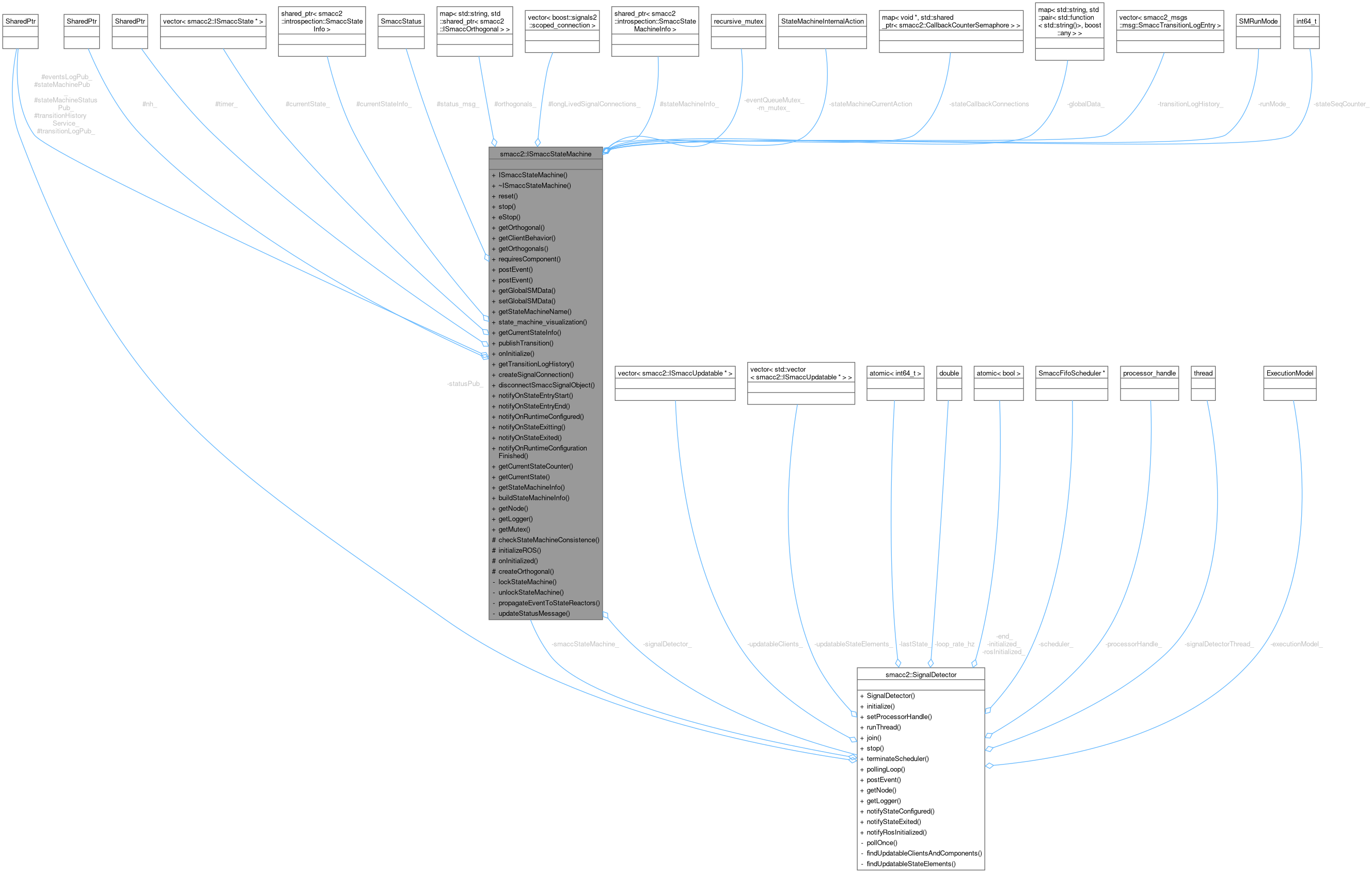
#include <smacc_state_machine.hpp>

Public Member Functions | |
| ISmaccStateMachine (std::string stateMachineName, SignalDetector *signalDetector, rclcpp::NodeOptions nodeOptions=rclcpp::NodeOptions()) | |
| virtual | ~ISmaccStateMachine () |
| virtual void | reset () |
| virtual void | stop () |
| virtual void | eStop () |
| template<typename TOrthogonal > | |
| TOrthogonal * | getOrthogonal () |
| template<typename TOrthogonal , typename TClientBehavior > | |
| TClientBehavior * | getClientBehavior (int index=0) |
| const std::map< std::string, std::shared_ptr< smacc2::ISmaccOrthogonal > > & | getOrthogonals () const |
| template<typename SmaccComponentType > | |
| void | requiresComponent (SmaccComponentType *&storage, ComponentRequirement requirementType) |
| template<typename EventType > | |
| void | postEvent (EventType *ev, EventLifeTime evlifetime=EventLifeTime::ABSOLUTE) |
| template<typename EventType > | |
| void | postEvent (EventLifeTime evlifetime=EventLifeTime::ABSOLUTE) |
| template<typename T > | |
| bool | getGlobalSMData (std::string name, T &ret) |
| template<typename T > | |
| void | setGlobalSMData (std::string name, T value) |
| std::string | getStateMachineName () |
| void | state_machine_visualization () |
| std::shared_ptr< SmaccStateInfo > | getCurrentStateInfo () |
| void | publishTransition (const SmaccTransitionInfo &transitionInfo) |
| virtual void | onInitialize () |
| this function should be implemented by the user to create the orthogonals | |
| void | getTransitionLogHistory (const std::shared_ptr< rmw_request_id_t > request_header, const std::shared_ptr< smacc2_msgs::srv::SmaccGetTransitionHistory::Request > req, std::shared_ptr< smacc2_msgs::srv::SmaccGetTransitionHistory::Response > res) |
| template<typename TSmaccSignal , typename TMemberFunctionPrototype , typename TSmaccObjectType > | |
| smacc2::SmaccSignalConnection | createSignalConnection (TSmaccSignal &signal, TMemberFunctionPrototype callback, TSmaccObjectType *object) |
| void | disconnectSmaccSignalObject (void *object) |
| template<typename StateType > | |
| void | notifyOnStateEntryStart (StateType *state) |
| template<typename StateType > | |
| void | notifyOnStateEntryEnd (StateType *state) |
| template<typename StateType > | |
| void | notifyOnRuntimeConfigured (StateType *state) |
| template<typename StateType > | |
| void | notifyOnStateExiting (StateType *state) |
| template<typename StateType > | |
| void | notifyOnStateExited (StateType *state) |
| template<typename StateType > | |
| void | notifyOnRuntimeConfigurationFinished (StateType *state) |
| int64_t | getCurrentStateCounter () const |
| ISmaccState * | getCurrentState () const |
| const SmaccStateMachineInfo & | getStateMachineInfo () |
| template<typename InitialStateType > | |
| void | buildStateMachineInfo () |
| rclcpp::Node::SharedPtr | getNode () |
| rclcpp::Logger | getLogger () |
| std::recursive_mutex & | getMutex () |
Protected Member Functions | |
| void | checkStateMachineConsistence () |
| void | initializeROS (std::string smshortname) |
| void | onInitialized () |
| template<typename TOrthogonal > | |
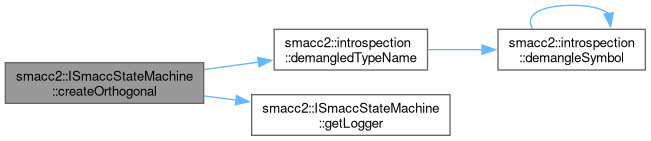
| void | createOrthogonal () |
Protected Attributes | |
| rclcpp::Node::SharedPtr | nh_ |
| rclcpp::TimerBase::SharedPtr | timer_ |
| rclcpp::Publisher< smacc2_msgs::msg::SmaccStateMachine >::SharedPtr | stateMachinePub_ |
| rclcpp::Publisher< smacc2_msgs::msg::SmaccStatus >::SharedPtr | stateMachineStatusPub_ |
| rclcpp::Publisher< smacc2_msgs::msg::SmaccTransitionLogEntry >::SharedPtr | transitionLogPub_ |
| rclcpp::Publisher< smacc2_msgs::msg::SmaccEvent >::SharedPtr | eventsLogPub_ |
| rclcpp::Service< smacc2_msgs::srv::SmaccGetTransitionHistory >::SharedPtr | transitionHistoryService_ |
| std::vector< ISmaccState * > | currentState_ |
| std::shared_ptr< SmaccStateInfo > | currentStateInfo_ |
| smacc2_msgs::msg::SmaccStatus | status_msg_ |
| std::map< std::string, std::shared_ptr< smacc2::ISmaccOrthogonal > > | orthogonals_ |
| std::shared_ptr< SmaccStateMachineInfo > | stateMachineInfo_ |
Private Member Functions | |
| void | lockStateMachine (std::string msg) |
| void | unlockStateMachine (std::string msg) |
| template<typename EventType > | |
| void | propagateEventToStateReactors (ISmaccState *st, EventType *ev) |
| void | updateStatusMessage () |
Private Attributes | |
| std::recursive_mutex | m_mutex_ |
| std::recursive_mutex | eventQueueMutex_ |
| StateMachineInternalAction | stateMachineCurrentAction |
| std::map< void *, std::shared_ptr< CallbackCounterSemaphore > > | stateCallbackConnections |
| std::map< std::string, std::pair< std::function< std::string()>, boost::any > > | globalData_ |
| std::vector< smacc2_msgs::msg::SmaccTransitionLogEntry > | transitionLogHistory_ |
| smacc2::SMRunMode | runMode_ |
| SignalDetector * | signalDetector_ |
| int64_t | stateSeqCounter_ |
Friends | |
| class | ISmaccState |
| class | SignalDetector |
Detailed Description
Definition at line 63 of file smacc_state_machine.hpp.
Constructor & Destructor Documentation
◆ ISmaccStateMachine()
| smacc2::ISmaccStateMachine::ISmaccStateMachine | ( | std::string | stateMachineName, |
| SignalDetector * | signalDetector, | ||
| rclcpp::NodeOptions | nodeOptions = rclcpp::NodeOptions() ) |
Definition at line 35 of file smacc_state_machine.cpp.
References smacc2::DEBUG, smacc2::SignalDetector::initialize(), nh_, smacc2::RELEASE, runMode_, and signalDetector_.

