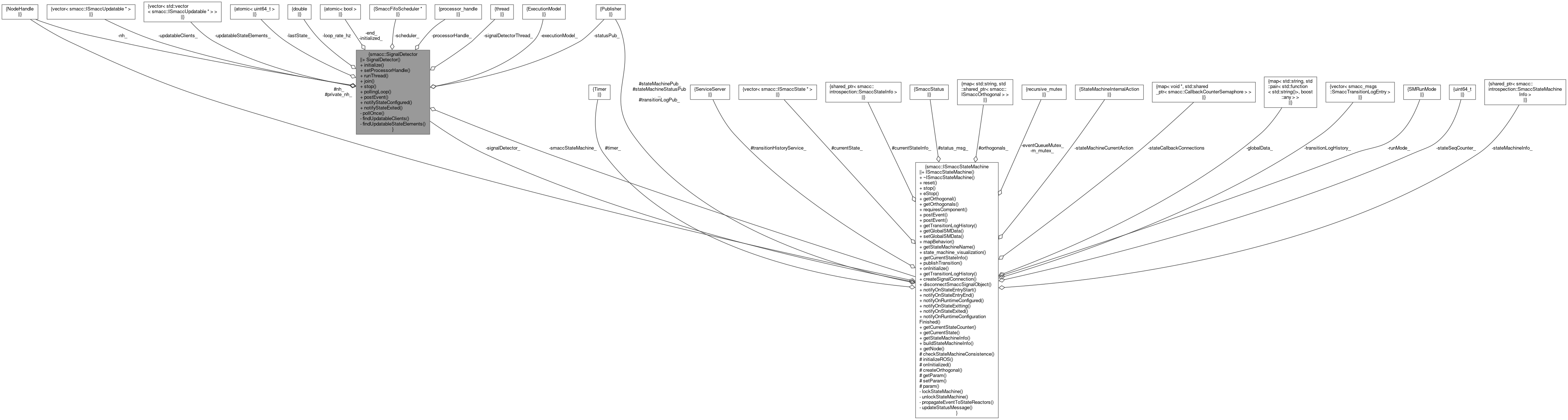
#include <smacc_signal_detector.h>
Public Member Functions | |
| SignalDetector (SmaccFifoScheduler *scheduler, ExecutionModel executionModel=ExecutionModel::SINGLE_THREAD_SPINNER) | |
| void | initialize (ISmaccStateMachine *stateMachine) |
| void | setProcessorHandle (SmaccFifoScheduler::processor_handle processorHandle) |
| void | runThread () |
| void | join () |
| void | stop () |
| void | pollingLoop () |
| template<typename EventType > | |
| void | postEvent (EventType *ev) |
| void | notifyStateConfigured (ISmaccState *currentState) |
| void | notifyStateExited (ISmaccState *currentState) |
Private Member Functions | |
| void | pollOnce () |
| void | findUpdatableClients () |
| void | findUpdatableStateElements (ISmaccState *currentState) |
Private Attributes | |
| ISmaccStateMachine * | smaccStateMachine_ |
| std::vector< ISmaccUpdatable * > | updatableClients_ |
| std::vector< std::vector< ISmaccUpdatable * > > | updatableStateElements_ |
| std::atomic< uint64_t > | lastState_ |
| double | loop_rate_hz |
| std::atomic< bool > | end_ |
| std::atomic< bool > | initialized_ |
| ros::NodeHandle | nh_ |
| ros::Publisher | statusPub_ |
| SmaccFifoScheduler * | scheduler_ |
| SmaccFifoScheduler::processor_handle | processorHandle_ |
| boost::thread | signalDetectorThread_ |
| ExecutionModel | executionModel_ |
Detailed Description
Definition at line 22 of file smacc_signal_detector.h.
Constructor & Destructor Documentation
◆ SignalDetector()
| smacc::SignalDetector::SignalDetector | ( | SmaccFifoScheduler * | scheduler, |
| ExecutionModel | executionModel = ExecutionModel::SINGLE_THREAD_SPINNER |
||
| ) |
SignalDetector()
Definition at line 18 of file signal_detector.cpp.
References loop_rate_hz, and scheduler_.
Member Function Documentation
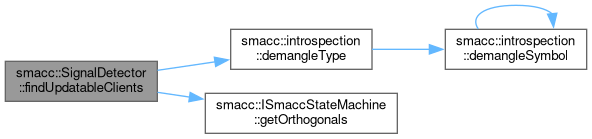
◆ findUpdatableClients()
|
private |
Definition at line 45 of file signal_detector.cpp.
References smacc::introspection::demangleType(), smacc::ISmaccStateMachine::getOrthogonals(), smaccStateMachine_, and updatableClients_.
Referenced by initialize(), and pollOnce().

