Reimplemented in smacc2::SmaccAsyncClientBehavior.
Definition at line 65 of file smacc_client_behavior_base.cpp.
References getLogger(), getName(), and onEntry().
◆ executeOnExit()
|
virtual |
Reimplemented in smacc2::SmaccAsyncClientBehavior.
Definition at line 72 of file smacc_client_behavior_base.cpp.
References getLogger(), getName(), and onExit().
◆ getCurrentState()
|
inlineprotected |
Definition at line 64 of file smacc_client_behavior_impl.hpp.
References currentState.
Referenced by cl_nav2z::CbAbsoluteRotate::onEntry(), cl_nav2z::CbNavigateForward::onEntry(), cl_nav2z::CbNavigateGlobalPosition::onEntry(), cl_nav2z::CbRotate::onEntry(), and smacc2::client_behaviors::CbSequence::then().

◆ getLogger()
|
protectedvirtual |
Definition at line 45 of file smacc_client_behavior_base.cpp.
References getNode().
Referenced by cl_nav2z::CbNavigateBackwards::CbNavigateBackwards(), cl_moveit2z::CbCircularPivotMotion::computeCurrentEndEffectorPoseRelativeToPivot(), cl_moveit2z::CbMoveEndEffectorTrajectory::computeJointSpaceTrajectory(), smacc2::SmaccAsyncClientBehavior::dispose(), cl_nav2z::CbNavigateGlobalPosition::execute(), cl_moveit2z::CbMoveEndEffectorTrajectory::executeJointSpaceTrajectory(), executeOnEntry(), smacc2::SmaccAsyncClientBehavior::executeOnEntry(), executeOnExit(), smacc2::SmaccAsyncClientBehavior::executeOnExit(), cl_moveit2z::CbCircularPivotMotion::generateTrajectory(), cl_moveit2z::CbCircularPouringMotion::generateTrajectory(), cl_moveit2z::CbMoveCartesianRelative2::generateTrajectory(), cl_moveit2z::CbMoveEndEffectorTrajectory::getCurrentEndEffectorPose(), cl_moveit2z::CbMoveEndEffectorTrajectory::initializeROS(), cl_nav2z::CbNav2ZClientBehaviorBase::isOwnActionResponse(), cl_moveit2z::CbMoveKnownState::loadJointStatesFromFile(), cl_moveit2z::CbMoveJoints::moveJoints(), cl_moveit2z::CbMoveEndEffectorRelative::moveRelative(), cl_moveit2z::CbMoveCartesianRelative::moveRelativeCartesian(), cl_moveit2z::CbMoveEndEffector::moveToAbsolutePose(), cl_moveit2z::CbAttachObject::onEntry(), cl_moveit2z::CbDetachObject::onEntry(), cl_moveit2z::CbEndEffectorRotate::onEntry(), cl_moveit2z::CbMoveEndEffector::onEntry(), cl_moveit2z::CbMoveEndEffectorRelative::onEntry(), cl_moveit2z::CbMoveEndEffectorTrajectory::onEntry(), cl_moveit2z::CbMoveLastTrajectoryInitialState::onEntry(), cl_moveit2z::CbUndoLastTrajectory::onEntry(), cl_multirole_sensor::CbDefaultMultiRoleSensorBehavior< ClientType >::onEntry(), cl_nav2z::CbAbsoluteRotate::onEntry(), cl_nav2z::CbActiveStop::onEntry(), cl_nav2z::CbLoadWaypointsFile::onEntry(), cl_nav2z::CbNavigateBackwards::onEntry(), cl_nav2z::CbNavigateForward::onEntry(), cl_nav2z::CbNavigateGlobalPosition::onEntry(), cl_nav2z::CbNavigateNextWaypoint::onEntry(), cl_nav2z::CbNavigateNextWaypointFree::onEntry(), cl_nav2z::CbPauseSlam::onEntry(), cl_nav2z::CbPositionControlFreeSpace::onEntry(), cl_nav2z::CbPureSpinning::onEntry(), cl_nav2z::CbResumeSlam::onEntry(), cl_nav2z::CbRotate::onEntry(), cl_nav2z::CbSpiralMotion::onEntry(), cl_nav2z::CbTrackPathOdometry::onEntry(), cl_nav2z::CbTrackPathSLAM::onEntry(), cl_nav2z::CbUndoPathBackwards::onEntry(), cl_nav2z::CbWaitNav2Nodes::onEntry(), cl_nav2z::CbWaitPose::onEntry(), cl_nav2z::CbWaitTransform::onEntry(), smacc2::client_behaviors::CbRosLaunch2::onEntry(), smacc2::client_behaviors::CbRosLaunch::onEntry(), smacc2::client_behaviors::CbSequence::onEntry(), smacc2::client_behaviors::CbServiceCall< ServiceType >::onEntry(), smacc2::client_behaviors::CbWaitActionServer2< ActionT >::onEntry(), smacc2::client_behaviors::CbWaitActionServer::onEntry(), smacc2::client_behaviors::CbWaitNode::onEntry(), smacc2::client_behaviors::CbWaitTopic::onEntry(), smacc2::client_behaviors::CbWaitTopicMessage< TMessage >::onEntry(), smacc2::SmaccClientBehavior::onEntry(), cl_moveit2z::CbMoveEndEffectorTrajectory::onExit(), cl_nav2z::CbNavigateGlobalPosition::onExit(), cl_nav2z::CbUndoPathBackwards::onExit(), smacc2::SmaccClientBehavior::onExit(), cl_nav2z::CbWaitNav2Nodes::onMessageReceived(), smacc2::client_behaviors::CbWaitTopicMessage< TMessage >::onMessageReceived(), cl_nav2z::CbNav2ZClientBehaviorBase::onNavigationActionAbort(), cl_nav2z::CbNav2ZClientBehaviorBase::onNavigationActionSuccess(), cl_nav2z::CbNavigateNextWaypointUntilReached::onNavigationActionSuccess(), cl_nav2z::CbNavigateNextWaypointUntilReached::onNavigationActionSuccess(), cl_nav2z::CbNav2ZClientBehaviorBase::onNavigationResult(), cl_lifecyclenode::CbConfigure::onOrthogonalAllocation(), cl_moveit2z::CbMoveEndEffectorTrajectory::onOrthogonalAllocation(), smacc2::SmaccAsyncClientBehavior::onOrthogonalAllocation(), smacc2::client_behaviors::CbServiceCall< ServiceType >::onServiceResponse(), cl_multirole_sensor::CbDefaultMultiRoleSensorBehavior< ClientType >::onStateOrthogonalAllocation(), smacc2::client_behaviors::CbSequence::onSubNodeAbort(), smacc2::client_behaviors::CbSequence::onSubNodeSuccess(), cl_nav2z::CbNavigateNextWaypointFree::onSucessCallback(), postEvent(), postEvent(), cl_keyboard::CbDefaultKeyboardBehavior::postKeyEvent(), smacc2::client_behaviors::CbSequence::recursiveConsumeNext(), smacc2::SmaccAsyncClientBehavior::requestForceFinish(), requiresComponent(), runtimeConfigure(), cl_nav2z::CbNav2ZClientBehaviorBase::sendGoal(), cl_nav2z::CbNavigateForward::setForwardDistance(), smacc2::client_behaviors::CbSequence::then(), cl_nav2z::CbAbsoluteRotate::updateTemporalBehaviorParameters(), smacc2::SmaccAsyncClientBehavior::waitFutureIfNotFinished(), and ~ISmaccClientBehavior().


◆ getName()
| std::string smacc2::ISmaccClientBehavior::getName | ( | ) | const |
Definition at line 38 of file smacc_client_behavior_base.cpp.
References smacc2::introspection::demangleSymbol().