◆ ~ISmaccStateMachine()
|
virtual |
Definition at line 68 of file smacc_state_machine.cpp.
References nh_.
Member Function Documentation
◆ buildStateMachineInfo()
| void smacc2::ISmaccStateMachine::buildStateMachineInfo | ( | ) |
Definition at line 709 of file smacc_state_machine_impl.hpp.
References checkStateMachineConsistence(), getNode(), and stateMachineInfo_.
Referenced by smacc2::SmaccStateMachineBase< DerivedStateMachine, InitialStateType >::initiate_impl().


◆ checkStateMachineConsistence()
|
protected |
Definition at line 228 of file smacc_state_machine.cpp.
Referenced by buildStateMachineInfo().

◆ createOrthogonal()
|
protected |
Definition at line 85 of file smacc_state_machine_impl.hpp.
References smacc2::introspection::demangledTypeName(), getLogger(), m_mutex_, and orthogonals_.
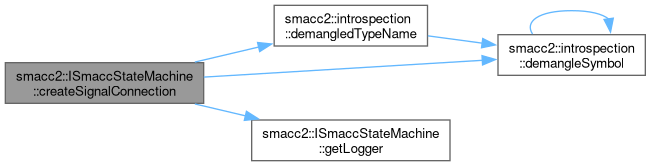
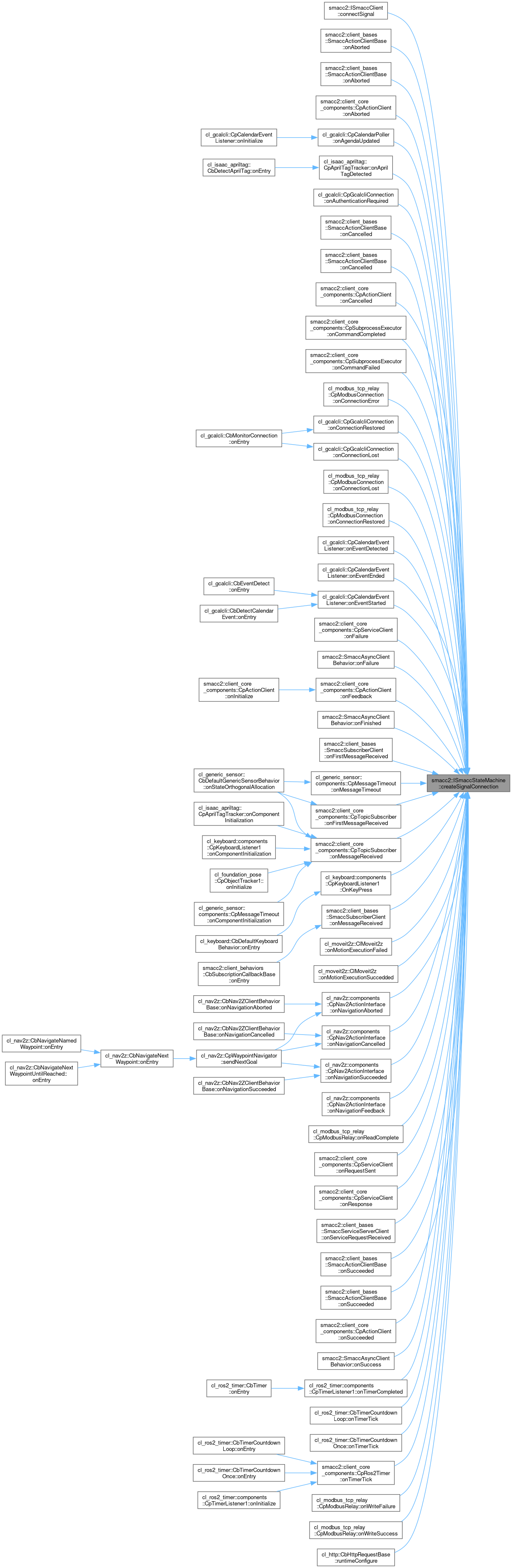
◆ createSignalConnection()
| smacc2::SmaccSignalConnection smacc2::ISmaccStateMachine::createSignalConnection | ( | TSmaccSignal & | signal, |
| TMemberFunctionPrototype | callback, | ||
| TSmaccObjectType * | object ) |
Definition at line 376 of file smacc_state_machine_impl.hpp.
References smacc2::introspection::demangledTypeName(), smacc2::introspection::demangleSymbol(), getLogger(), m_mutex_, and stateCallbackConnections.
Referenced by smacc2::ISmaccClient::connectSignal(), smacc2::client_bases::SmaccActionClientBase< ActionType >::onAborted(), smacc2::client_bases::SmaccActionClientBase< ActionType >::onAborted(), smacc2::client_core_components::CpActionClient< ActionType >::onAborted(), cl_gcalcli::CpCalendarPoller::onAgendaUpdated(), cl_isaac_apriltag::CpAprilTagTracker::onAprilTagDetected(), cl_gcalcli::CpGcalcliConnection::onAuthenticationRequired(), smacc2::client_bases::SmaccActionClientBase< ActionType >::onCancelled(), smacc2::client_bases::SmaccActionClientBase< ActionType >::onCancelled(), smacc2::client_core_components::CpActionClient< ActionType >::onCancelled(), smacc2::client_core_components::CpSubprocessExecutor::onCommandCompleted(), smacc2::client_core_components::CpSubprocessExecutor::onCommandFailed(), cl_modbus_tcp_relay::CpModbusConnection::onConnectionError(), cl_gcalcli::CpGcalcliConnection::onConnectionLost(), cl_modbus_tcp_relay::CpModbusConnection::onConnectionLost(), cl_gcalcli::CpGcalcliConnection::onConnectionRestored(), cl_modbus_tcp_relay::CpModbusConnection::onConnectionRestored(), cl_px4_mr::CbArmPX4::onEntry(), cl_px4_mr::CbChangeAltitude::onEntry(), cl_px4_mr::CbDisarmPX4::onEntry(), cl_px4_mr::CbFollowWaypoints::onEntry(), cl_px4_mr::CbGoToLocation::onEntry(), cl_px4_mr::CbLand::onEntry(), cl_px4_mr::CbReturnToHome::onEntry(), cl_px4_mr::CbTakeOff::onEntry(), cl_gcalcli::CpCalendarEventListener::onEventDetected(), cl_gcalcli::CpCalendarEventListener::onEventEnded(), cl_gcalcli::CpCalendarEventListener::onEventStarted(), smacc2::client_core_components::CpServiceClient< ServiceType >::onFailure(), smacc2::SmaccAsyncClientBehavior::onFailure(), smacc2::client_core_components::CpActionClient< ActionType >::onFeedback(), smacc2::SmaccAsyncClientBehavior::onFinished(), smacc2::client_bases::SmaccSubscriberClient< MessageType >::onFirstMessageReceived(), smacc2::client_core_components::CpTopicSubscriber< MessageType >::onFirstMessageReceived(), cl_keyboard::components::CpKeyboardListener1::OnKeyPress(), smacc2::client_bases::SmaccSubscriberClient< MessageType >::onMessageReceived(), smacc2::client_core_components::CpTopicSubscriber< MessageType >::onMessageReceived(), cl_generic_sensor::components::CpMessageTimeout< MessageType >::onMessageTimeout(), cl_moveit2z::CpMoveGroupInterface::onMotionExecutionFailed(), cl_moveit2z::CpMoveGroupInterface::onMotionExecutionSucceeded(), cl_nav2z::components::CpNav2ActionInterface::onNavigationAborted(), cl_nav2z::components::CpNav2ActionInterface::onNavigationCancelled(), cl_nav2z::components::CpNav2ActionInterface::onNavigationFeedback(), cl_nav2z::components::CpNav2ActionInterface::onNavigationSucceeded(), cl_modbus_tcp_relay::CpModbusRelay::onReadComplete(), smacc2::client_core_components::CpServiceClient< ServiceType >::onRequestSent(), smacc2::client_core_components::CpServiceClient< ServiceType >::onResponse(), smacc2::client_bases::SmaccServiceServerClient< TService >::onServiceRequestReceived(), smacc2::client_bases::SmaccActionClientBase< ActionType >::onSucceeded(), smacc2::client_bases::SmaccActionClientBase< ActionType >::onSucceeded(), smacc2::client_core_components::CpActionClient< ActionType >::onSucceeded(), smacc2::SmaccAsyncClientBehavior::onSuccess(), cl_ros2_timer::CbTimerCountdownLoop::onTimerTick(), cl_ros2_timer::CbTimerCountdownOnce::onTimerTick(), smacc2::client_core_components::CpRos2Timer::onTimerTick(), cl_modbus_tcp_relay::CpModbusRelay::onWriteFailure(), cl_modbus_tcp_relay::CpModbusRelay::onWriteSuccess(), and cl_http::CbHttpRequestBase::runtimeConfigure().
◆ disconnectSmaccSignalObject()
| void smacc2::ISmaccStateMachine::disconnectSmaccSignalObject | ( | void * | object | ) |
Definition at line 73 of file smacc_state_machine.cpp.
References nh_, and stateCallbackConnections.
Referenced by notifyOnStateExited(), and smacc2::ISmaccOrthogonal::onDispose().

◆ eStop()
|
virtual |
Reimplemented in smacc2::SmaccStateMachineBase< DerivedStateMachine, InitialStateType >.
Definition at line 94 of file smacc_state_machine.cpp.
Referenced by smacc2::SmaccStateMachineBase< DerivedStateMachine, InitialStateType >::eStop().

◆ getClientBehavior()
|
inline |
Definition at line 84 of file smacc_state_machine.hpp.
References getClientBehavior(), and getOrthogonal().
Referenced by smacc2::ISmaccState::getClientBehavior(), and getClientBehavior().


◆ getCurrentState()
|
inline |
Definition at line 719 of file smacc_state_machine_impl.hpp.
References currentState_.
Referenced by cl_nav2z::CpWaypointNavigator::sendNextGoal().

◆ getCurrentStateCounter()
|
inline |
◆ getCurrentStateInfo()
|
inline |
Definition at line 114 of file smacc_state_machine.hpp.
References currentStateInfo_.
◆ getGlobalSMData()
| bool smacc2::ISmaccStateMachine::getGlobalSMData | ( | std::string | name, |
| T & | ret ) |
Definition at line 210 of file smacc_state_machine_impl.hpp.
References getLogger(), globalData_, and m_mutex_.
Referenced by smacc2::ISmaccOrthogonal::getGlobalSMData(), and smacc2::ISmaccState::getGlobalSMData().