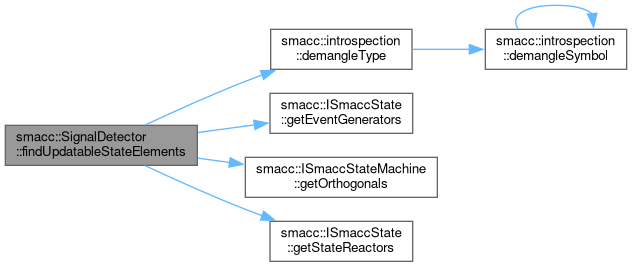
◆ findUpdatableStateElements()
|
private |
findUpdatableClientBehaviors()
Definition at line 85 of file signal_detector.cpp.
References smacc::introspection::demangleType(), smacc::ISmaccState::getEventGenerators(), smacc::ISmaccStateMachine::getOrthogonals(), smacc::ISmaccState::getStateReactors(), smaccStateMachine_, and updatableStateElements_.
Referenced by notifyStateConfigured().

◆ initialize()
| void smacc::SignalDetector::initialize | ( | ISmaccStateMachine * | stateMachine | ) |
Definition at line 32 of file signal_detector.cpp.
References findUpdatableClients(), initialized_, lastState_, and smaccStateMachine_.
Referenced by smacc::ISmaccStateMachine::ISmaccStateMachine().


◆ join()
| void smacc::SignalDetector::join | ( | ) |
Definition at line 162 of file signal_detector.cpp.
References signalDetectorThread_.
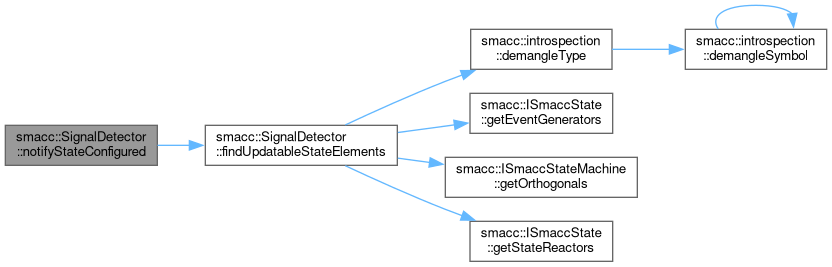
◆ notifyStateConfigured()
| void smacc::SignalDetector::notifyStateConfigured | ( | ISmaccState * | currentState | ) |
Definition at line 177 of file signal_detector.cpp.
References findUpdatableStateElements().
Referenced by smacc::ISmaccStateMachine::notifyOnRuntimeConfigurationFinished().

◆ notifyStateExited()
| void smacc::SignalDetector::notifyStateExited | ( | ISmaccState * | currentState | ) |
Definition at line 182 of file signal_detector.cpp.
References updatableStateElements_.
Referenced by smacc::ISmaccStateMachine::notifyOnStateExited().

