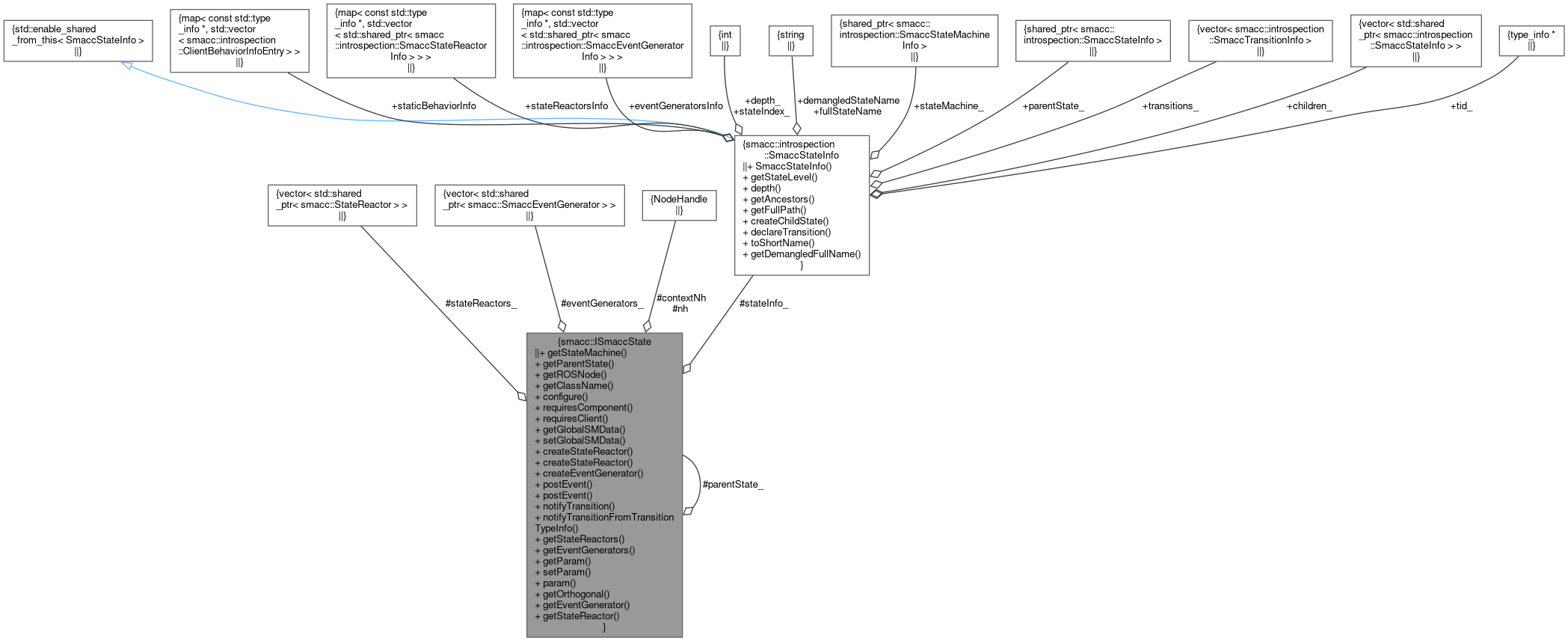
#include <smacc_state.h>

Public Member Functions | |
| virtual ISmaccStateMachine & | getStateMachine ()=0 |
| ISmaccState * | getParentState () |
| ros::NodeHandle & | getROSNode () |
| virtual std::string | getClassName () |
| template<typename TOrthogonal , typename TBehavior , typename... Args> | |
| std::shared_ptr< TBehavior > | configure (Args &&... args) |
| template<typename SmaccComponentType > | |
| void | requiresComponent (SmaccComponentType *&storage) |
| template<typename SmaccClientType > | |
| void | requiresClient (SmaccClientType *&storage) |
| template<typename T > | |
| bool | getGlobalSMData (std::string name, T &ret) |
| template<typename T > | |
| void | setGlobalSMData (std::string name, T value) |
| template<typename TStateReactor , typename TTriggerEvent , typename TEventList , typename... TEvArgs> | |
| std::shared_ptr< TStateReactor > | createStateReactor (TEvArgs... args) |
| template<typename TStateReactor , typename... TEvArgs> | |
| std::shared_ptr< TStateReactor > | createStateReactor (TEvArgs... args) |
| template<typename TEventGenerator , typename... TEvArgs> | |
| std::shared_ptr< TEventGenerator > | createEventGenerator (TEvArgs... args) |
| template<typename EventType > | |
| void | postEvent (const EventType &ev) |
| template<typename EventType > | |
| void | postEvent () |
| template<typename TransitionType > | |
| void | notifyTransition () |
| void | notifyTransitionFromTransitionTypeInfo (std::shared_ptr< smacc::introspection::TypeInfo > &transitionTypeInfo) |
| std::vector< std::shared_ptr< StateReactor > > & | getStateReactors () |
| std::vector< std::shared_ptr< SmaccEventGenerator > > & | getEventGenerators () |
| template<typename T > | |
| bool | getParam (std::string param_name, T ¶m_storage) |
| template<typename T > | |
| void | setParam (std::string param_name, T param_val) |
| template<typename T > | |
