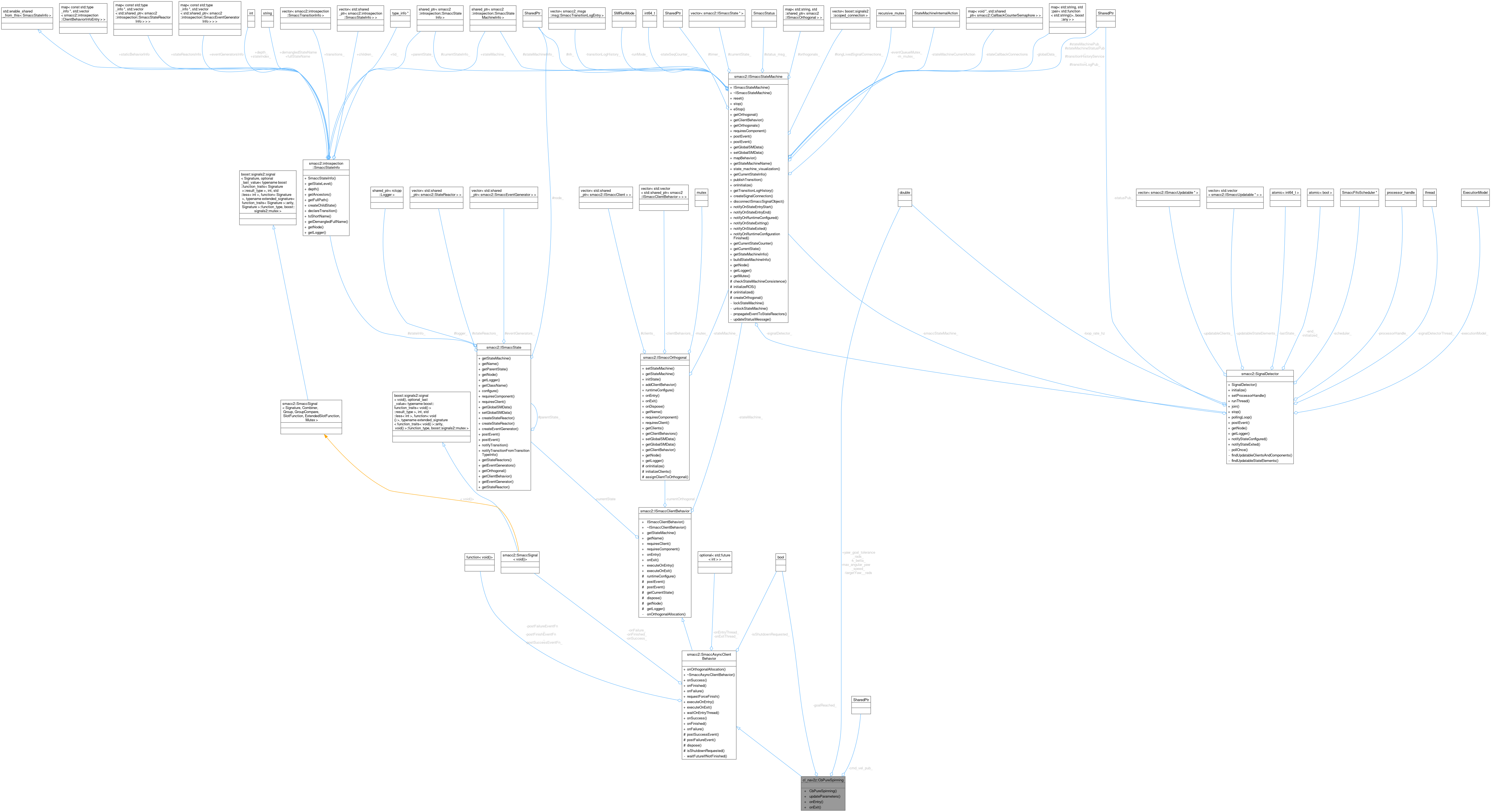
#include <cb_pure_spinning.hpp>

Public Member Functions | |
| CbPureSpinning (double targetYaw_rads, double max_angular_yaw_speed=0.5) | |
| void | updateParameters () |
| void | onEntry () override |
| void | onExit () override |
| CbPureSpinning (double targetYaw_rads, double max_angular_yaw_speed=0.5) | |
| void | updateParameters () |
| void | onEntry () override |
| void | onExit () override |
 Public Member Functions inherited from smacc2::SmaccAsyncClientBehavior Public Member Functions inherited from smacc2::SmaccAsyncClientBehavior | |
| template<typename TOrthogonal , typename TSourceObject > | |
| void | onOrthogonalAllocation () |
| template<typename TOrthogonal , typename TSourceObject > | |
| void | onStateOrthogonalAllocation () |
| virtual | ~SmaccAsyncClientBehavior () |
| template<typename TCallback , typename T > | |
| boost::signals2::connection | onSuccess (TCallback callback, T *object) |
| template<typename TCallback , typename T > | |
| boost::signals2::connection | onFinished (TCallback callback, T *object) |
| template<typename TCallback , typename T > | |
| boost::signals2::connection | onFailure (TCallback callback, T *object) |
| void | requestForceFinish () |
| void | executeOnEntry () override |
| void | executeOnExit () override |
| void | waitOnEntryThread (bool requestFinish) |
| template<typename TCallbackMethod , typename T > | |
| boost::signals2::connection | onSuccess (TCallbackMethod callback, T *object) |
| template<typename TCallbackMethod , typename T > | |
| boost::signals2::connection | onFinished (TCallbackMethod callback, T *object) |
| template<typename TCallbackMethod , typename T > | |
| boost::signals2::connection | onFailure (TCallbackMethod callback, T *object) |
| Public Member Functions inherited from smacc2::ISmaccClientBehavior | |
| ISmaccClientBehavior () | |
| virtual | ~ISmaccClientBehavior () |