◆ getLogger()
|
inline |
Definition at line 161 of file smacc_state_machine.hpp.
References nh_.
Referenced by createOrthogonal(), createSignalConnection(), getGlobalSMData(), getOrthogonal(), smacc2::SmaccStateMachineBase< DerivedStateMachine, InitialStateType >::initiate_impl(), notifyOnStateEntryEnd(), notifyOnStateEntryStart(), notifyOnStateExited(), notifyOnStateExiting(), postEvent(), postEvent(), propagateEventToStateReactors(), and requiresComponent().
◆ getMutex()
|
inline |
◆ getNode()
| rclcpp::Node::SharedPtr smacc2::ISmaccStateMachine::getNode | ( | ) |
Definition at line 88 of file smacc_state_machine.cpp.
References nh_.
Referenced by buildStateMachineInfo(), smacc2::ISmaccClient::getNode(), smacc2::ISmaccClientBehavior::getNode(), smacc2::ISmaccOrthogonal::getNode(), smacc2::SignalDetector::getNode(), smacc2::SmaccStateMachineBase< DerivedStateMachine, InitialStateType >::initiate_impl(), smacc2::SignalDetector::pollOnce(), and smacc2::SmaccState< MostDerived, Context, InnerInitial, historyMode >::SmaccState().
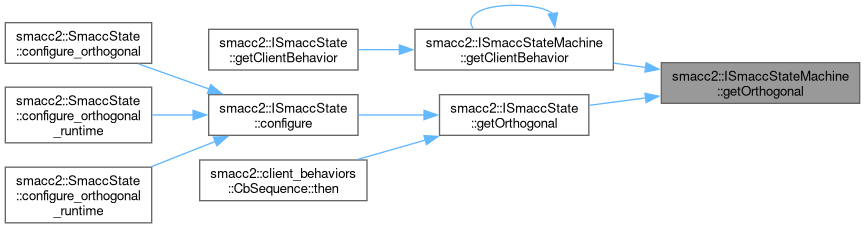
◆ getOrthogonal()
| TOrthogonal * smacc2::ISmaccStateMachine::getOrthogonal | ( | ) |
Definition at line 47 of file smacc_state_machine_impl.hpp.
References smacc2::introspection::demangledTypeName(), getLogger(), m_mutex_, and orthogonals_.
Referenced by getClientBehavior(), and smacc2::ISmaccState::getOrthogonal().
◆ getOrthogonals()
| const std::map< std::string, std::shared_ptr< smacc2::ISmaccOrthogonal > > & smacc2::ISmaccStateMachine::getOrthogonals | ( | ) | const |
Definition at line 97 of file smacc_state_machine.cpp.
References orthogonals_.
Referenced by smacc2::introspection::SmaccStateMachineInfo::assembleSMStructureMessage(), smacc2::SignalDetector::findUpdatableClientsAndComponents(), smacc2::SignalDetector::findUpdatableStateElements(), and smacc2::ISmaccState::requiresClient().

◆ getStateMachineInfo()
|
inline |
Definition at line 721 of file smacc_state_machine_impl.hpp.
References stateMachineInfo_.
Referenced by smacc2::SmaccState< MostDerived, Context, InnerInitial, historyMode >::getStateInfo().

◆ getStateMachineName()
| std::string smacc2::ISmaccStateMachine::getStateMachineName | ( | ) |
Definition at line 223 of file smacc_state_machine.cpp.
References smacc2::introspection::demangleSymbol().

◆ getTransitionLogHistory()
| void smacc2::ISmaccStateMachine::getTransitionLogHistory | ( | const std::shared_ptr< rmw_request_id_t > | request_header, |
| const std::shared_ptr< smacc2_msgs::srv::SmaccGetTransitionHistory::Request > | req, | ||
| std::shared_ptr< smacc2_msgs::srv::SmaccGetTransitionHistory::Response > | res ) |
Definition at line 184 of file smacc_state_machine.cpp.
References nh_, and transitionLogHistory_.
Referenced by initializeROS().

◆ initializeROS()
|
protected |
Definition at line 158 of file smacc_state_machine.cpp.
References eventsLogPub_, getTransitionLogHistory(), nh_, smacc2::SignalDetector::notifyRosInitialized(), signalDetector_, stateMachinePub_, stateMachineStatusPub_, transitionHistoryService_, and transitionLogPub_.
Referenced by smacc2::SmaccStateMachineBase< DerivedStateMachine, InitialStateType >::initiate_impl().


◆ lockStateMachine()
|
private |
Definition at line 211 of file smacc_state_machine.cpp.
Referenced by notifyOnStateExited().

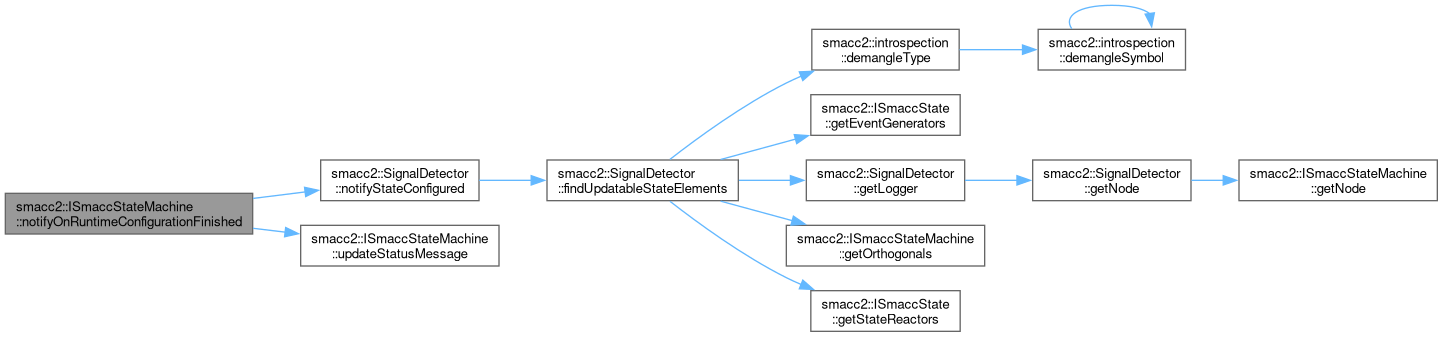
◆ notifyOnRuntimeConfigurationFinished()
| void smacc2::ISmaccStateMachine::notifyOnRuntimeConfigurationFinished | ( | StateType * | state | ) |
Definition at line 532 of file smacc_state_machine_impl.hpp.
References currentState_, m_mutex_, smacc2::SignalDetector::notifyStateConfigured(), orthogonals_, signalDetector_, smacc2::STATE_ENTERING, stateMachineCurrentAction, and updateStatusMessage().
Referenced by smacc2::SmaccState< MostDerived, Context, InnerInitial, historyMode >::entryStateInternal().

◆ notifyOnRuntimeConfigured()
| void smacc2::ISmaccStateMachine::notifyOnRuntimeConfigured | ( | StateType * | state | ) |
Definition at line 551 of file smacc_state_machine_impl.hpp.
References smacc2::STATE_CONFIGURING, and stateMachineCurrentAction.
Referenced by smacc2::SmaccState< MostDerived, Context, InnerInitial, historyMode >::entryStateInternal().

◆ notifyOnStateEntryEnd()
| void smacc2::ISmaccStateMachine::notifyOnStateEntryEnd | ( | StateType * | state | ) |
Definition at line 464 of file smacc_state_machine_impl.hpp.
References currentState_, smacc2::introspection::demangleSymbol(), getLogger(), m_mutex_, orthogonals_, smacc2::STATE_RUNNING, stateMachineCurrentAction, and updateStatusMessage().
Referenced by smacc2::SmaccState< MostDerived, Context, InnerInitial, historyMode >::entryStateInternal().


◆ notifyOnStateEntryStart()
| void smacc2::ISmaccStateMachine::notifyOnStateEntryStart | ( | StateType * | state | ) |
Definition at line 448 of file smacc_state_machine_impl.hpp.
References currentState_, currentStateInfo_, smacc2::introspection::demangleSymbol(), getLogger(), m_mutex_, orthogonals_, stateMachineInfo_, and stateSeqCounter_.
Referenced by smacc2::SmaccState< MostDerived, Context, InnerInitial, historyMode >::entryStateInternal().