Referenced by cl_moveit2z::CbCircularPivotMotion::computeCurrentEndEffectorPoseRelativeToPivot(), cl_moveit2z::CbMoveEndEffectorTrajectory::computeJointSpaceTrajectory(), smacc2::SmaccAsyncClientBehavior::dispose(), cl_moveit2z::CbMoveEndEffectorTrajectory::executeJointSpaceTrajectory(), executeOnEntry(), smacc2::SmaccAsyncClientBehavior::executeOnEntry(), executeOnExit(), smacc2::SmaccAsyncClientBehavior::executeOnExit(), cl_moveit2z::CbCircularPivotMotion::generateTrajectory(), cl_moveit2z::CbCircularPouringMotion::generateTrajectory(), cl_moveit2z::CbMoveCartesianRelative2::generateTrajectory(), cl_moveit2z::CbMoveEndEffectorTrajectory::getCurrentEndEffectorPose(), cl_moveit2z::CbMoveEndEffectorTrajectory::initializeROS(), cl_nav2z::CbNav2ZClientBehaviorBase::isOwnActionResponse(), cl_moveit2z::CbMoveKnownState::loadJointStatesFromFile(), cl_moveit2z::CbMoveJoints::moveJoints(), cl_moveit2z::CbMoveEndEffector::moveToAbsolutePose(), cl_moveit2z::CbEndEffectorRotate::onEntry(), cl_moveit2z::CbMoveEndEffectorTrajectory::onEntry(), cl_moveit2z::CbMoveLastTrajectoryInitialState::onEntry(), cl_moveit2z::CbUndoLastTrajectory::onEntry(), cl_nav2z::CbAbsoluteRotate::onEntry(), cl_nav2z::CbActiveStop::onEntry(), cl_nav2z::CbNavigateForward::onEntry(), cl_nav2z::CbNavigateGlobalPosition::onEntry(), cl_nav2z::CbPositionControlFreeSpace::onEntry(), cl_nav2z::CbPureSpinning::onEntry(), cl_nav2z::CbRotate::onEntry(), cl_nav2z::CbUndoPathBackwards::onEntry(), smacc2::client_behaviors::CbServiceCall< ServiceType >::onEntry(), smacc2::client_behaviors::CbWaitNode::onEntry(), smacc2::client_behaviors::CbWaitTopic::onEntry(), smacc2::SmaccClientBehavior::onEntry(), cl_moveit2z::CbMoveEndEffectorTrajectory::onExit(), cl_nav2z::CbUndoPathBackwards::onExit(), smacc2::SmaccClientBehavior::onExit(), cl_nav2z::CbNav2ZClientBehaviorBase::onNavigationActionAbort(), cl_nav2z::CbNav2ZClientBehaviorBase::onNavigationActionSuccess(), cl_nav2z::CbNavigateNextWaypointUntilReached::onNavigationActionSuccess(), cl_nav2z::CbNavigateNextWaypointUntilReached::onNavigationActionSuccess(), cl_nav2z::CbNav2ZClientBehaviorBase::onNavigationResult(), cl_moveit2z::CbMoveEndEffectorTrajectory::onOrthogonalAllocation(), smacc2::client_behaviors::CbServiceCall< ServiceType >::onServiceResponse(), smacc2::SmaccAsyncClientBehavior::requestForceFinish(), runtimeConfigure(), cl_nav2z::CbNav2ZClientBehaviorBase::sendGoal(), cl_nav2z::CbNavigateForward::setForwardDistance(), cl_nav2z::CbAbsoluteRotate::updateTemporalBehaviorParameters(), smacc2::SmaccAsyncClientBehavior::waitFutureIfNotFinished(), and ~ISmaccClientBehavior().

◆ getNode()
|
protectedvirtual |
Definition at line 40 of file smacc_client_behavior_base.cpp.
References smacc2::ISmaccStateMachine::getNode(), and stateMachine_.
Referenced by cl_moveit2z::CbCircularPivotMotion::computeCurrentEndEffectorPoseRelativeToPivot(), cl_moveit2z::CbCircularPivotMotion::createMarkers(), cl_moveit2z::CbCircularPouringMotion::createMarkers(), cl_moveit2z::CbMoveEndEffectorTrajectory::createMarkers(), cl_moveit2z::CbCircularPouringMotion::generateTrajectory(), cl_moveit2z::CbMoveCartesianRelative2::generateTrajectory(), cl_moveit2z::CbMoveEndEffectorTrajectory::getCurrentEndEffectorPose(), getLogger(), cl_moveit2z::CbMoveEndEffectorTrajectory::initializeROS(), cl_moveit2z::CbAttachObject::onEntry(), cl_moveit2z::CbEndEffectorRotate::onEntry(), cl_moveit2z::CbMoveCartesianRelative::onEntry(), cl_moveit2z::CbMoveEndEffector::onEntry(), cl_moveit2z::CbMoveEndEffectorRelative::onEntry(), cl_moveit2z::CbMoveJoints::onEntry(), cl_nav2z::CbAbsoluteRotate::onEntry(), cl_nav2z::CbActiveStop::onEntry(), cl_nav2z::CbNavigateBackwards::onEntry(), cl_nav2z::CbNavigateForward::onEntry(), cl_nav2z::CbPositionControlFreeSpace::onEntry(), cl_nav2z::CbPureSpinning::onEntry(), cl_nav2z::CbRotate::onEntry(), cl_nav2z::CbSpiralMotion::onEntry(), cl_nav2z::CbUndoPathBackwards::onEntry(), cl_nav2z::CbWaitNav2Nodes::onEntry(), cl_nav2z::CbWaitTransform::onEntry(), smacc2::client_behaviors::CbSequence::onEntry(), smacc2::client_behaviors::CbServiceCall< ServiceType >::onEntry(), smacc2::client_behaviors::CbSleepFor::onEntry(), smacc2::client_behaviors::CbWaitActionServer2< ActionT >::onEntry(), smacc2::client_behaviors::CbWaitActionServer::onEntry(), smacc2::client_behaviors::CbWaitNode::onEntry(), smacc2::client_behaviors::CbWaitTopic::onEntry(), smacc2::client_behaviors::CbWaitTopicMessage< TMessage >::onEntry(), cl_moveit2z::CbMoveEndEffectorTrajectory::onExit(), smacc2::SmaccAsyncClientBehavior::requestForceFinish(), cl_nav2z::CbAbsoluteRotate::updateTemporalBehaviorParameters(), and smacc2::SmaccAsyncClientBehavior::waitFutureIfNotFinished().