| bool | param (std::string param_name, T ¶m_val, const T &default_val) const |
| template<typename TOrthogonal > | |
| TOrthogonal * | getOrthogonal () |
| template<typename TEventGenerator > | |
| TEventGenerator * | getEventGenerator () |
| template<typename TStateReactor > | |
| TStateReactor * | getStateReactor () |
Protected Attributes | |
| std::vector< std::shared_ptr< StateReactor > > | stateReactors_ |
| std::vector< std::shared_ptr< smacc::SmaccEventGenerator > > | eventGenerators_ |
| ros::NodeHandle | nh |
| ros::NodeHandle | contextNh |
| ISmaccState * | parentState_ |
| const smacc::introspection::SmaccStateInfo * | stateInfo_ |
Detailed Description
Definition at line 11 of file smacc_state.h.
Member Function Documentation
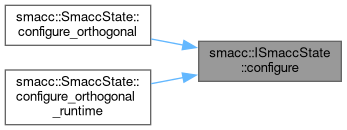
◆ configure()
| std::shared_ptr< TBehavior > smacc::ISmaccState::configure | ( | Args &&... | args | ) |
Definition at line 48 of file smacc_state_impl.h.
References THIS_STATE_NAME.
Referenced by smacc::SmaccState< MostDerived, Context, InnerInitial, historyMode >::configure_orthogonal(), and smacc::SmaccState< MostDerived, Context, InnerInitial, historyMode >::configure_orthogonal_runtime().
◆ createEventGenerator()
| std::shared_ptr< TEventGenerator > smacc::ISmaccState::createEventGenerator | ( | TEvArgs... | args | ) |
Definition at line 120 of file smacc_state_impl.h.
References eventGenerators_.
◆ createStateReactor() [1/2]
| std::shared_ptr< TStateReactor > smacc::ISmaccState::createStateReactor | ( | TEvArgs... | args | ) |
Definition at line 143 of file smacc_state_impl.h.
References stateReactors_.
◆ createStateReactor() [2/2]
| std::shared_ptr< TStateReactor > smacc::ISmaccState::createStateReactor | ( | TEvArgs... | args | ) |
Definition at line 110 of file smacc_state_impl.h.
References stateReactors_.
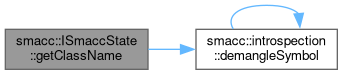
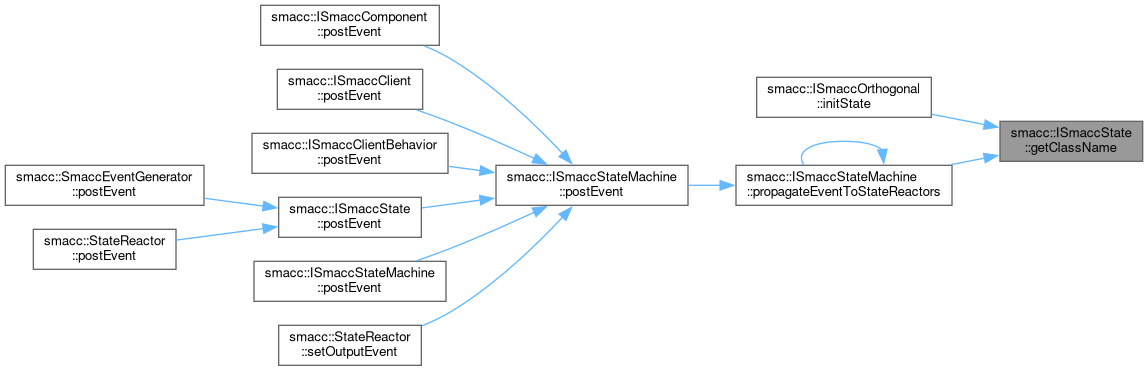
◆ getClassName()
|
virtual |
Definition at line 6 of file smacc_state.cpp.
