Generic ROS2 service client component for SMACC2. More...
#include <cp_service_client.hpp>
Public Types | |
| using | Client = rclcpp::Client<ServiceType> |
| using | Request = typename ServiceType::Request |
| using | Response = typename ServiceType::Response |
| using | SharedRequest = typename Request::SharedPtr |
| using | SharedResponse = typename Response::SharedPtr |
| using | SharedFuture = typename rclcpp::Client<ServiceType>::SharedFuture |
Public Member Functions | |
| CpServiceClient ()=default | |
| Default constructor. | |
| CpServiceClient (const std::string &serviceName) | |
| Constructor with service name. | |
| CpServiceClient (const std::string &serviceName, std::chrono::milliseconds serviceTimeout) | |
| Constructor with service name and timeout. | |
| virtual | ~CpServiceClient ()=default |
| SharedFuture | sendRequest (SharedRequest request) |
| Send a service request asynchronously. | |
| SharedResponse | sendRequestSync (SharedRequest request) |
| Send a service request synchronously (blocking) | |
| bool | isServiceReady () const |
| Check if the service server is ready. | |
| void | waitForService () |
| Wait for the service to become available. | |
| void | onInitialize () override |
| Component initialization - creates the ROS2 service client. | |
| template<typename TOrthogonal , typename TSourceObject > | |
| void | onComponentInitialization () |
| Configure event posting with proper template parameters. | |
| template<typename T > | |
| smacc2::SmaccSignalConnection | onResponse (void(T::*callback)(const SharedResponse &), T *object) |
| Helper method to connect a callback to the response signal. | |
| template<typename T > | |
| smacc2::SmaccSignalConnection | onRequestSent (void(T::*callback)(), T *object) |
| Helper method to connect a callback to the request sent signal. | |
| template<typename T > | |
| smacc2::SmaccSignalConnection | onFailure (void(T::*callback)(), T *object) |
| Helper method to connect a callback to the failure signal. | |
| std::shared_ptr< Client > | getServiceClient () const |
| Get the underlying ROS2 service client. | |
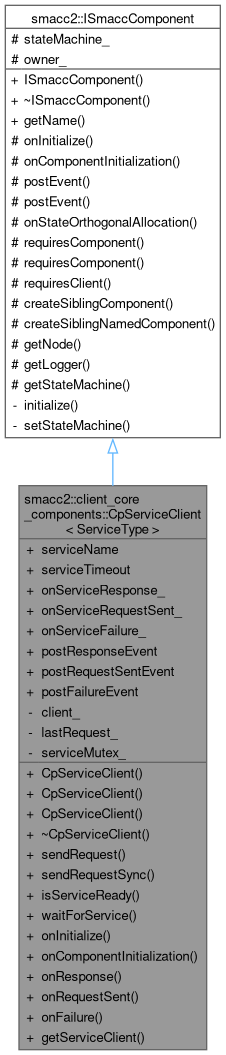
 Public Member Functions inherited from smacc2::ISmaccComponent Public Member Functions inherited from smacc2::ISmaccComponent | |
| ISmaccComponent () | |
| virtual | ~ISmaccComponent () |
| virtual std::string | getName () const |
Public Attributes | |
| std::optional< std::string > | serviceName |
