#include <cb_navigate_next_waypoint_until_reached.hpp>

 Public Member Functions inherited from
Public Member Functions inherited from Private Attributes | |
| std::string | goalWaypointName_ |
| std::function< void()> | postEvGoalWaypointReached_ |
Detailed Description
Definition at line 31 of file cb_navigate_next_waypoint_until_reached.hpp.
Constructor & Destructor Documentation
◆ CbNavigateNextWaypointUntilReached()
| cl_nitrosz::CbNavigateNextWaypointUntilReached::CbNavigateNextWaypointUntilReached | ( | std::string | goalWaypointName, |
| std::optional< NavigateNextWaypointOptions > | options = std::nullopt |
||
| ) |
Definition at line 25 of file cb_navigate_next_waypoint_until_reached.cpp.
◆ ~CbNavigateNextWaypointUntilReached()
|
virtual |
Definition at line 31 of file cb_navigate_next_waypoint_until_reached.cpp.
Member Function Documentation
◆ onEntry()
|
overridevirtual |
Reimplemented from cl_nitrosz::CbNavigateNextWaypoint.
Definition at line 33 of file cb_navigate_next_waypoint_until_reached.cpp.
References cl_nitrosz::CbNavigateNextWaypoint::onEntry().
◆ onExit()
|
overridevirtual |
Reimplemented from cl_nitrosz::CbNavigateNextWaypoint.
Definition at line 35 of file cb_navigate_next_waypoint_until_reached.cpp.
References cl_nitrosz::CbNavigateNextWaypoint::onExit().

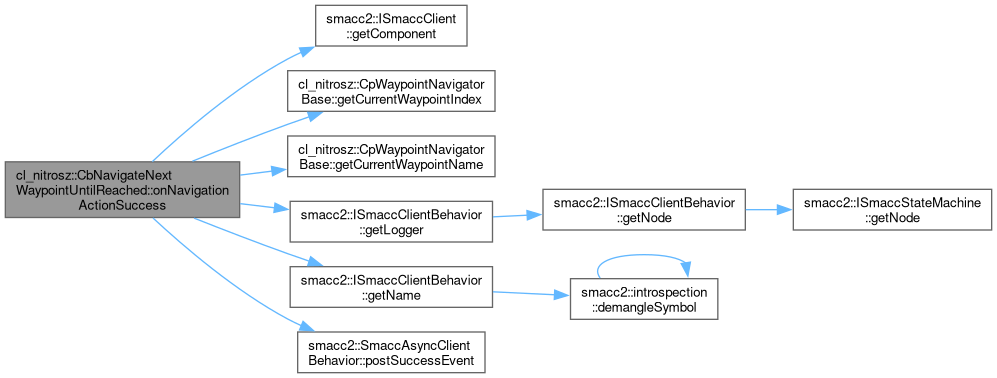
◆ onNavigationActionSuccess()
|
inlineoverridevirtual |
Reimplemented from cl_nitrosz::CbNav2ZClientBehaviorBase.
Definition at line 58 of file cb_navigate_next_waypoint_until_reached.hpp.
References smacc2::ISmaccClient::getComponent(), cl_nitrosz::CpWaypointNavigatorBase::getCurrentWaypointIndex(), cl_nitrosz::CpWaypointNavigatorBase::getCurrentWaypointName(), smacc2::ISmaccClientBehavior::getLogger(), smacc2::ISmaccClientBehavior::getName(), goalWaypointName_, cl_nitrosz::CbNav2ZClientBehaviorBase::navigationResult_, cl_nitrosz::CbNav2ZClientBehaviorBase::nitroszClient_, postEvGoalWaypointReached_, smacc2::SmaccAsyncClientBehavior::postSuccessEvent(), and cl_nitrosz::CbNavigateNextWaypoint::waypointsNavigator_.
◆ onOrthogonalAllocation()
|
inline |
Definition at line 41 of file cb_navigate_next_waypoint_until_reached.hpp.
References cl_nitrosz::CbNav2ZClientBehaviorBase::nitroszClient_, postEvGoalWaypointReached_, and smacc2::ISmaccClientBehavior::requiresClient().

Member Data Documentation
◆ goalWaypointName_
|
private |
Definition at line 99 of file cb_navigate_next_waypoint_until_reached.hpp.
Referenced by onNavigationActionSuccess().
◆ postEvGoalWaypointReached_
|
private |
Definition at line 101 of file cb_navigate_next_waypoint_until_reached.hpp.
Referenced by onNavigationActionSuccess(), and onOrthogonalAllocation().
The documentation for this class was generated from the following files:
- smacc2_client_library/nitrosz_client/nitrosz_client/include/nitrosz_client/client_behaviors/cb_navigate_next_waypoint_until_reached.hpp
- smacc2_client_library/nitrosz_client/nitrosz_client/src/nitrosz_client/client_behaviors/cb_navigate_next_waypoint_until_reached.cpp