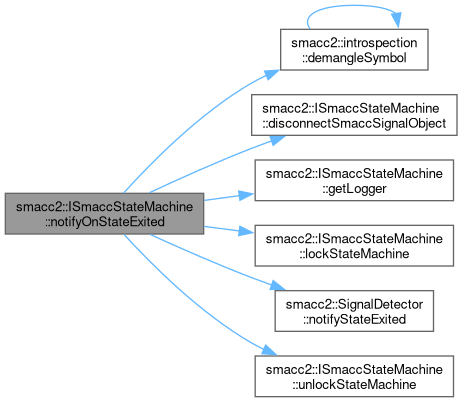
◆ notifyOnStateExited()
| void smacc2::ISmaccStateMachine::notifyOnStateExited | ( | StateType * | state | ) |
Definition at line 618 of file smacc_state_machine_impl.hpp.
References currentState_, smacc2::introspection::demangleSymbol(), disconnectSmaccSignalObject(), getLogger(), lockStateMachine(), smacc2::SignalDetector::notifyStateExited(), orthogonals_, signalDetector_, stateCallbackConnections, stateMachineCurrentAction, smacc2::TRANSITIONING, and unlockStateMachine().
Referenced by smacc2::SmaccState< MostDerived, Context, InnerInitial, historyMode >::exit().

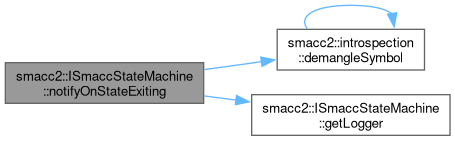
◆ notifyOnStateExiting()
| void smacc2::ISmaccStateMachine::notifyOnStateExiting | ( | StateType * | state | ) |
Definition at line 557 of file smacc_state_machine_impl.hpp.
References smacc2::introspection::demangleSymbol(), getLogger(), orthogonals_, smacc2::STATE_EXITING, and stateMachineCurrentAction.
Referenced by smacc2::SmaccState< MostDerived, Context, InnerInitial, historyMode >::exit().

◆ onInitialize()
|
virtual |
this function should be implemented by the user to create the orthogonals
Definition at line 149 of file smacc_state_machine.cpp.
Referenced by smacc2::SmaccStateMachineBase< DerivedStateMachine, InitialStateType >::initiate_impl().

◆ onInitialized()
|
protected |
Definition at line 151 of file smacc_state_machine.cpp.
References nh_, state_machine_visualization(), and timer_.
Referenced by smacc2::SmaccStateMachineBase< DerivedStateMachine, InitialStateType >::initiate_impl().