◆ getStateMachine()
|
inline |
Definition at line 61 of file smacc_client_behavior_impl.hpp.
References stateMachine_.
Referenced by smacc2::SmaccAsyncClientBehavior::onFailure(), smacc2::SmaccAsyncClientBehavior::onFinished(), smacc2::SmaccAsyncClientBehavior::onSuccess(), cl_ros2_timer::CbTimerCountdownLoop::onTimerTick(), cl_ros2_timer::CbTimerCountdownOnce::onTimerTick(), cl_ros_timer::CbTimerCountdownLoop::onTimerTick(), cl_ros_timer::CbTimerCountdownOnce::onTimerTick(), and cl_nav2z::CbNav2ZClientBehaviorBase::sendGoal().

◆ onEntry()
|
inlinevirtual |
Reimplemented in cl_http::CbHttpRequestBase, cl_keyboard::CbDefaultKeyboardBehavior, cl_keyboard::CbDefaultKeyboardBehavior, cl_lifecyclenode::CbActivate, cl_lifecyclenode::CbCleanup, cl_lifecyclenode::CbConfigure, cl_lifecyclenode::CbDeactivate, cl_lifecyclenode::CbDestroy, cl_lifecyclenode::CbShutdown, cl_moveit2z::CbAttachObject, cl_moveit2z::CbAttachObject, cl_moveit2z::CbDetachObject, cl_moveit2z::CbDetachObject, cl_moveit2z::CbEndEffectorRotate, cl_moveit2z::CbEndEffectorRotate, cl_moveit2z::CbExecuteLastTrajectory, cl_moveit2z::CbMoveCartesianRelative, cl_moveit2z::CbMoveEndEffector, cl_moveit2z::CbMoveEndEffector, cl_moveit2z::CbMoveEndEffectorRelative, cl_moveit2z::CbMoveEndEffectorTrajectory, cl_moveit2z::CbMoveEndEffectorTrajectory, cl_moveit2z::CbMoveJoints, cl_moveit2z::CbMoveJoints, cl_moveit2z::CbMoveKnownState, cl_moveit2z::CbMoveKnownState, cl_moveit2z::CbMoveLastTrajectoryInitialState, cl_moveit2z::CbMoveNamedTarget, cl_moveit2z::CbUndoLastTrajectory, cl_moveit2z::CbUndoLastTrajectory, cl_multirole_sensor::CbDefaultMultiRoleSensorBehavior< ClientType >, cl_nav2z::CbAbortNavigation, cl_nav2z::CbAbortNavigation, cl_nav2z::CbAbsoluteRotate, cl_nav2z::CbAbsoluteRotate, cl_nav2z::CbActiveStop, cl_nav2z::CbActiveStop, cl_nav2z::CbLoadWaypointsFile, cl_nav2z::CbLoadWaypointsFile, cl_nav2z::CbNavigateBackwards, cl_nav2z::CbNavigateBackwards, cl_nav2z::CbNavigateForward, cl_nav2z::CbNavigateForward, cl_nav2z::CbNavigateGlobalPosition, cl_nav2z::CbNavigateGlobalPosition, cl_nav2z::CbNavigateNamedWaypoint, cl_nav2z::CbNavigateNamedWaypoint, cl_nav2z::CbNavigateNextWaypoint, cl_nav2z::CbNavigateNextWaypoint, cl_nav2z::CbNavigateNextWaypointFree, cl_nav2z::CbNavigateNextWaypointFree, cl_nav2z::CbNavigateNextWaypointUntilReached, cl_nav2z::CbNavigateNextWaypointUntilReached, cl_nav2z::CbPauseSlam, cl_nav2z::CbPauseSlam, cl_nav2z::CbPositionControlFreeSpace, cl_nav2z::CbPositionControlFreeSpace, cl_nav2z::CbPureSpinning, cl_nav2z::CbPureSpinning, cl_nav2z::CbResumeSlam, cl_nav2z::CbResumeSlam, cl_nav2z::CbRotate, cl_nav2z::CbRotate, cl_nav2z::CbRotateLookAt, cl_nav2z::CbRotateLookAt, cl_nav2z::CbSeekWaypoint, cl_nav2z::CbSeekWaypoint, cl_nav2z::CbSpiralMotion, cl_nav2z::CbSpiralMotion, cl_nav2z::CbStopNavigation, cl_nav2z::CbStopNavigation, cl_nav2z::CbTrackPathOdometry, cl_nav2z::CbTrackPathOdometry, cl_nav2z::CbTrackPathSLAM, cl_nav2z::CbTrackPathSLAM, cl_nav2z::CbUndoPathBackwards, cl_nav2z::CbUndoPathBackwards, cl_nav2z::CbWaitNav2Nodes, cl_nav2z::CbWaitNav2Nodes, cl_nav2z::CbWaitPose, cl_nav2z::CbWaitPose, cl_nav2z::CbWaitTransform, cl_nav2z::CbWaitTransform, cl_ros2_timer::CbTimer, cl_ros2_timer::CbTimerCountdownLoop, cl_ros2_timer::CbTimerCountdownOnce, cl_ros_timer::CbTimer, cl_ros_timer::CbTimer, cl_ros_timer::CbTimer, cl_ros_timer::CbTimerCountdownLoop, cl_ros_timer::CbTimerCountdownLoop, cl_ros_timer::CbTimerCountdownLoop, cl_ros_timer::CbTimerCountdownOnce, cl_ros_timer::CbTimerCountdownOnce, cl_ros_timer::CbTimerCountdownOnce, smacc2::CbServiceServerCallbackBase< TService >, smacc2::client_behaviors::CbRosLaunch2, smacc2::client_behaviors::CbRosLaunch, smacc2::client_behaviors::CbRosStop2, smacc2::client_behaviors::CbSequence, smacc2::client_behaviors::CbServiceCall< ServiceType >, smacc2::client_behaviors::CbServiceCall< slam_toolbox::srv::Pause >, smacc2::client_behaviors::CbSleepFor, smacc2::client_behaviors::CbSubscriptionCallbackBase< TMsg >, smacc2::client_behaviors::CbWaitActionServer2< ActionT >, smacc2::client_behaviors::CbWaitActionServer, smacc2::client_behaviors::CbWaitNode, smacc2::client_behaviors::CbWaitTopic, smacc2::client_behaviors::CbWaitTopicMessage< TMessage >, and smacc2::SmaccClientBehavior.
Definition at line 55 of file smacc_client_behavior_base.hpp.
Referenced by executeOnEntry(), smacc2::SmaccAsyncClientBehavior::executeOnEntry(), and cl_moveit2z::CbEndEffectorRotate::onEntry().