| std::optional< std::chrono::milliseconds > | serviceTimeout |
| smacc2::SmaccSignal< void(const SharedResponse &)> | onServiceResponse_ |
| smacc2::SmaccSignal< void()> | onServiceRequestSent_ |
| smacc2::SmaccSignal< void()> | onServiceFailure_ |
| std::function< void(const SharedResponse &)> | postResponseEvent |
| std::function< void()> | postRequestSentEvent |
| std::function< void()> | postFailureEvent |
Private Attributes | |
| std::shared_ptr< Client > | client_ = nullptr |
| std::optional< SharedFuture > | lastRequest_ |
| std::mutex | serviceMutex_ |
Additional Inherited Members | |
| Protected Member Functions inherited from smacc2::ISmaccComponent | |
| template<typename TOrthogonal , typename TClient > | |
| void | onComponentInitialization () |
| template<typename EventType > | |
| void | postEvent (const EventType &ev) |
| template<typename EventType > | |
| void | postEvent () |
| template<typename TOrthogonal , typename TSourceObject > | |
| void | onStateOrthogonalAllocation () |
| template<typename TComponent > | |
| void | requiresComponent (TComponent *&requiredComponentStorage, ComponentRequirement requirementType=ComponentRequirement::SOFT) |
| template<typename TComponent > | |
| void | requiresComponent (std::string name, TComponent *&requiredComponentStorage, ComponentRequirement requirementType=ComponentRequirement::SOFT) |
| template<typename TClient > | |
| void | requiresClient (TClient *&requiredClientStorage) |
| template<typename SmaccComponentType , typename TOrthogonal , typename TClient , typename... TArgs> | |
| SmaccComponentType * | createSiblingComponent (TArgs... targs) |
| template<typename SmaccComponentType , typename TOrthogonal , typename TClient , typename... TArgs> | |
| SmaccComponentType * | createSiblingNamedComponent (std::string name, TArgs... targs) |
| rclcpp::Node::SharedPtr | getNode () |
| rclcpp::Logger | getLogger () const |
| ISmaccStateMachine * | getStateMachine () |
| Protected Attributes inherited from smacc2::ISmaccComponent | |
| ISmaccStateMachine * | stateMachine_ |
| ISmaccClient * | owner_ |
Detailed Description
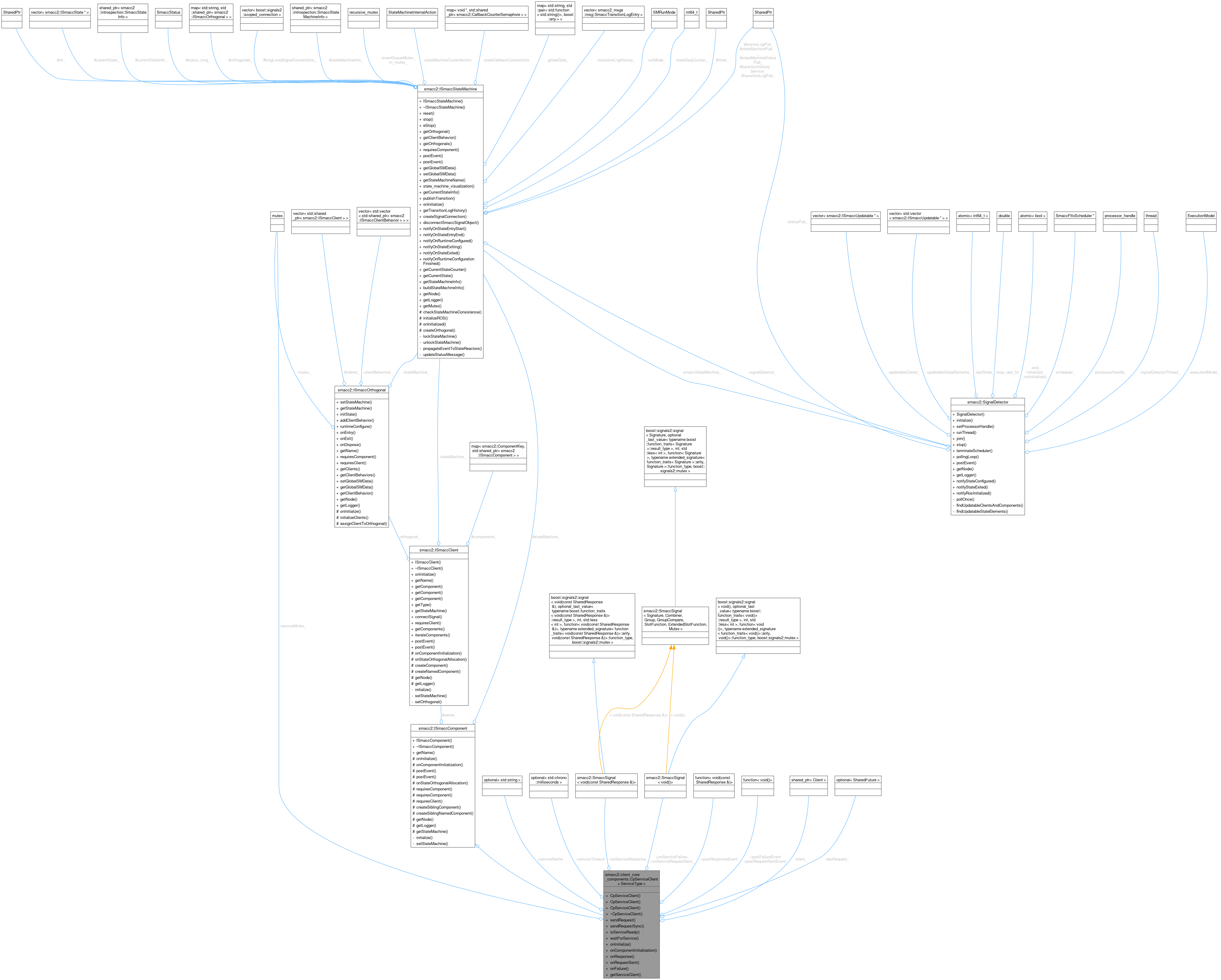
class smacc2::client_core_components::CpServiceClient< ServiceType >
Generic ROS2 service client component for SMACC2.
CpServiceClient provides a reusable service client component that can be used by any SMACC2 client library requiring ROS2 service communication. It follows the same pattern as CpActionClient, providing signals, event posting, and thread-safe service call management.