◆ pollingLoop()
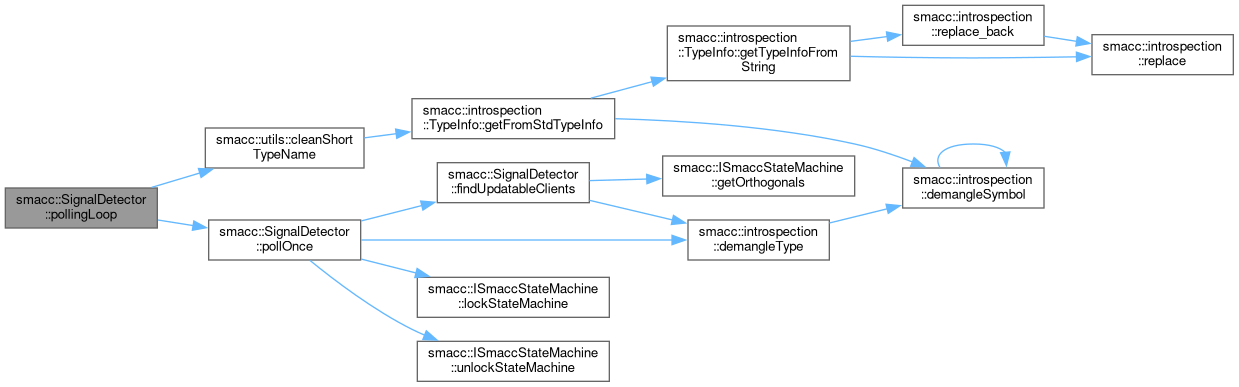
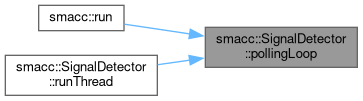
| void smacc::SignalDetector::pollingLoop | ( | ) |
Definition at line 267 of file signal_detector.cpp.
References smacc::utils::cleanShortTypeName(), end_, executionModel_, initialized_, loop_rate_hz, pollOnce(), smacc::SINGLE_THREAD_SPINNER, and smaccStateMachine_.
Referenced by smacc::run(), and runThread().
◆ pollOnce()
|
private |
poll()
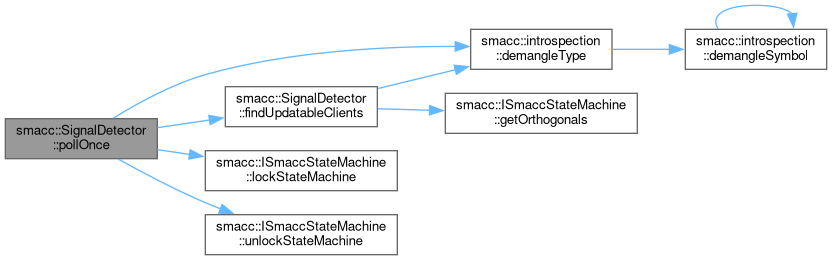
Definition at line 193 of file signal_detector.cpp.
References smacc::introspection::demangleType(), findUpdatableClients(), smacc::ISmaccStateMachine::lockStateMachine(), smaccStateMachine_, smacc::STATE_CONFIGURING, smacc::STATE_ENTERING, smacc::STATE_EXITING, smacc::ISmaccStateMachine::stateMachineCurrentAction, smacc::TRANSITIONING, smacc::ISmaccStateMachine::unlockStateMachine(), updatableClients_, and updatableStateElements_.
Referenced by pollingLoop().