References smacc::introspection::demangleSymbol().
Referenced by smacc::ISmaccOrthogonal::initState(), and smacc::ISmaccStateMachine::propagateEventToStateReactors().
◆ getEventGenerator()
| TEventGenerator * smacc::ISmaccState::getEventGenerator |
Definition at line 168 of file smacc_state_impl.h.
References eventGenerators_.
◆ getEventGenerators()
|
inline |
Definition at line 62 of file smacc_state.h.
References eventGenerators_.
Referenced by smacc::SignalDetector::findUpdatableStateElements().

◆ getGlobalSMData()
| bool smacc::ISmaccState::getGlobalSMData | ( | std::string | name, |
| T & | ret | ||
| ) |
Definition at line 95 of file smacc_state_impl.h.
References smacc::ISmaccStateMachine::getGlobalSMData(), and getStateMachine().
◆ getOrthogonal()
| TOrthogonal * smacc::ISmaccState::getOrthogonal |
Definition at line 161 of file smacc_state_impl.h.
References smacc::ISmaccStateMachine::getOrthogonal(), and getStateMachine().
◆ getParam()
| bool smacc::ISmaccState::getParam | ( | std::string | param_name, |
| T & | param_storage | ||
| ) |
Definition at line 24 of file smacc_state_impl.h.
References nh.
Referenced by cl_move_base_z::CbNavigateGlobalPosition::readStartPoseFromParameterServer().

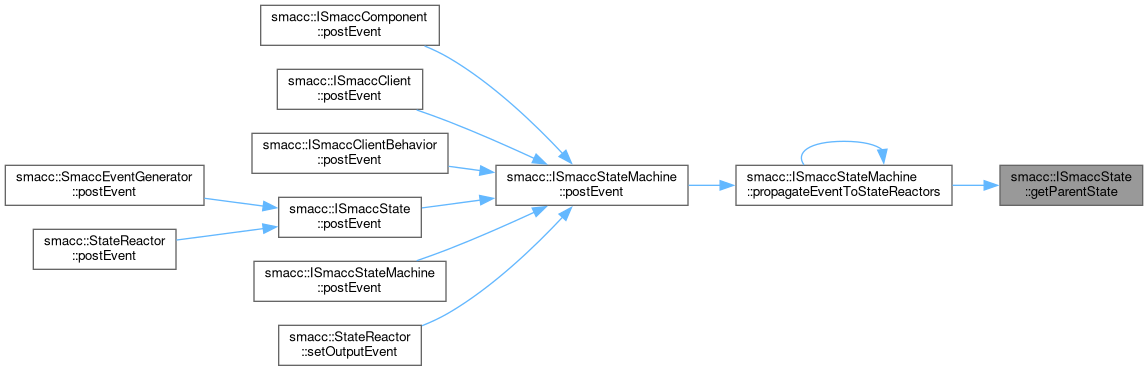
◆ getParentState()
|
inline |
Definition at line 16 of file smacc_state.h.
References parentState_.
Referenced by smacc::ISmaccStateMachine::propagateEventToStateReactors().
◆ getROSNode()
|
inline |
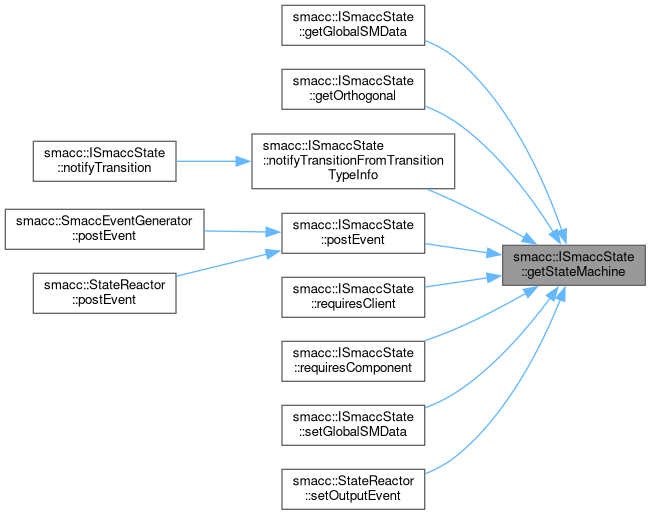
◆ getStateMachine()
|
pure virtual |
Implemented in smacc::SmaccState< MostDerived, Context, InnerInitial, historyMode >.