Key Features:
- Template-based for type safety with any ROS2 service type
- SMACC2 signal integration for event-driven responses
- Automatic SMACC2 event posting via template configuration
- Both synchronous and asynchronous service call support
- Thread-safe service call execution
- Service availability checking and waiting
Usage Example:
- Template Parameters
-
ServiceType ROS2 service type (e.g., std_srvs::srv::SetBool)
Definition at line 67 of file cp_service_client.hpp.
Member Typedef Documentation
◆ Client
| using smacc2::client_core_components::CpServiceClient< ServiceType >::Client = rclcpp::Client<ServiceType> |
Definition at line 71 of file cp_service_client.hpp.
◆ Request
| using smacc2::client_core_components::CpServiceClient< ServiceType >::Request = typename ServiceType::Request |
Definition at line 72 of file cp_service_client.hpp.
◆ Response
| using smacc2::client_core_components::CpServiceClient< ServiceType >::Response = typename ServiceType::Response |
Definition at line 73 of file cp_service_client.hpp.
◆ SharedFuture
| using smacc2::client_core_components::CpServiceClient< ServiceType >::SharedFuture = typename rclcpp::Client<ServiceType>::SharedFuture |
Definition at line 76 of file cp_service_client.hpp.
◆ SharedRequest
| using smacc2::client_core_components::CpServiceClient< ServiceType >::SharedRequest = typename Request::SharedPtr |
Definition at line 74 of file cp_service_client.hpp.
◆ SharedResponse
| using smacc2::client_core_components::CpServiceClient< ServiceType >::SharedResponse = typename Response::SharedPtr |
Definition at line 75 of file cp_service_client.hpp.
Constructor & Destructor Documentation
◆ CpServiceClient() [1/3]
|
default |
Default constructor.
◆ CpServiceClient() [2/3]
|
inline |
Constructor with service name.
- Parameters
-
serviceName ROS2 service name (e.g., "/my_node/my_service")
Definition at line 105 of file cp_service_client.hpp.
◆ CpServiceClient() [3/3]
|
inline |
Constructor with service name and timeout.
- Parameters
-
serviceName ROS2 service name serviceTimeout Maximum time to wait for service response
Definition at line 112 of file cp_service_client.hpp.
◆ ~CpServiceClient()
|
virtualdefault |
Member Function Documentation
◆ getServiceClient()
|
inline |
Get the underlying ROS2 service client.
Provides access to the raw rclcpp::Client for advanced usage scenarios.
