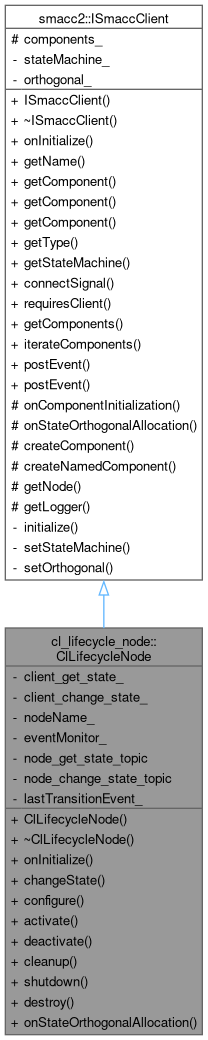
#include <cl_lifecycle_node.hpp>
Public Member Functions | |
| ClLifecycleNode (std::string nodeName) | |
| virtual | ~ClLifecycleNode () |
| void | onInitialize () override |
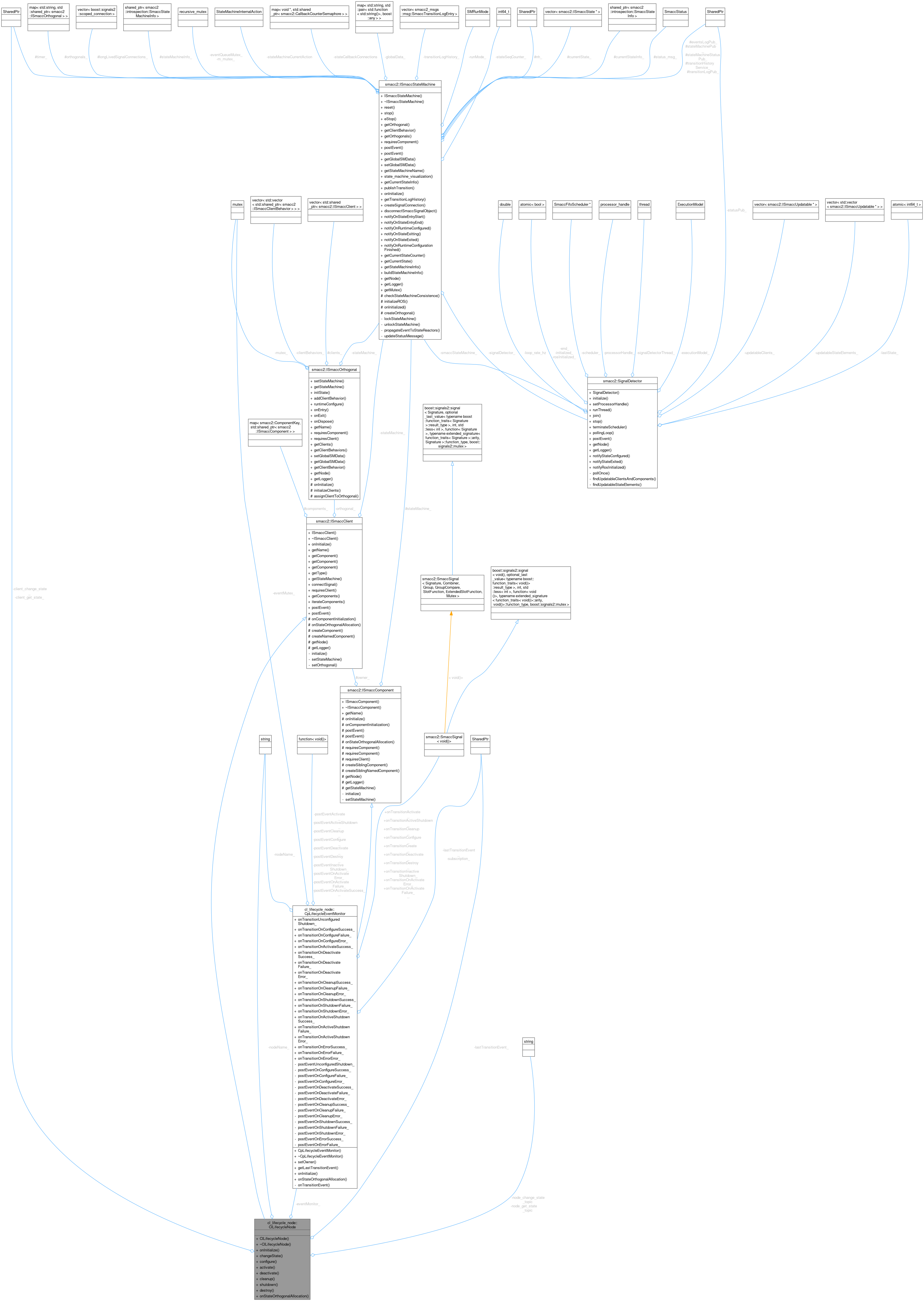
| void | changeState (uint8_t state) |
| void | configure () |
| void | activate () |
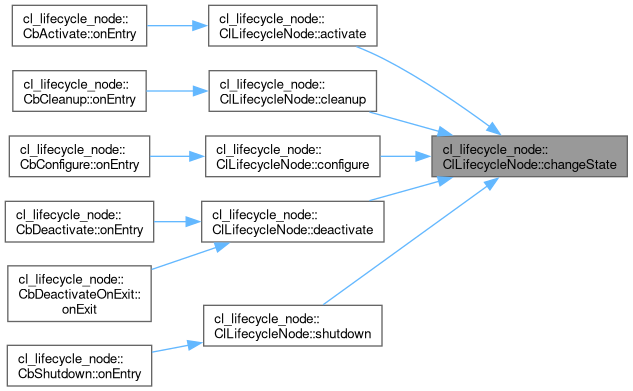
| void | deactivate () |
| void | cleanup () |
| void | shutdown () |
| void | destroy () |
| template<typename TOrthogonal , typename TSourceObject > | |
| void | onStateOrthogonalAllocation () |
| Configure component for event posting during orthogonal allocation. | |
 Public Member Functions inherited from smacc2::ISmaccClient Public Member Functions inherited from smacc2::ISmaccClient | |
| ISmaccClient () | |
| virtual | ~ISmaccClient () |
| virtual std::string | getName () const |
| template<typename TComponent > | |
| TComponent * | getComponent () |
| template<typename TComponent > | |
| TComponent * | getComponent (std::string name) |
| template<typename TComponent > | |
| TComponent * | getComponent (int index) |
| virtual smacc2::introspection::TypeInfo::Ptr | getType () |
| ISmaccStateMachine * | getStateMachine () |
| template<typename TSmaccSignal , typename T > | |
| void | connectSignal (TSmaccSignal &signal, void(T::*callback)(), T *object) |
| template<typename SmaccClientType > | |
| void | requiresClient (SmaccClientType *&storage) |
| void | getComponents (std::vector< std::shared_ptr< ISmaccComponent > > &components) |
| const std::vector< std::shared_ptr< ISmaccComponent > > & | iterateComponents () const |
| template<typename EventType > | |
| void | postEvent (const EventType &ev) |
| template<typename EventType > | |
| void | postEvent () |
Private Attributes | |
| rclcpp::Client< lifecycle_msgs::srv::GetState >::SharedPtr | client_get_state_ |