◆ postEvent() [1/2]
| void smacc2::ISmaccStateMachine::postEvent | ( | EventLifeTime | evlifetime = EventLifeTime::ABSOLUTE | ) |
Definition at line 201 of file smacc_state_machine_impl.hpp.
References smacc2::introspection::demangleSymbol(), getLogger(), and postEvent().
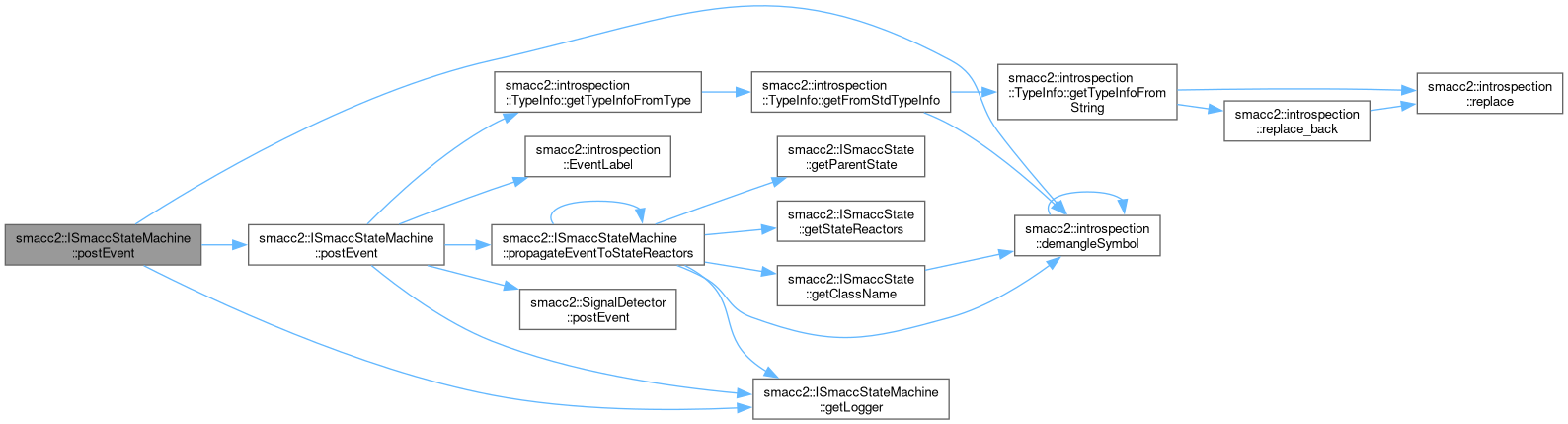
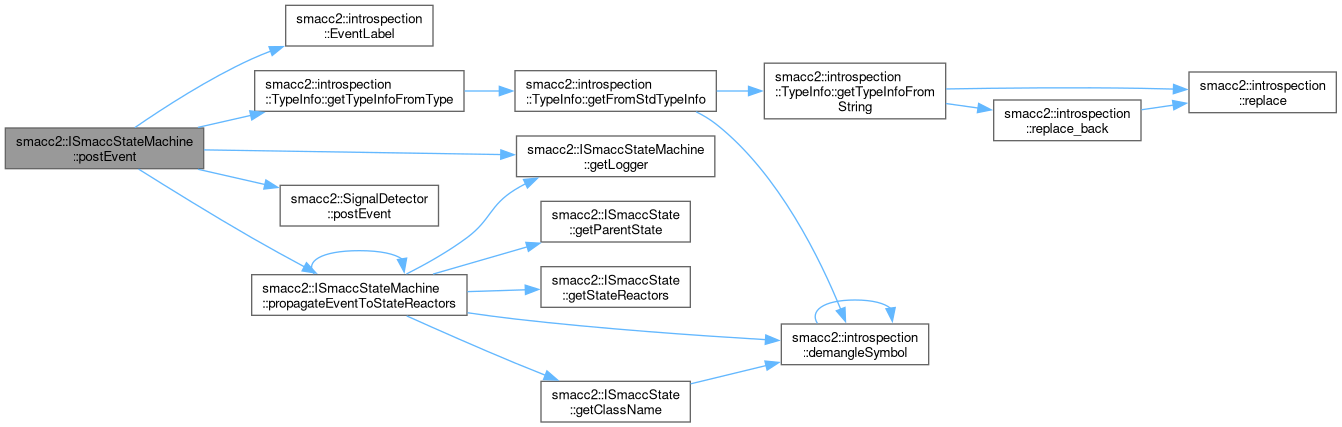
◆ postEvent() [2/2]
| void smacc2::ISmaccStateMachine::postEvent | ( | EventType * | ev, |
| EventLifeTime | evlifetime = EventLifeTime::ABSOLUTE ) |
Definition at line 147 of file smacc_state_machine_impl.hpp.
References smacc2::CURRENT_STATE, currentState_, smacc2::introspection::EventLabel(), eventQueueMutex_, eventsLogPub_, eventtypename, getLogger(), smacc2::introspection::TypeInfo::getTypeInfoFromType(), smacc2::SignalDetector::postEvent(), propagateEventToStateReactors(), signalDetector_, smacc2_event, smacc2::STATE_EXITING, stateMachineCurrentAction, and smacc2::TRANSITIONING.
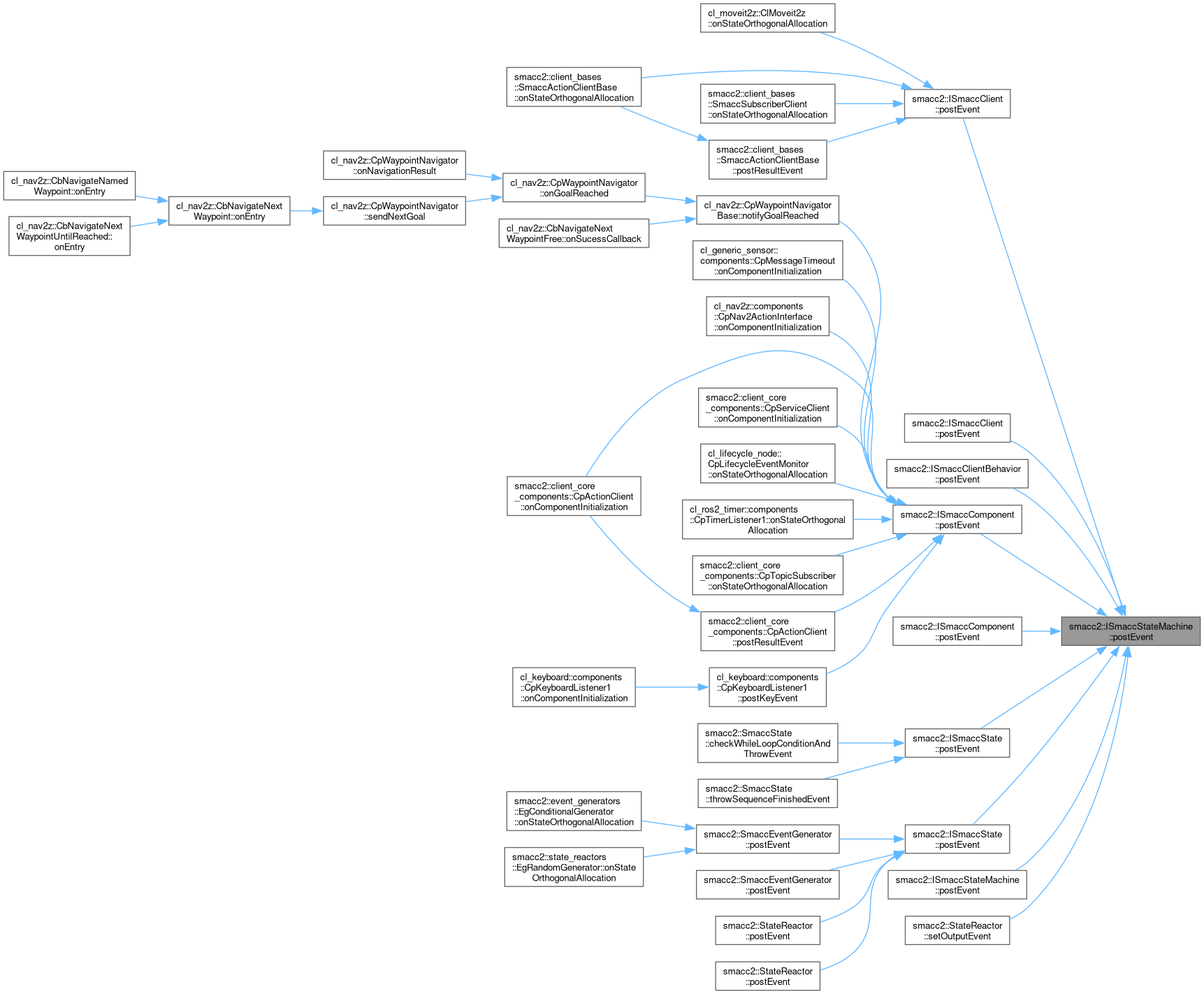