- Returns
- Shared pointer to the rclcpp service client
Definition at line 370 of file cp_service_client.hpp.
References smacc2::client_core_components::CpServiceClient< ServiceType >::client_.
◆ isServiceReady()
|
inline |
Check if the service server is ready.
- Returns
- true if service is available, false otherwise
Definition at line 223 of file cp_service_client.hpp.
References smacc2::client_core_components::CpServiceClient< ServiceType >::client_.
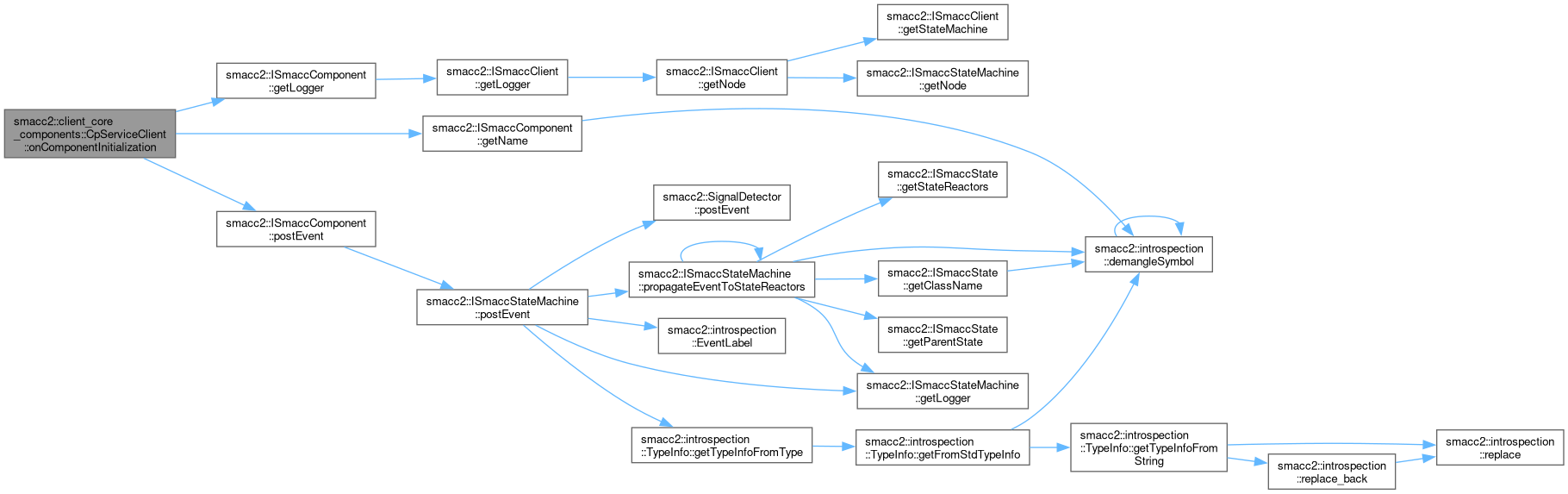
◆ onComponentInitialization()
|
inline |
Configure event posting with proper template parameters.
This method is called during component allocation to set up the event posting lambdas with the correct orthogonal and source object types. This enables type-safe event posting to the state machine.
- Template Parameters
-
TOrthogonal The orthogonal type that owns this component TSourceObject The source object type (typically the client)
Definition at line 292 of file cp_service_client.hpp.
References smacc2::ISmaccComponent::getLogger(), smacc2::ISmaccComponent::getName(), smacc2::ISmaccComponent::postEvent(), smacc2::client_core_components::CpServiceClient< ServiceType >::postFailureEvent, smacc2::client_core_components::CpServiceClient< ServiceType >::postRequestSentEvent, and smacc2::client_core_components::CpServiceClient< ServiceType >::postResponseEvent.
◆ onFailure()
|
inline |
Helper method to connect a callback to the failure signal.
- Template Parameters
-
T Type of the callback object
- Parameters
-
callback Member function pointer to call on failure object Object instance that owns the callback
- Returns
- Signal connection handle
Definition at line 358 of file cp_service_client.hpp.