| rclcpp::Client< lifecycle_msgs::srv::ChangeState >::SharedPtr | client_change_state_ |
| std::string | nodeName_ |
| CpLifecycleEventMonitor * | eventMonitor_ |
| const std::string | node_get_state_topic = "/get_state" |
| const std::string | node_change_state_topic = "/change_state" |
| lifecycle_msgs::msg::TransitionEvent::SharedPtr | lastTransitionEvent_ |
Additional Inherited Members | |
| Protected Member Functions inherited from smacc2::ISmaccClient | |
| template<typename TOrthogonal , typename TClient > | |
| void | onComponentInitialization () |
| template<typename TOrthogonal , typename TSourceObject > | |
| void | onStateOrthogonalAllocation () |
| template<typename SmaccComponentType , typename TOrthogonal , typename TClient , typename... TArgs> | |
| SmaccComponentType * | createComponent (TArgs... targs) |
| template<typename SmaccComponentType , typename TOrthogonal , typename TClient , typename... TArgs> | |
| SmaccComponentType * | createNamedComponent (std::string name, TArgs... targs) |
| rclcpp::Node::SharedPtr | getNode () |
| rclcpp::Logger | getLogger () |
| Protected Attributes inherited from smacc2::ISmaccClient | |
| std::map< ComponentKey, std::shared_ptr< smacc2::ISmaccComponent > > | components_ |
Detailed Description
Definition at line 194 of file cl_lifecycle_node.hpp.
Constructor & Destructor Documentation
◆ ClLifecycleNode()
| cl_lifecycle_node::ClLifecycleNode::ClLifecycleNode | ( | std::string | nodeName | ) |
Definition at line 26 of file cl_lifecycle_node.cpp.
◆ ~ClLifecycleNode()
|
virtual |
Definition at line 31 of file cl_lifecycle_node.cpp.
Member Function Documentation
◆ activate()
| void cl_lifecycle_node::ClLifecycleNode::activate | ( | ) |
Definition at line 50 of file cl_lifecycle_node.cpp.
References changeState().
Referenced by cl_lifecycle_node::CbActivate::onEntry().


