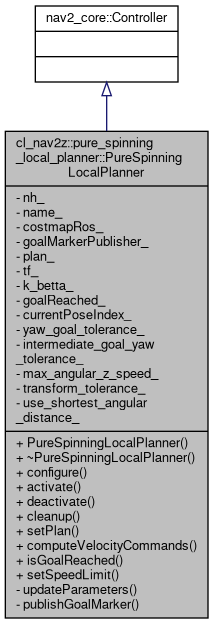
#include <pure_spinning_local_planner.hpp>
Public Member Functions | |
| PureSpinningLocalPlanner () | |
| virtual | ~PureSpinningLocalPlanner () |
| void | configure (const rclcpp_lifecycle::LifecycleNode::WeakPtr &parent, std::string name, const std::shared_ptr< tf2_ros::Buffer > &tf, const std::shared_ptr< nav2_costmap_2d::Costmap2DROS > &costmap_ros) override |
| void | activate () override |
| void | deactivate () override |
| void | cleanup () override |
| void | setPlan (const nav_msgs::msg::Path &path) override |
| nav2_core setPlan - Sets the global plan More... | |
| virtual geometry_msgs::msg::TwistStamped | computeVelocityCommands (const geometry_msgs::msg::PoseStamped &pose, const geometry_msgs::msg::Twist &velocity, nav2_core::GoalChecker *goal_checker) override |
| nav2_core computeVelocityCommands - calculates the best command given the current pose and velocity More... | |
| bool | isGoalReached () |
| virtual void | setSpeedLimit (const double &speed_limit, const bool &percentage) override |
Private Member Functions | |
| void | updateParameters () |
| void | publishGoalMarker (double x, double y, double phi) |
Private Attributes | |
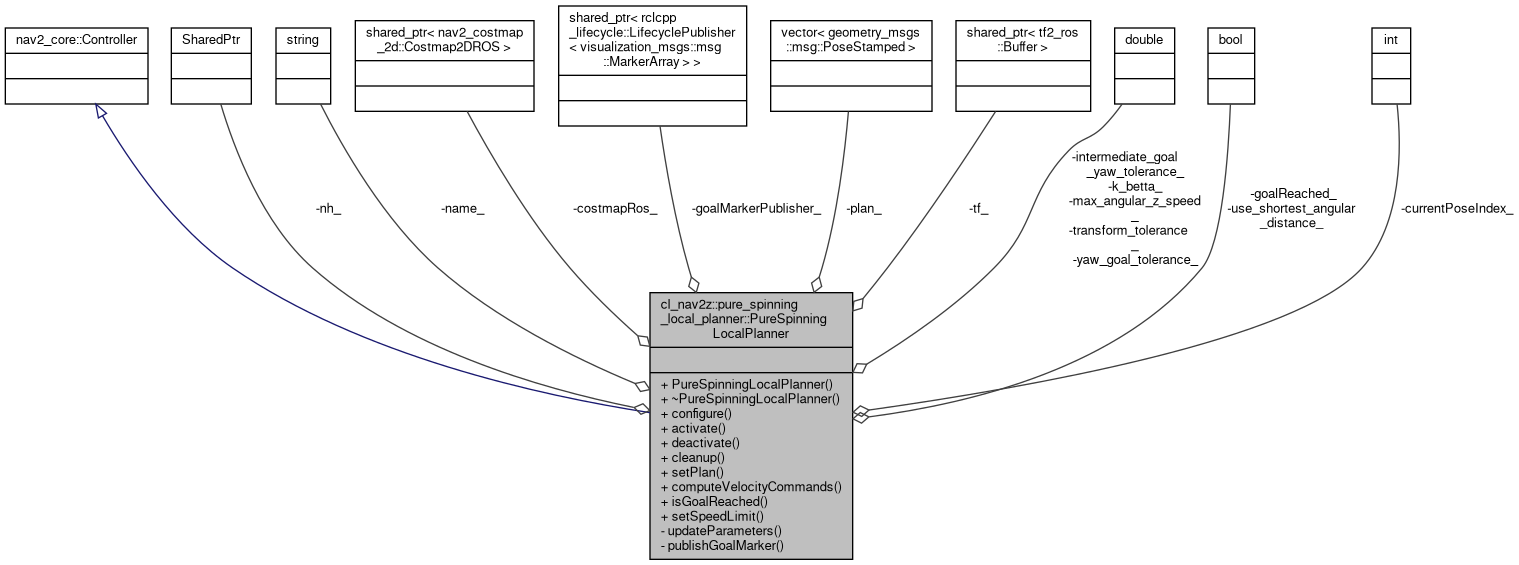
| nav2_util::LifecycleNode::SharedPtr | nh_ |
| std::string | name_ |
| std::shared_ptr< nav2_costmap_2d::Costmap2DROS > | costmapRos_ |
| std::shared_ptr< rclcpp_lifecycle::LifecyclePublisher< visualization_msgs::msg::MarkerArray > > | goalMarkerPublisher_ |
| std::vector< geometry_msgs::msg::PoseStamped > | plan_ |
| std::shared_ptr< tf2_ros::Buffer > | tf_ |
| double | k_betta_ |
| bool | goalReached_ |
| int | currentPoseIndex_ |
| rad | yaw_goal_tolerance_ |
| rad | intermediate_goal_yaw_tolerance_ |
| rad_s | max_angular_z_speed_ |
| double | transform_tolerance_ |
| bool | use_shortest_angular_distance_ |
Detailed Description
Definition at line 41 of file pure_spinning_local_planner.hpp.
Constructor & Destructor Documentation