◆ onExit()
|
inlinevirtual |
Reimplemented in cl_http::CbHttpRequestBase, cl_lifecyclenode::CbDeactivateOnExit, cl_moveit2z::CbAttachObject, cl_moveit2z::CbAttachObject, cl_moveit2z::CbDetachObject, cl_moveit2z::CbDetachObject, cl_moveit2z::CbMoveCartesianRelative, cl_moveit2z::CbMoveEndEffectorRelative, cl_moveit2z::CbMoveEndEffectorTrajectory, cl_moveit2z::CbMoveEndEffectorTrajectory, cl_moveit2z::CbMoveJoints, cl_moveit2z::CbMoveJoints, cl_moveit2z::CbMoveNamedTarget, cl_multirole_sensor::CbDefaultMultiRoleSensorBehavior< ClientType >, cl_nav2z::CbAbortNavigation, cl_nav2z::CbAbortNavigation, cl_nav2z::CbAbsoluteRotate, cl_nav2z::CbAbsoluteRotate, cl_nav2z::CbActiveStop, cl_nav2z::CbActiveStop, cl_nav2z::CbLoadWaypointsFile, cl_nav2z::CbLoadWaypointsFile, cl_nav2z::CbNavigateBackwards, cl_nav2z::CbNavigateBackwards, cl_nav2z::CbNavigateForward, cl_nav2z::CbNavigateForward, cl_nav2z::CbNavigateGlobalPosition, cl_nav2z::CbNavigateGlobalPosition, cl_nav2z::CbNavigateNamedWaypoint, cl_nav2z::CbNavigateNamedWaypoint, cl_nav2z::CbNavigateNextWaypoint, cl_nav2z::CbNavigateNextWaypoint, cl_nav2z::CbNavigateNextWaypointFree, cl_nav2z::CbNavigateNextWaypointFree, cl_nav2z::CbNavigateNextWaypointUntilReached, cl_nav2z::CbNavigateNextWaypointUntilReached, cl_nav2z::CbPositionControlFreeSpace, cl_nav2z::CbPositionControlFreeSpace, cl_nav2z::CbPureSpinning, cl_nav2z::CbPureSpinning, cl_nav2z::CbSaveSlamMap, cl_nav2z::CbSaveSlamMap, cl_nav2z::CbSeekWaypoint, cl_nav2z::CbSeekWaypoint, cl_nav2z::CbSpiralMotion, cl_nav2z::CbSpiralMotion, cl_nav2z::CbStopNavigation, cl_nav2z::CbStopNavigation, cl_nav2z::CbTrackPathOdometry, cl_nav2z::CbTrackPathOdometry, cl_nav2z::CbTrackPathSLAM, cl_nav2z::CbTrackPathSLAM, cl_nav2z::CbUndoPathBackwards, cl_nav2z::CbUndoPathBackwards, cl_ros2_timer::CbTimer, cl_ros2_timer::CbTimerCountdownLoop, cl_ros2_timer::CbTimerCountdownOnce, cl_ros_timer::CbTimer, cl_ros_timer::CbTimerCountdownLoop, cl_ros_timer::CbTimerCountdownOnce, smacc2::client_behaviors::CbSequence, smacc2::client_behaviors::CbSleepFor, and smacc2::SmaccClientBehavior.
Definition at line 57 of file smacc_client_behavior_base.hpp.
Referenced by executeOnExit(), and smacc2::SmaccAsyncClientBehavior::executeOnExit().
◆ onOrthogonalAllocation()
|
private |
Definition at line 99 of file smacc_client_behavior_impl.hpp.
◆ onStateOrthogonalAllocation()
|
private |
Definition at line 104 of file smacc_client_behavior_impl.hpp.
◆ postEvent() [1/2]
|
protected |
Definition at line 45 of file smacc_client_behavior_impl.hpp.
References smacc2::CURRENT_STATE, getLogger(), postEvent(), and stateMachine_.
Referenced by cl_moveit2z::CbMoveEndEffectorTrajectory::onOrthogonalAllocation(), cl_ros_timer::CbTimer::onOrthogonalAllocation(), cl_ros_timer::CbTimerCountdownLoop::onOrthogonalAllocation(), cl_ros_timer::CbTimerCountdownOnce::onOrthogonalAllocation(), smacc2::SmaccAsyncClientBehavior::onOrthogonalAllocation(), cl_nav2z::CbNavigateNextWaypointUntilReached::onStateOrthogonalAllocation(), cl_ros2_timer::CbTimer::onStateOrthogonalAllocation(), cl_ros2_timer::CbTimerCountdownLoop::onStateOrthogonalAllocation(), cl_ros2_timer::CbTimerCountdownOnce::onStateOrthogonalAllocation(), postEvent(), cl_keyboard::CbDefaultKeyboardBehavior::postKeyEvent(), cl_multirole_sensor::CbDefaultMultiRoleSensorBehavior< ClientType >::propagateEvent(), and cl_multirole_sensor::CbDefaultMultiRoleSensorBehavior< ClientType >::propagateEvent2().


◆ postEvent() [2/2]
|
protected |
Definition at line 29 of file smacc_client_behavior_impl.hpp.
References smacc2::CURRENT_STATE, getLogger(), smacc2::ISmaccStateMachine::postEvent(), and stateMachine_.
◆ requiresClient()
| void smacc2::ISmaccClientBehavior::requiresClient | ( | SmaccClientType *& | storage | ) |
Definition at line 67 of file smacc_client_behavior_impl.hpp.
References currentOrthogonal, and smacc2::ISmaccOrthogonal::requiresClient().