Referenced by getGlobalSMData(), getOrthogonal(), notifyTransitionFromTransitionTypeInfo(), postEvent(), requiresClient(), requiresComponent(), setGlobalSMData(), and smacc::StateReactor::setOutputEvent().
◆ getStateReactor()
| TStateReactor * smacc::ISmaccState::getStateReactor |
Definition at line 181 of file smacc_state_impl.h.
References stateReactors_.
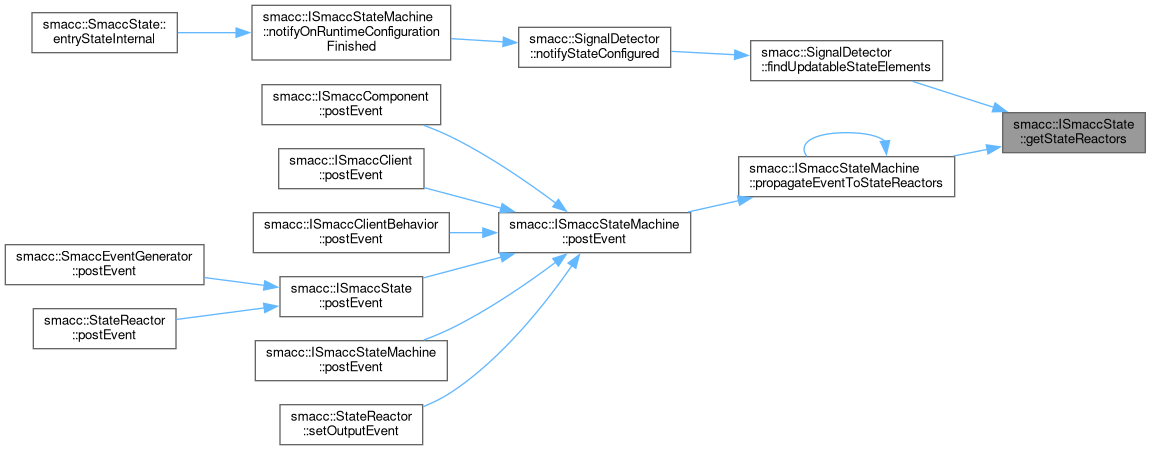
◆ getStateReactors()
|
inline |
Definition at line 60 of file smacc_state.h.
References stateReactors_.
Referenced by smacc::SignalDetector::findUpdatableStateElements(), and smacc::ISmaccStateMachine::propagateEventToStateReactors().
◆ notifyTransition()
| void smacc::ISmaccState::notifyTransition |
Definition at line 219 of file smacc_state_impl.h.
References notifyTransitionFromTransitionTypeInfo().

◆ notifyTransitionFromTransitionTypeInfo()
| void smacc::ISmaccState::notifyTransitionFromTransitionTypeInfo | ( | std::shared_ptr< smacc::introspection::TypeInfo > & | transitionTypeInfo | ) |
Definition at line 11 of file smacc_state.cpp.
References getStateMachine(), smacc::ISmaccStateMachine::publishTransition(), and stateInfo_.
Referenced by notifyTransition().


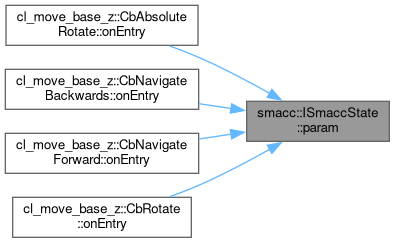
◆ param()
| bool smacc::ISmaccState::param | ( | std::string | param_name, |
| T & | param_val, | ||
| const T & | default_val | ||
| ) | const |
Definition at line 40 of file smacc_state_impl.h.
References nh.
Referenced by cl_move_base_z::CbAbsoluteRotate::onEntry(), cl_move_base_z::CbNavigateBackwards::onEntry(), cl_move_base_z::CbNavigateForward::onEntry(), and cl_move_base_z::CbRotate::onEntry().
◆ postEvent() [1/2]
| void smacc::ISmaccState::postEvent |
Definition at line 212 of file smacc_state_impl.h.
References getStateMachine(), and smacc::ISmaccStateMachine::postEvent().