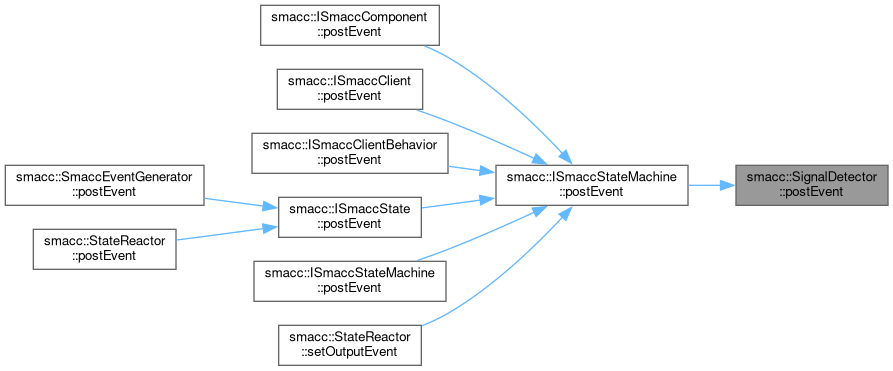
◆ postEvent()
|
inline |
Definition at line 42 of file smacc_signal_detector.h.
References processorHandle_, and scheduler_.
Referenced by smacc::ISmaccStateMachine::postEvent().
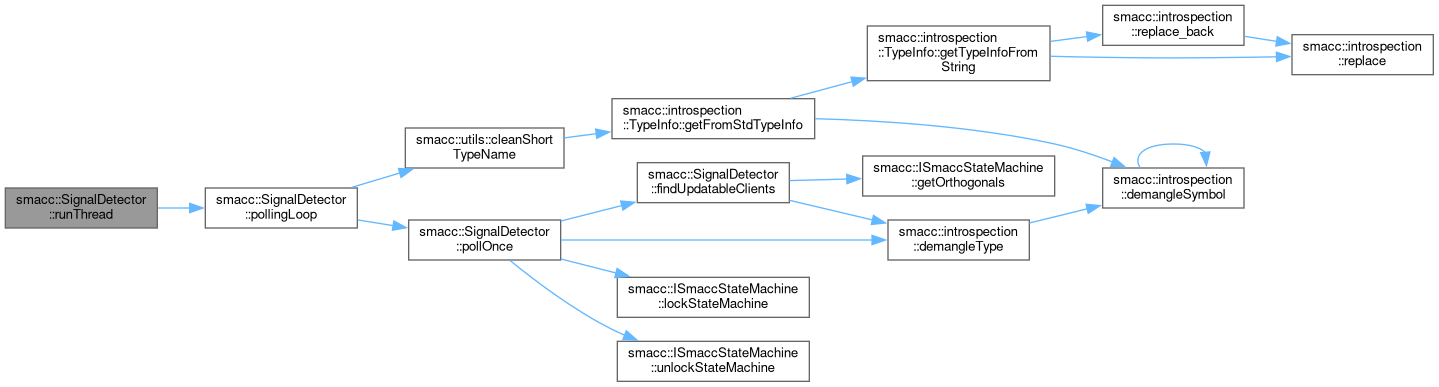
◆ runThread()
| void smacc::SignalDetector::runThread | ( | ) |
Definition at line 152 of file signal_detector.cpp.
References pollingLoop(), and signalDetectorThread_.
◆ setProcessorHandle()
| void smacc::SignalDetector::setProcessorHandle | ( | SmaccFifoScheduler::processor_handle | processorHandle | ) |
Definition at line 142 of file signal_detector.cpp.
References processorHandle_.
Referenced by smacc::run().

◆ stop()
| void smacc::SignalDetector::stop | ( | ) |
Definition at line 172 of file signal_detector.cpp.
References end_.
Member Data Documentation
◆ end_
|
private |
Definition at line 69 of file smacc_signal_detector.h.
Referenced by pollingLoop(), and stop().
◆ executionModel_
|
private |
Definition at line 85 of file smacc_signal_detector.h.
Referenced by pollingLoop().
◆ initialized_
|
private |
Definition at line 71 of file smacc_signal_detector.h.
Referenced by initialize(), and pollingLoop().
◆ lastState_
|
private |
Definition at line 61 of file smacc_signal_detector.h.
Referenced by initialize().
◆ loop_rate_hz
|
private |
Definition at line 67 of file smacc_signal_detector.h.
Referenced by pollingLoop(), and SignalDetector().
◆ nh_
|
private |
Definition at line 73 of file smacc_signal_detector.h.
◆ processorHandle_
|
private |
Definition at line 81 of file smacc_signal_detector.h.
Referenced by postEvent(), and setProcessorHandle().
◆ scheduler_
|
private |
Definition at line 79 of file smacc_signal_detector.h.
Referenced by postEvent(), and SignalDetector().
◆ signalDetectorThread_
|
private |
Definition at line 83 of file smacc_signal_detector.h.
Referenced by join(), and runThread().
◆ smaccStateMachine_
|
private |
Definition at line 55 of file smacc_signal_detector.h.
Referenced by findUpdatableClients(), findUpdatableStateElements(), initialize(), pollingLoop(), and pollOnce().
◆ statusPub_
|
private |
Definition at line 75 of file smacc_signal_detector.h.
◆ updatableClients_
|
private |
Definition at line 57 of file smacc_signal_detector.h.
Referenced by findUpdatableClients(), and pollOnce().
◆ updatableStateElements_
|
private |
Definition at line 59 of file smacc_signal_detector.h.
Referenced by findUpdatableStateElements(), notifyStateExited(), and pollOnce().
The documentation for this class was generated from the following files:
- smacc/include/smacc/smacc_signal_detector.h
- smacc/src/smacc/signal_detector.cpp