Referenced by cl_moveit2z::CbAttachObject::onEntry(), cl_moveit2z::CbDetachObject::onEntry(), cl_moveit2z::CbEndEffectorRotate::onEntry(), cl_moveit2z::CbExecuteLastTrajectory::onEntry(), cl_moveit2z::CbMoveCartesianRelative::onEntry(), cl_moveit2z::CbMoveEndEffector::onEntry(), cl_moveit2z::CbMoveEndEffectorRelative::onEntry(), cl_moveit2z::CbMoveEndEffectorTrajectory::onEntry(), cl_moveit2z::CbMoveJoints::onEntry(), cl_moveit2z::CbMoveNamedTarget::onEntry(), cl_moveit2z::CbUndoLastTrajectory::onEntry(), cl_multirole_sensor::CbDefaultMultiRoleSensorBehavior< ClientType >::onEntry(), cl_ros2_timer::CbTimer::onEntry(), cl_ros2_timer::CbTimerCountdownLoop::onEntry(), cl_ros2_timer::CbTimerCountdownOnce::onEntry(), cl_ros_timer::CbTimer::onEntry(), cl_ros_timer::CbTimerCountdownLoop::onEntry(), cl_ros_timer::CbTimerCountdownOnce::onEntry(), smacc2::CbServiceServerCallbackBase< TService >::onEntry(), smacc2::client_behaviors::CbRosLaunch2::onEntry(), smacc2::client_behaviors::CbRosLaunch::onEntry(), smacc2::client_behaviors::CbRosStop2::onEntry(), smacc2::client_behaviors::CbSubscriptionCallbackBase< TMsg >::onEntry(), cl_lifecyclenode::CbActivate::onOrthogonalAllocation(), cl_lifecyclenode::CbCleanup::onOrthogonalAllocation(), cl_lifecyclenode::CbConfigure::onOrthogonalAllocation(), cl_lifecyclenode::CbDeactivate::onOrthogonalAllocation(), cl_lifecyclenode::CbDeactivateOnExit::onOrthogonalAllocation(), cl_lifecyclenode::CbDestroy::onOrthogonalAllocation(), cl_lifecyclenode::CbShutdown::onOrthogonalAllocation(), smacc2::client_behaviors::CbWaitActionServer::onOrthogonalAllocation(), cl_nav2z::CbAbortNavigation::onStateOrthogonalAllocation(), cl_nav2z::CbNav2ZClientBehaviorBase::onStateOrthogonalAllocation(), cl_nav2z::CbNavigateNextWaypointUntilReached::onStateOrthogonalAllocation(), cl_nav2z::CbWaitPose::onStateOrthogonalAllocation(), and cl_http::CbHttpRequestBase::runtimeConfigure().

◆ requiresComponent() [1/2]
| void smacc2::ISmaccClientBehavior::requiresComponent | ( | SmaccComponentType *& | storage, |
| bool | throwExceptionIfNotExist ) |
Definition at line 91 of file smacc_client_behavior_impl.hpp.
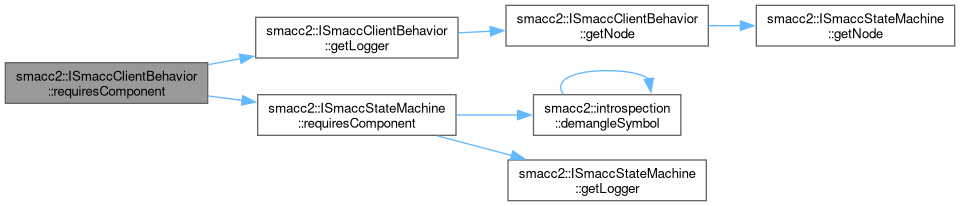
References smacc2::HARD, requiresComponent(), and smacc2::SOFT.