Referenced by smacc2::ISmaccClient::postEvent(), smacc2::ISmaccClient::postEvent(), smacc2::ISmaccClientBehavior::postEvent(), smacc2::ISmaccComponent::postEvent(), smacc2::ISmaccComponent::postEvent(), smacc2::ISmaccState::postEvent(), smacc2::ISmaccState::postEvent(), postEvent(), and smacc2::StateReactor::setOutputEvent().
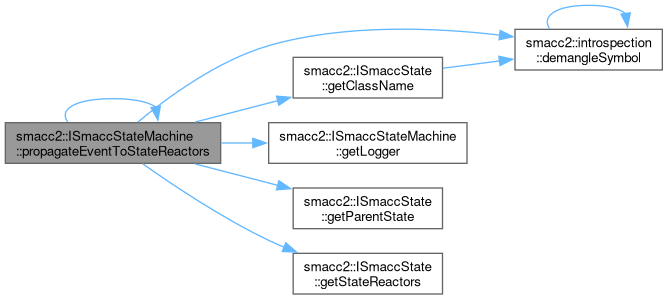
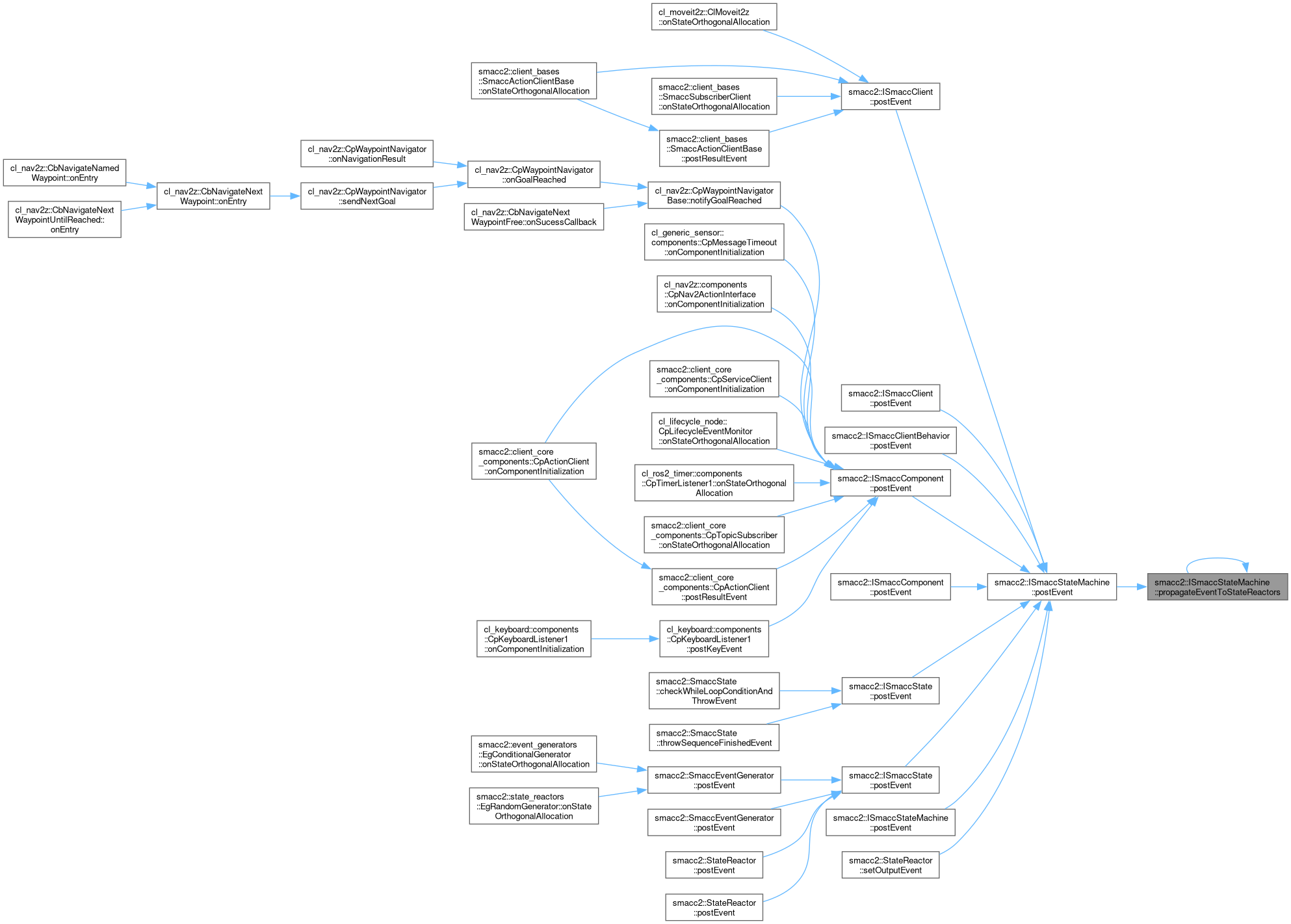
◆ propagateEventToStateReactors()
|
private |
Definition at line 691 of file smacc_state_machine_impl.hpp.
References smacc2::introspection::demangleSymbol(), smacc2::ISmaccState::getClassName(), getLogger(), smacc2::ISmaccState::getParentState(), smacc2::ISmaccState::getStateReactors(), and propagateEventToStateReactors().
Referenced by postEvent(), and propagateEventToStateReactors().
◆ publishTransition()
| void smacc2::ISmaccStateMachine::publishTransition | ( | const SmaccTransitionInfo & | transitionInfo | ) |
Definition at line 139 of file smacc_state_machine.cpp.
References nh_, smacc2::introspection::transitionInfoToMsg(), transitionLogHistory_, and transitionLogPub_.
Referenced by smacc2::SmaccStateMachineBase< DerivedStateMachine, InitialStateType >::initiate_impl(), and smacc2::ISmaccState::notifyTransitionFromTransitionTypeInfo().