◆ changeState()
| void cl_lifecycle_node::ClLifecycleNode::changeState | ( | uint8_t | state | ) |
Definition at line 42 of file cl_lifecycle_node.cpp.
References client_change_state_.
Referenced by activate(), cleanup(), configure(), deactivate(), and shutdown().
◆ cleanup()
| void cl_lifecycle_node::ClLifecycleNode::cleanup | ( | ) |
Definition at line 65 of file cl_lifecycle_node.cpp.
References changeState().
Referenced by cl_lifecycle_node::CbCleanup::onEntry().


◆ configure()
| void cl_lifecycle_node::ClLifecycleNode::configure | ( | ) |
Definition at line 60 of file cl_lifecycle_node.cpp.
References changeState().
Referenced by cl_lifecycle_node::CbConfigure::onEntry().


◆ deactivate()
| void cl_lifecycle_node::ClLifecycleNode::deactivate | ( | ) |
Definition at line 55 of file cl_lifecycle_node.cpp.
References changeState().
Referenced by cl_lifecycle_node::CbDeactivate::onEntry(), and cl_lifecycle_node::CbDeactivateOnExit::onExit().

◆ destroy()
| void cl_lifecycle_node::ClLifecycleNode::destroy | ( | ) |

◆ onInitialize()
|
overridevirtual |
Reimplemented from smacc2::ISmaccClient.
Definition at line 33 of file cl_lifecycle_node.cpp.
References client_change_state_, client_get_state_, smacc2::ISmaccClient::getNode(), node_change_state_topic, node_get_state_topic, and nodeName_.

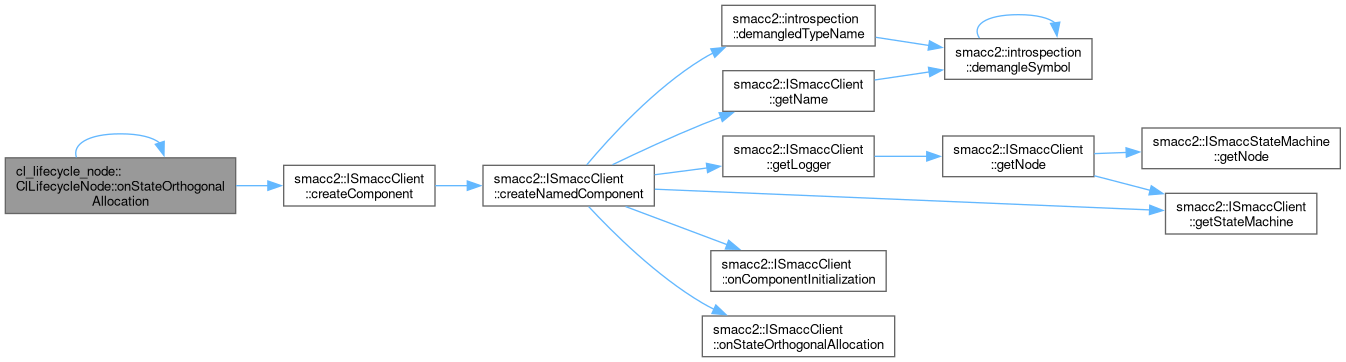
◆ onStateOrthogonalAllocation()
|
inline |
Configure component for event posting during orthogonal allocation.
Definition at line 228 of file cl_lifecycle_node.hpp.
References smacc2::ISmaccClient::createComponent(), eventMonitor_, nodeName_, and onStateOrthogonalAllocation().
Referenced by onStateOrthogonalAllocation().
◆ shutdown()
| void cl_lifecycle_node::ClLifecycleNode::shutdown | ( | ) |
Definition at line 70 of file cl_lifecycle_node.cpp.
References changeState().
Referenced by cl_lifecycle_node::CbShutdown::onEntry().


Member Data Documentation
◆ client_change_state_
|
private |
Definition at line 245 of file cl_lifecycle_node.hpp.
Referenced by changeState(), and onInitialize().
◆ client_get_state_
|
private |
Definition at line 244 of file cl_lifecycle_node.hpp.
Referenced by onInitialize().
◆ eventMonitor_
|
private |
Definition at line 250 of file cl_lifecycle_node.hpp.
Referenced by onStateOrthogonalAllocation().
◆ lastTransitionEvent_
|
private |
Definition at line 254 of file cl_lifecycle_node.hpp.
◆ node_change_state_topic
|
private |
Definition at line 252 of file cl_lifecycle_node.hpp.
Referenced by onInitialize().
◆ node_get_state_topic
|
private |
Definition at line 251 of file cl_lifecycle_node.hpp.
Referenced by onInitialize().
◆ nodeName_
|
private |
Definition at line 247 of file cl_lifecycle_node.hpp.
Referenced by onInitialize(), and onStateOrthogonalAllocation().
The documentation for this class was generated from the following files:
- smacc2_client_library/cl_lifecycle_node/include/cl_lifecycle_node/cl_lifecycle_node.hpp
- smacc2_client_library/cl_lifecycle_node/src/cl_lifecycle_node/cl_lifecycle_node.cpp
Generated by