Referenced by cl_moveit2z::CbCircularPivotMotion::computeCurrentEndEffectorPoseRelativeToPivot(), cl_moveit2z::CbMoveEndEffectorTrajectory::computeJointSpaceTrajectory(), cl_nav2z::CbNavigateGlobalPosition::execute(), cl_moveit2z::CbMoveEndEffectorTrajectory::executeJointSpaceTrajectory(), cl_moveit2z::CbMoveEndEffectorTrajectory::getCurrentEndEffectorPose(), cl_moveit2z::CbMoveJoints::moveJoints(), cl_moveit2z::CbMoveEndEffector::moveToAbsolutePose(), cl_keyboard::CbDefaultKeyboardBehavior::onEntry(), cl_moveit2z::CbAttachObject::onEntry(), cl_moveit2z::CbDetachObject::onEntry(), cl_moveit2z::CbEndEffectorRotate::onEntry(), cl_moveit2z::CbExecuteLastTrajectory::onEntry(), cl_moveit2z::CbMoveEndEffectorTrajectory::onEntry(), cl_moveit2z::CbMoveLastTrajectoryInitialState::onEntry(), cl_moveit2z::CbUndoLastTrajectory::onEntry(), cl_nav2z::CbAbsoluteRotate::onEntry(), cl_nav2z::CbLoadWaypointsFile::onEntry(), cl_nav2z::CbNavigateBackwards::onEntry(), cl_nav2z::CbNavigateForward::onEntry(), cl_nav2z::CbNavigateGlobalPosition::onEntry(), cl_nav2z::CbNavigateNamedWaypoint::onEntry(), cl_nav2z::CbNavigateNextWaypoint::onEntry(), cl_nav2z::CbNavigateNextWaypointFree::onEntry(), cl_nav2z::CbPauseSlam::onEntry(), cl_nav2z::CbPositionControlFreeSpace::onEntry(), cl_nav2z::CbPureSpinning::onEntry(), cl_nav2z::CbResumeSlam::onEntry(), cl_nav2z::CbRotate::onEntry(), cl_nav2z::CbRotateLookAt::onEntry(), cl_nav2z::CbSeekWaypoint::onEntry(), cl_nav2z::CbStopNavigation::onEntry(), cl_nav2z::CbTrackPathOdometry::onEntry(), cl_nav2z::CbTrackPathSLAM::onEntry(), cl_nav2z::CbUndoPathBackwards::onEntry(), cl_nav2z::CbWaitPose::onEntry(), cl_ros2_timer::CbTimer::onEntry(), cl_ros2_timer::CbTimerCountdownLoop::onEntry(), cl_ros2_timer::CbTimerCountdownOnce::onEntry(), cl_moveit2z::CbMoveEndEffectorTrajectory::onExit(), cl_nav2z::CbUndoPathBackwards::onExit(), cl_nav2z::CbNavigateNextWaypointUntilReached::onNavigationActionSuccess(), cl_nav2z::CbAbortNavigation::onStateOrthogonalAllocation(), cl_nav2z::CbNav2ZClientBehaviorBase::onStateOrthogonalAllocation(), smacc2::client_behaviors::CbWaitActionServer2< ActionT >::onStateOrthogonalAllocation(), and requiresComponent().
◆ requiresComponent() [2/2]
| void smacc2::ISmaccClientBehavior::requiresComponent | ( | SmaccComponentType *& | storage, |
| ComponentRequirement | requirementType = ComponentRequirement::SOFT ) |
Definition at line 73 of file smacc_client_behavior_impl.hpp.
References getLogger(), smacc2::HARD, smacc2::ISmaccStateMachine::requiresComponent(), and stateMachine_.
◆ runtimeConfigure()
|
protectedvirtual |
Reimplemented in cl_http::CbHttpRequestBase.
Definition at line 58 of file smacc_client_behavior_base.cpp.
References getLogger(), and getName().

Friends And Related Symbol Documentation
◆ ISmaccAsynchronousClientBehavior
|
friend |
Definition at line 102 of file smacc_client_behavior_base.hpp.
◆ ISmaccOrthogonal
|
friend |
Definition at line 101 of file smacc_client_behavior_base.hpp.
◆ ISmaccState
|
friend |
Definition at line 100 of file smacc_client_behavior_base.hpp.
Member Data Documentation
◆ currentOrthogonal
|
private |
Definition at line 98 of file smacc_client_behavior_base.hpp.
Referenced by requiresClient().
◆ currentState
|
private |
Definition at line 97 of file smacc_client_behavior_base.hpp.
Referenced by cl_moveit2z::CbMoveEndEffectorTrajectory::computeJointSpaceTrajectory(), getCurrentState(), ISmaccClientBehavior(), cl_nav2z::CbPauseSlam::onEntry(), and cl_nav2z::CbResumeSlam::onEntry().
◆ stateMachine_
|
private |
Definition at line 94 of file smacc_client_behavior_base.hpp.
Referenced by getNode(), getStateMachine(), ISmaccClientBehavior(), postEvent(), postEvent(), and requiresComponent().
The documentation for this class was generated from the following files:
- smacc2/include/smacc2/smacc_client_behavior_base.hpp
- smacc2/include/smacc2/impl/smacc_client_behavior_impl.hpp
- smacc2/src/smacc2/smacc_client_behavior_base.cpp
Generated by