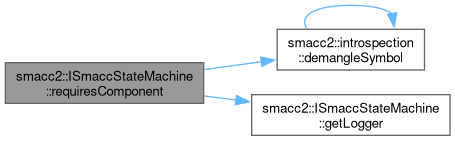
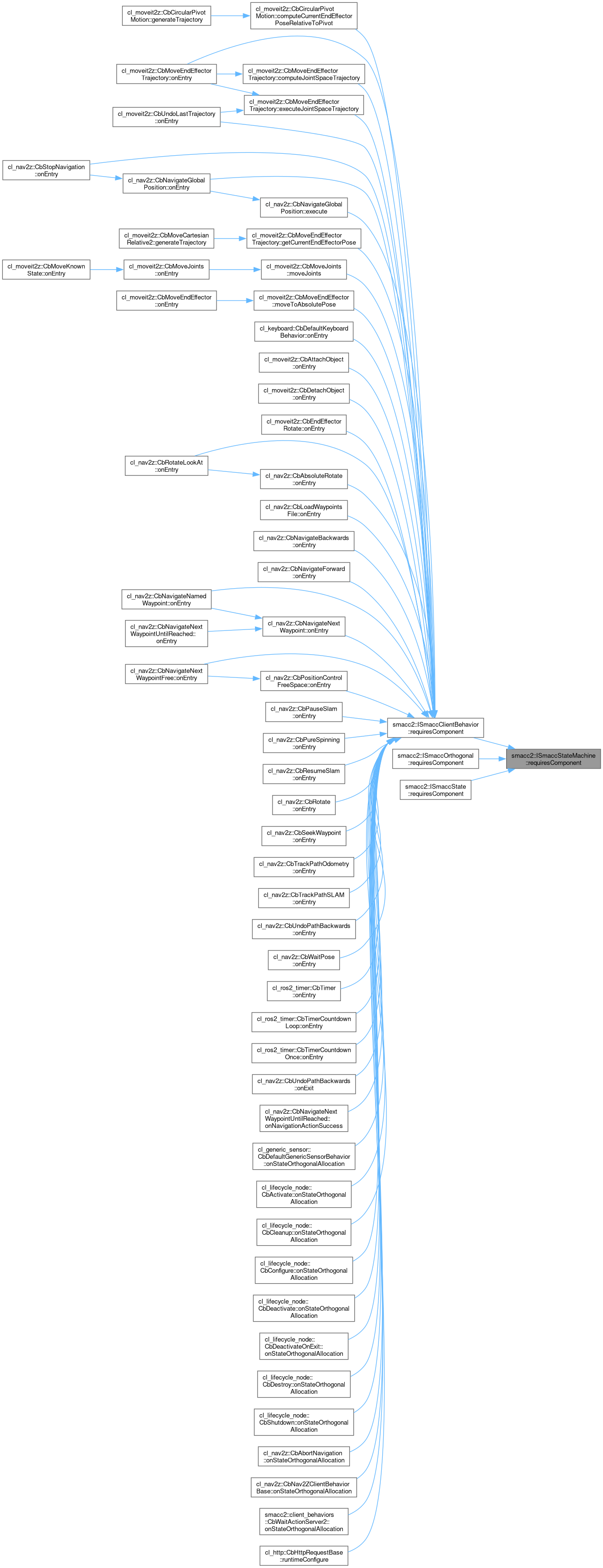
◆ requiresComponent()
| void smacc2::ISmaccStateMachine::requiresComponent | ( | SmaccComponentType *& | storage, |
| ComponentRequirement | requirementType ) |
Definition at line 117 of file smacc_state_machine_impl.hpp.
References smacc2::introspection::demangleSymbol(), getLogger(), smacc2::HARD, m_mutex_, and orthogonals_.
Referenced by smacc2::ISmaccClientBehavior::requiresComponent(), smacc2::ISmaccOrthogonal::requiresComponent(), and smacc2::ISmaccState::requiresComponent().
◆ reset()
|
virtual |
Reimplemented in smacc2::SmaccStateMachineBase< DerivedStateMachine, InitialStateType >.
Definition at line 90 of file smacc_state_machine.cpp.
Referenced by smacc2::SmaccStateMachineBase< DerivedStateMachine, InitialStateType >::reset().

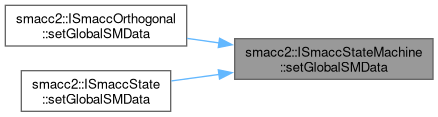
◆ setGlobalSMData()
| void smacc2::ISmaccStateMachine::setGlobalSMData | ( | std::string | name, |
| T | value ) |
Definition at line 245 of file smacc_state_machine_impl.hpp.
References globalData_, m_mutex_, and updateStatusMessage().
Referenced by smacc2::ISmaccOrthogonal::setGlobalSMData(), and smacc2::ISmaccState::setGlobalSMData().