References smacc2::ISmaccStateMachine::createSignalConnection(), and smacc2::ISmaccComponent::getStateMachine().

◆ onInitialize()
|
inlineoverridevirtual |
Component initialization - creates the ROS2 service client.
Called by SMACC2 framework during component initialization. Creates the underlying rclcpp::Client for the specified service.
Reimplemented from smacc2::ISmaccComponent.
Definition at line 263 of file cp_service_client.hpp.
References smacc2::client_core_components::CpServiceClient< ServiceType >::client_, smacc2::ISmaccComponent::getLogger(), smacc2::ISmaccComponent::getName(), smacc2::ISmaccComponent::getNode(), and smacc2::client_core_components::CpServiceClient< ServiceType >::serviceName.

◆ onRequestSent()
|
inline |
Helper method to connect a callback to the request sent signal.
- Template Parameters
-
T Type of the callback object
- Parameters
-
callback Member function pointer to call when request is sent object Object instance that owns the callback
- Returns
- Signal connection handle
Definition at line 344 of file cp_service_client.hpp.
References smacc2::ISmaccStateMachine::createSignalConnection(), and smacc2::ISmaccComponent::getStateMachine().

◆ onResponse()
|
inline |
Helper method to connect a callback to the response signal.
Provides a convenient way to connect member functions to the service response signal with proper lifetime management.
- Template Parameters
-
T Type of the callback object
- Parameters
-
callback Member function pointer to call on response object Object instance that owns the callback
- Returns
- Signal connection handle
Definition at line 330 of file cp_service_client.hpp.
References smacc2::ISmaccStateMachine::createSignalConnection(), and smacc2::ISmaccComponent::getStateMachine().

◆ sendRequest()
|
inline |
Send a service request asynchronously.
Sends a service request and returns a future. The caller can wait on the future or let the component handle the response via signals/events.
- Parameters
-
request Shared pointer to the service request
- Returns
- SharedFuture Future for the service response
Definition at line 128 of file cp_service_client.hpp.
References smacc2::client_core_components::CpServiceClient< ServiceType >::client_, smacc2::ISmaccComponent::getLogger(), smacc2::ISmaccComponent::getName(), smacc2::client_core_components::CpServiceClient< ServiceType >::lastRequest_, smacc2::client_core_components::CpServiceClient< ServiceType >::onServiceRequestSent_, smacc2::client_core_components::CpServiceClient< ServiceType >::postRequestSentEvent, and smacc2::client_core_components::CpServiceClient< ServiceType >::serviceMutex_.
Referenced by smacc2::client_core_components::CpServiceClient< ServiceType >::sendRequestSync().


◆ sendRequestSync()
|
inline |
Send a service request synchronously (blocking)
Sends a service request and blocks until the response is received or a timeout occurs. This is a convenience method that wraps sendRequest() with a blocking wait.
- Parameters
-
request Shared pointer to the service request
- Returns
- SharedResponse Response from the service
- Exceptions
-
std::runtime_error if service call fails or times out
Definition at line 170 of file cp_service_client.hpp.
References smacc2::ISmaccComponent::getLogger(), smacc2::ISmaccComponent::getName(), smacc2::client_core_components::CpServiceClient< ServiceType >::onServiceFailure_, smacc2::client_core_components::CpServiceClient< ServiceType >::onServiceResponse_, smacc2::client_core_components::CpServiceClient< ServiceType >::postFailureEvent, smacc2::client_core_components::CpServiceClient< ServiceType >::postResponseEvent, smacc2::client_core_components::CpServiceClient< ServiceType >::sendRequest(), and smacc2::client_core_components::CpServiceClient< ServiceType >::serviceTimeout.

◆ waitForService()
|
inline |
Wait for the service to become available.
Blocks until the service server is ready to accept requests. Uses a default timeout or the configured serviceTimeout.
Definition at line 231 of file cp_service_client.hpp.