◆ PureSpinningLocalPlanner()
| cl_nav2z::pure_spinning_local_planner::PureSpinningLocalPlanner::PureSpinningLocalPlanner | ( | ) |
Definition at line 35 of file pure_spinning_local_planner.cpp.
◆ ~PureSpinningLocalPlanner()
|
virtual |
Definition at line 37 of file pure_spinning_local_planner.cpp.
Member Function Documentation
◆ activate()
|
override |
Definition at line 39 of file pure_spinning_local_planner.cpp.
References nh_, and updateParameters().

◆ cleanup()
|
override |
Definition at line 47 of file pure_spinning_local_planner.cpp.
References currentPoseIndex_, plan_, and yaw_goal_tolerance_.
◆ computeVelocityCommands()
|
overridevirtual |
nav2_core computeVelocityCommands - calculates the best command given the current pose and velocity
It is presumed that the global plan is already set.
This is mostly a wrapper for the protected computeVelocityCommands function which has additional debugging info.
- Parameters
-
pose Current robot pose velocity Current robot velocity
- Returns
- The best command for the robot to drive
Definition at line 88 of file pure_spinning_local_planner.cpp.
References currentPoseIndex_, goalReached_, intermediate_goal_yaw_tolerance_, k_betta_, max_angular_z_speed_, nh_, plan_, updateParameters(), use_shortest_angular_distance_, and yaw_goal_tolerance_.

◆ configure()
|
override |
Definition at line 54 of file pure_spinning_local_planner.cpp.
References costmapRos_, declareOrSet(), intermediate_goal_yaw_tolerance_, k_betta_, max_angular_z_speed_, name_, nh_, tf_, transform_tolerance_, use_shortest_angular_distance_, and yaw_goal_tolerance_.

◆ deactivate()
|
override |
Definition at line 45 of file pure_spinning_local_planner.cpp.
◆ isGoalReached()
| bool cl_nav2z::pure_spinning_local_planner::PureSpinningLocalPlanner::isGoalReached | ( | ) |
◆ publishGoalMarker()
|
private |
◆ setPlan()
|
override |
nav2_core setPlan - Sets the global plan
- Parameters
-
path The global plan
Definition at line 192 of file pure_spinning_local_planner.cpp.