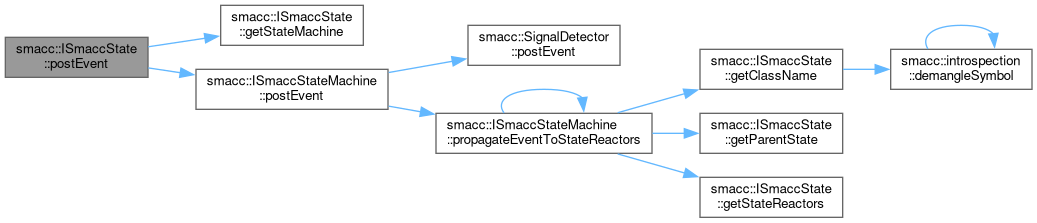
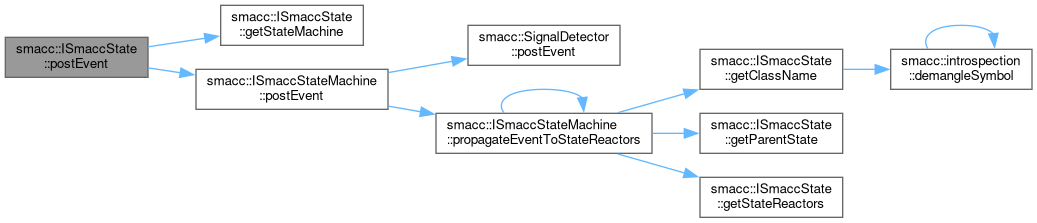
◆ postEvent() [2/2]
| void smacc::ISmaccState::postEvent | ( | const EventType & | ev | ) |
Definition at line 206 of file smacc_state_impl.h.
References getStateMachine(), and smacc::ISmaccStateMachine::postEvent().
Referenced by smacc::SmaccEventGenerator::postEvent(), and smacc::StateReactor::postEvent().
◆ requiresClient()
| void smacc::ISmaccState::requiresClient | ( | SmaccClientType *& | storage | ) |
Definition at line 78 of file smacc_state_impl.h.
References smacc::introspection::demangleSymbol(), smacc::ISmaccStateMachine::getOrthogonals(), and getStateMachine().
◆ requiresComponent()
| void smacc::ISmaccState::requiresComponent | ( | SmaccComponentType *& | storage | ) |
Definition at line 71 of file smacc_state_impl.h.
References getStateMachine(), and smacc::ISmaccStateMachine::requiresComponent().

◆ setGlobalSMData()
| void smacc::ISmaccState::setGlobalSMData | ( | std::string | name, |
| T | value | ||
| ) |
Definition at line 103 of file smacc_state_impl.h.
References getStateMachine(), and smacc::ISmaccStateMachine::setGlobalSMData().

◆ setParam()
| void smacc::ISmaccState::setParam | ( | std::string | param_name, |
| T | param_val | ||
| ) |
Definition at line 32 of file smacc_state_impl.h.
References nh.
Referenced by smacc::SmaccState< MostDerived, Context, InnerInitial, historyMode >::entryStateInternal().

Member Data Documentation
◆ contextNh
|
protected |
Definition at line 91 of file smacc_state.h.
Referenced by smacc::SmaccState< MostDerived, Context, InnerInitial, historyMode >::entryStateInternal(), and smacc::SmaccState< MostDerived, Context, InnerInitial, historyMode >::SmaccState().
◆ eventGenerators_
|
protected |
Definition at line 87 of file smacc_state.h.
Referenced by createEventGenerator(), getEventGenerator(), and getEventGenerators().
◆ nh
|
protected |
Definition at line 89 of file smacc_state.h.
Referenced by smacc::SmaccState< MostDerived, Context, InnerInitial, historyMode >::entryStateInternal(), getParam(), getROSNode(), param(), and setParam().
◆ parentState_
|
protected |
Definition at line 93 of file smacc_state.h.
Referenced by getParentState(), smacc::SmaccState< MostDerived, Context, InnerInitial, historyMode >::getParentState(), and smacc::SmaccState< MostDerived, Context, InnerInitial, historyMode >::SmaccState().
◆ stateInfo_
|
protected |
Definition at line 95 of file smacc_state.h.
Referenced by notifyTransitionFromTransitionTypeInfo(), and smacc::SmaccState< MostDerived, Context, InnerInitial, historyMode >::SmaccState().
◆ stateReactors_
|
protected |
Definition at line 86 of file smacc_state.h.
Referenced by createStateReactor(), getStateReactor(), and getStateReactors().
The documentation for this class was generated from the following files:
- smacc/include/smacc/smacc_state.h
- smacc/include/smacc/impl/smacc_state_impl.h
- smacc/src/smacc/smacc_state.cpp