References smacc2::client_core_components::CpServiceClient< ServiceType >::client_, smacc2::ISmaccComponent::getLogger(), smacc2::ISmaccComponent::getName(), and smacc2::client_core_components::CpServiceClient< ServiceType >::serviceTimeout.

Member Data Documentation
◆ client_
|
private |
Definition at line 373 of file cp_service_client.hpp.
Referenced by smacc2::client_core_components::CpServiceClient< ServiceType >::getServiceClient(), smacc2::client_core_components::CpServiceClient< ServiceType >::isServiceReady(), smacc2::client_core_components::CpServiceClient< ServiceType >::onInitialize(), smacc2::client_core_components::CpServiceClient< ServiceType >::sendRequest(), and smacc2::client_core_components::CpServiceClient< ServiceType >::waitForService().
◆ lastRequest_
|
private |
Definition at line 374 of file cp_service_client.hpp.
Referenced by smacc2::client_core_components::CpServiceClient< ServiceType >::sendRequest().
◆ onServiceFailure_
| smacc2::SmaccSignal<void()> smacc2::client_core_components::CpServiceClient< ServiceType >::onServiceFailure_ |
Definition at line 87 of file cp_service_client.hpp.
Referenced by smacc2::client_core_components::CpServiceClient< ServiceType >::sendRequestSync().
◆ onServiceRequestSent_
| smacc2::SmaccSignal<void()> smacc2::client_core_components::CpServiceClient< ServiceType >::onServiceRequestSent_ |
Definition at line 86 of file cp_service_client.hpp.
Referenced by smacc2::client_core_components::CpServiceClient< ServiceType >::sendRequest().
◆ onServiceResponse_
| smacc2::SmaccSignal<void(const SharedResponse &)> smacc2::client_core_components::CpServiceClient< ServiceType >::onServiceResponse_ |
Definition at line 85 of file cp_service_client.hpp.
Referenced by smacc2::client_core_components::CpServiceClient< ServiceType >::sendRequestSync().
◆ postFailureEvent
| std::function<void()> smacc2::client_core_components::CpServiceClient< ServiceType >::postFailureEvent |
Definition at line 94 of file cp_service_client.hpp.
Referenced by smacc2::client_core_components::CpServiceClient< ServiceType >::onComponentInitialization(), and smacc2::client_core_components::CpServiceClient< ServiceType >::sendRequestSync().
◆ postRequestSentEvent
| std::function<void()> smacc2::client_core_components::CpServiceClient< ServiceType >::postRequestSentEvent |
Definition at line 93 of file cp_service_client.hpp.
Referenced by smacc2::client_core_components::CpServiceClient< ServiceType >::onComponentInitialization(), and smacc2::client_core_components::CpServiceClient< ServiceType >::sendRequest().
◆ postResponseEvent
| std::function<void(const SharedResponse &)> smacc2::client_core_components::CpServiceClient< ServiceType >::postResponseEvent |
Definition at line 92 of file cp_service_client.hpp.
Referenced by smacc2::client_core_components::CpServiceClient< ServiceType >::onComponentInitialization(), and smacc2::client_core_components::CpServiceClient< ServiceType >::sendRequestSync().
◆ serviceMutex_
|
private |
Definition at line 375 of file cp_service_client.hpp.
Referenced by smacc2::client_core_components::CpServiceClient< ServiceType >::sendRequest().
◆ serviceName
| std::optional<std::string> smacc2::client_core_components::CpServiceClient< ServiceType >::serviceName |
Definition at line 79 of file cp_service_client.hpp.
Referenced by smacc2::client_core_components::CpServiceClient< ServiceType >::onInitialize().
◆ serviceTimeout
| std::optional<std::chrono::milliseconds> smacc2::client_core_components::CpServiceClient< ServiceType >::serviceTimeout |
Definition at line 80 of file cp_service_client.hpp.
Referenced by smacc2::client_core_components::CpServiceClient< ServiceType >::sendRequestSync(), and smacc2::client_core_components::CpServiceClient< ServiceType >::waitForService().
The documentation for this class was generated from the following file:
- smacc2/include/smacc2/client_core_components/cp_service_client.hpp
Generated by