| ISmaccStateMachine * | getStateMachine () |
| std::string | getName () const |
| template<typename SmaccClientType > | |
| void | requiresClient (SmaccClientType *&storage) |
| template<typename SmaccComponentType > | |
| void | requiresComponent (SmaccComponentType *&storage, bool throwExceptionIfNotExist) |
| template<typename SmaccComponentType > | |
| void | requiresComponent (SmaccComponentType *&storage, ComponentRequirement requirementType=ComponentRequirement::SOFT) |
Public Attributes | |
| double | yaw_goal_tolerance_rads_ |
Private Attributes | |
| double | targetYaw__rads |
| bool | goalReached_ |
| double | k_betta_ |
| double | max_angular_yaw_speed_ |
| rclcpp::Publisher< geometry_msgs::msg::Twist >::SharedPtr | cmd_vel_pub_ |
Additional Inherited Members | |
| Protected Member Functions inherited from smacc2::SmaccAsyncClientBehavior | |
| void | postSuccessEvent () |
| void | postFailureEvent () |
| virtual void | dispose () override |
| bool | isShutdownRequested () |
| onEntry is executed in a new thread. However the current state cannot be left until the onEntry thread finishes. This flag can be checked from the onEntry thread to force finishing the thread. | |
| Protected Member Functions inherited from smacc2::ISmaccClientBehavior | |
| virtual void | runtimeConfigure () |
| template<typename EventType > | |
| void | postEvent (const EventType &ev) |
| template<typename EventType > | |
| void | postEvent () |
| ISmaccState * | getCurrentState () |
| virtual rclcpp::Node::SharedPtr | getNode () const |
| virtual rclcpp::Logger | getLogger () const |
Detailed Description
Definition at line 28 of file cb_pure_spinning.hpp.
Constructor & Destructor Documentation
◆ CbPureSpinning() [1/2]
| cl_nav2z::CbPureSpinning::CbPureSpinning | ( | double | targetYaw_rads, |
| double | max_angular_yaw_speed = 0.5 ) |
Definition at line 29 of file cb_pure_spinning.cpp.