◆ state_machine_visualization()
| void smacc2::ISmaccStateMachine::state_machine_visualization | ( | ) |
Definition at line 195 of file smacc_state_machine.cpp.
References m_mutex_, nh_, stateMachineInfo_, stateMachinePub_, stateMachineStatusPub_, and status_msg_.
Referenced by onInitialized().

◆ stop()
|
virtual |
Reimplemented in smacc2::SmaccStateMachineBase< DerivedStateMachine, InitialStateType >.
Definition at line 92 of file smacc_state_machine.cpp.
Referenced by smacc2::SmaccStateMachineBase< DerivedStateMachine, InitialStateType >::stop().

◆ unlockStateMachine()
|
private |
Definition at line 217 of file smacc_state_machine.cpp.
Referenced by notifyOnStateExited().

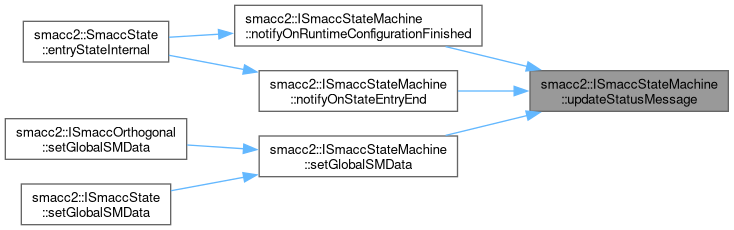
◆ updateStatusMessage()
|
private |
Definition at line 102 of file smacc_state_machine.cpp.
References currentStateInfo_, smacc2::DEBUG, globalData_, m_mutex_, nh_, runMode_, stateMachineStatusPub_, and status_msg_.
Referenced by notifyOnRuntimeConfigurationFinished(), notifyOnStateEntryEnd(), and setGlobalSMData().
Friends And Related Symbol Documentation
◆ ISmaccState
|
friend |
Definition at line 231 of file smacc_state_machine.hpp.
◆ SignalDetector
|
friend |
Definition at line 232 of file smacc_state_machine.hpp.
Member Data Documentation
◆ currentState_
|
protected |
Definition at line 189 of file smacc_state_machine.hpp.
Referenced by getCurrentState(), notifyOnRuntimeConfigurationFinished(), notifyOnStateEntryEnd(), notifyOnStateEntryStart(), notifyOnStateExited(), and postEvent().
◆ currentStateInfo_
|
protected |
Definition at line 191 of file smacc_state_machine.hpp.
Referenced by getCurrentStateInfo(), notifyOnStateEntryStart(), and updateStatusMessage().
◆ eventQueueMutex_
|
private |
Definition at line 203 of file smacc_state_machine.hpp.
Referenced by postEvent().
◆ eventsLogPub_
|
protected |
Definition at line 183 of file smacc_state_machine.hpp.
Referenced by initializeROS(), and postEvent().
◆ globalData_
|
private |
Definition at line 210 of file smacc_state_machine.hpp.
Referenced by getGlobalSMData(), setGlobalSMData(), and updateStatusMessage().
◆ m_mutex_
|
private |
Definition at line 202 of file smacc_state_machine.hpp.
Referenced by createOrthogonal(), createSignalConnection(), getGlobalSMData(), getMutex(), getOrthogonal(), lockStateMachine(), notifyOnRuntimeConfigurationFinished(), notifyOnStateEntryEnd(), notifyOnStateEntryStart(), smacc2::SignalDetector::pollOnce(), requiresComponent(), setGlobalSMData(), state_machine_visualization(), unlockStateMachine(), and updateStatusMessage().
◆ nh_
|
protected |
Definition at line 176 of file smacc_state_machine.hpp.
Referenced by disconnectSmaccSignalObject(), getLogger(), getNode(), getTransitionLogHistory(), initializeROS(), ISmaccStateMachine(), lockStateMachine(), onInitialized(), publishTransition(), state_machine_visualization(), unlockStateMachine(), updateStatusMessage(), and ~ISmaccStateMachine().
◆ orthogonals_
|
protected |
Definition at line 196 of file smacc_state_machine.hpp.
Referenced by createOrthogonal(), getOrthogonal(), getOrthogonals(), notifyOnRuntimeConfigurationFinished(), notifyOnStateEntryEnd(), notifyOnStateEntryStart(), notifyOnStateExited(), notifyOnStateExiting(), and requiresComponent().
◆ runMode_
|
private |
Definition at line 215 of file smacc_state_machine.hpp.
Referenced by ISmaccStateMachine(), and updateStatusMessage().
◆ signalDetector_
|
private |
Definition at line 218 of file smacc_state_machine.hpp.
Referenced by initializeROS(), ISmaccStateMachine(), notifyOnRuntimeConfigurationFinished(), notifyOnStateExited(), and postEvent().
◆ stateCallbackConnections
|
private |
Definition at line 207 of file smacc_state_machine.hpp.
Referenced by createSignalConnection(), disconnectSmaccSignalObject(), and notifyOnStateExited().
◆ stateMachineCurrentAction
|
private |
Definition at line 205 of file smacc_state_machine.hpp.
Referenced by notifyOnRuntimeConfigurationFinished(), notifyOnRuntimeConfigured(), notifyOnStateEntryEnd(), notifyOnStateExited(), notifyOnStateExiting(), smacc2::SignalDetector::pollOnce(), and postEvent().
◆ stateMachineInfo_
|
protected |
Definition at line 199 of file smacc_state_machine.hpp.
Referenced by buildStateMachineInfo(), getStateMachineInfo(), smacc2::SmaccStateMachineBase< DerivedStateMachine, InitialStateType >::initiate_impl(), notifyOnStateEntryStart(), and state_machine_visualization().
◆ stateMachinePub_
|
protected |
Definition at line 179 of file smacc_state_machine.hpp.
Referenced by initializeROS(), and state_machine_visualization().
◆ stateMachineStatusPub_
|
protected |
Definition at line 180 of file smacc_state_machine.hpp.
Referenced by initializeROS(), state_machine_visualization(), and updateStatusMessage().
◆ stateSeqCounter_
|
private |
Definition at line 220 of file smacc_state_machine.hpp.
Referenced by getCurrentStateCounter(), and notifyOnStateEntryStart().
◆ status_msg_
|
protected |
Definition at line 193 of file smacc_state_machine.hpp.
Referenced by state_machine_visualization(), and updateStatusMessage().
◆ timer_
|
protected |
Definition at line 178 of file smacc_state_machine.hpp.
Referenced by onInitialized().
◆ transitionHistoryService_
|
protected |
Definition at line 185 of file smacc_state_machine.hpp.
Referenced by initializeROS().
◆ transitionLogHistory_
|
private |
Definition at line 213 of file smacc_state_machine.hpp.
Referenced by getTransitionLogHistory(), and publishTransition().
◆ transitionLogPub_
|
protected |
Definition at line 181 of file smacc_state_machine.hpp.
Referenced by initializeROS(), and publishTransition().
The documentation for this class was generated from the following files:
- smacc2/include/smacc2/smacc_state_machine.hpp
- smacc2/include/smacc2/impl/smacc_state_machine_impl.hpp
- smacc2/src/smacc2/smacc_state_machine.cpp
Generated by