References costmapRos_, currentPoseIndex_, goalReached_, nh_, plan_, tf_, and transform_tolerance_.
◆ setSpeedLimit()
|
overridevirtual |
Definition at line 181 of file pure_spinning_local_planner.cpp.
References nh_.
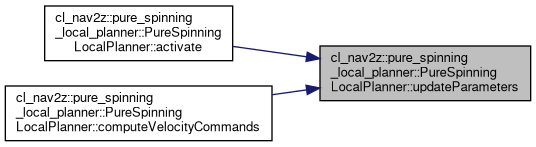
◆ updateParameters()
|
private |
Definition at line 79 of file pure_spinning_local_planner.cpp.
References intermediate_goal_yaw_tolerance_, k_betta_, max_angular_z_speed_, name_, nh_, transform_tolerance_, cl_nav2z::pure_spinning_local_planner::tryGetOrSet(), and use_shortest_angular_distance_.
Referenced by activate(), and computeVelocityCommands().

Member Data Documentation
◆ costmapRos_
|
private |
Definition at line 90 of file pure_spinning_local_planner.hpp.
Referenced by configure(), and setPlan().
◆ currentPoseIndex_
|
private |
Definition at line 101 of file pure_spinning_local_planner.hpp.
Referenced by cleanup(), computeVelocityCommands(), and setPlan().
◆ goalMarkerPublisher_
|
private |
Definition at line 93 of file pure_spinning_local_planner.hpp.
◆ goalReached_
|
private |
Definition at line 100 of file pure_spinning_local_planner.hpp.
Referenced by computeVelocityCommands(), isGoalReached(), and setPlan().
◆ intermediate_goal_yaw_tolerance_
|
private |
Definition at line 103 of file pure_spinning_local_planner.hpp.
Referenced by computeVelocityCommands(), configure(), and updateParameters().
◆ k_betta_
|
private |
Definition at line 99 of file pure_spinning_local_planner.hpp.
Referenced by computeVelocityCommands(), configure(), and updateParameters().
◆ max_angular_z_speed_
|
private |
Definition at line 104 of file pure_spinning_local_planner.hpp.
Referenced by computeVelocityCommands(), configure(), and updateParameters().
◆ name_
|
private |
Definition at line 87 of file pure_spinning_local_planner.hpp.
Referenced by configure(), and updateParameters().
◆ nh_
|
private |
Definition at line 86 of file pure_spinning_local_planner.hpp.
Referenced by activate(), computeVelocityCommands(), configure(), setPlan(), setSpeedLimit(), and updateParameters().
◆ plan_
|
private |
Definition at line 95 of file pure_spinning_local_planner.hpp.
Referenced by cleanup(), computeVelocityCommands(), and setPlan().
◆ tf_
|
private |
Definition at line 97 of file pure_spinning_local_planner.hpp.
Referenced by configure(), and setPlan().
◆ transform_tolerance_
|
private |
Definition at line 105 of file pure_spinning_local_planner.hpp.
Referenced by configure(), setPlan(), and updateParameters().
◆ use_shortest_angular_distance_
|
private |
Definition at line 106 of file pure_spinning_local_planner.hpp.
Referenced by computeVelocityCommands(), configure(), and updateParameters().
◆ yaw_goal_tolerance_
|
private |
Definition at line 102 of file pure_spinning_local_planner.hpp.
Referenced by cleanup(), computeVelocityCommands(), and configure().
The documentation for this class was generated from the following files:
- smacc2_client_library/nav2z_client/custom_planners/pure_spinning_local_planner/include/pure_spinning_local_planner/pure_spinning_local_planner.hpp
- smacc2_client_library/nav2z_client/custom_planners/pure_spinning_local_planner/src/pure_spinning_local_planner/pure_spinning_local_planner.cpp