◆ CbPureSpinning() [2/2]
| cl_nav2z::CbPureSpinning::CbPureSpinning | ( | double | targetYaw_rads, |
| double | max_angular_yaw_speed = 0.5 ) |
Member Function Documentation
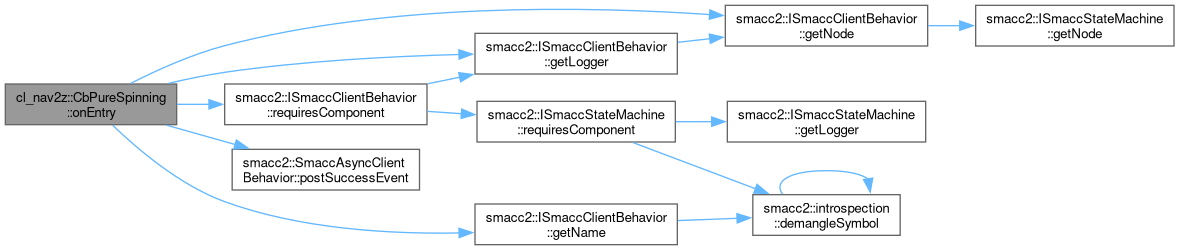
◆ onEntry() [1/2]
|
overridevirtual |
Reimplemented from smacc2::ISmaccClientBehavior.
Definition at line 39 of file cb_pure_spinning.cpp.
References cmd_vel_pub_, smacc2::ISmaccClientBehavior::getLogger(), smacc2::ISmaccClientBehavior::getName(), smacc2::ISmaccClientBehavior::getNode(), goalReached_, k_betta_, max_angular_yaw_speed_, smacc2::SmaccAsyncClientBehavior::postSuccessEvent(), smacc2::ISmaccClientBehavior::requiresComponent(), targetYaw__rads, and yaw_goal_tolerance_rads_.
◆ onEntry() [2/2]
|
overridevirtual |
Reimplemented from smacc2::ISmaccClientBehavior.
◆ onExit() [1/2]
|
overridevirtual |
Reimplemented from smacc2::ISmaccClientBehavior.
Definition at line 101 of file cb_pure_spinning.cpp.
◆ onExit() [2/2]
|
overridevirtual |
Reimplemented from smacc2::ISmaccClientBehavior.
◆ updateParameters() [1/2]
| void cl_nav2z::CbPureSpinning::updateParameters | ( | ) |
Definition at line 37 of file cb_pure_spinning.cpp.
◆ updateParameters() [2/2]
| void cl_nav2z::CbPureSpinning::updateParameters | ( | ) |
Member Data Documentation
◆ cmd_vel_pub_
|
private |
Definition at line 36 of file cb_pure_spinning.hpp.
Referenced by onEntry().
◆ goalReached_
|
private |
Definition at line 32 of file cb_pure_spinning.hpp.
Referenced by onEntry().
◆ k_betta_
|
private |
Definition at line 33 of file cb_pure_spinning.hpp.
Referenced by onEntry().
◆ max_angular_yaw_speed_
|
private |
Definition at line 34 of file cb_pure_spinning.hpp.
Referenced by onEntry().
◆ targetYaw__rads
|
private |
Definition at line 31 of file cb_pure_spinning.hpp.
Referenced by onEntry().
◆ yaw_goal_tolerance_rads_
| double cl_nav2z::CbPureSpinning::yaw_goal_tolerance_rads_ |
Definition at line 39 of file cb_pure_spinning.hpp.
Referenced by onEntry().
The documentation for this struct was generated from the following files:
- smacc2_client_library/cl_nav2z/include/cl_nav2z/client_behaviors/cb_pure_spinning.hpp
- smacc2_client_library/nav2z_client/nav2z_client/include/nav2z_client/client_behaviors/cb_pure_spinning.hpp
- smacc2_client_library/cl_nav2z/src/cl_nav2z/client_behaviors/cb_pure_spinning.cpp
- smacc2_client_library/nav2z_client/nav2z_client/src/nav2z_client/client_behaviors/cb_pure_spinning.cpp
Generated by