#include <cb_move_known_state.h>
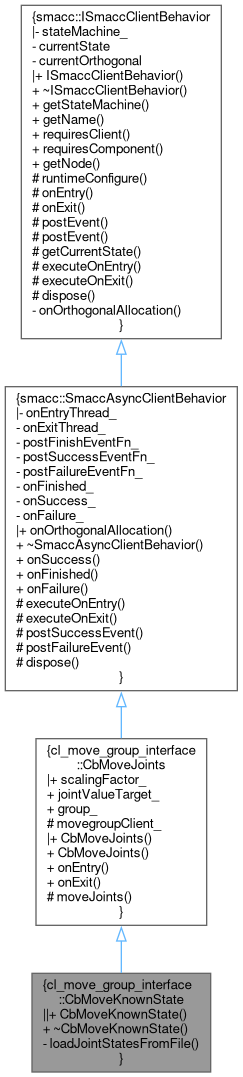
Inheritance diagram for cl_move_group_interface::CbMoveKnownState:
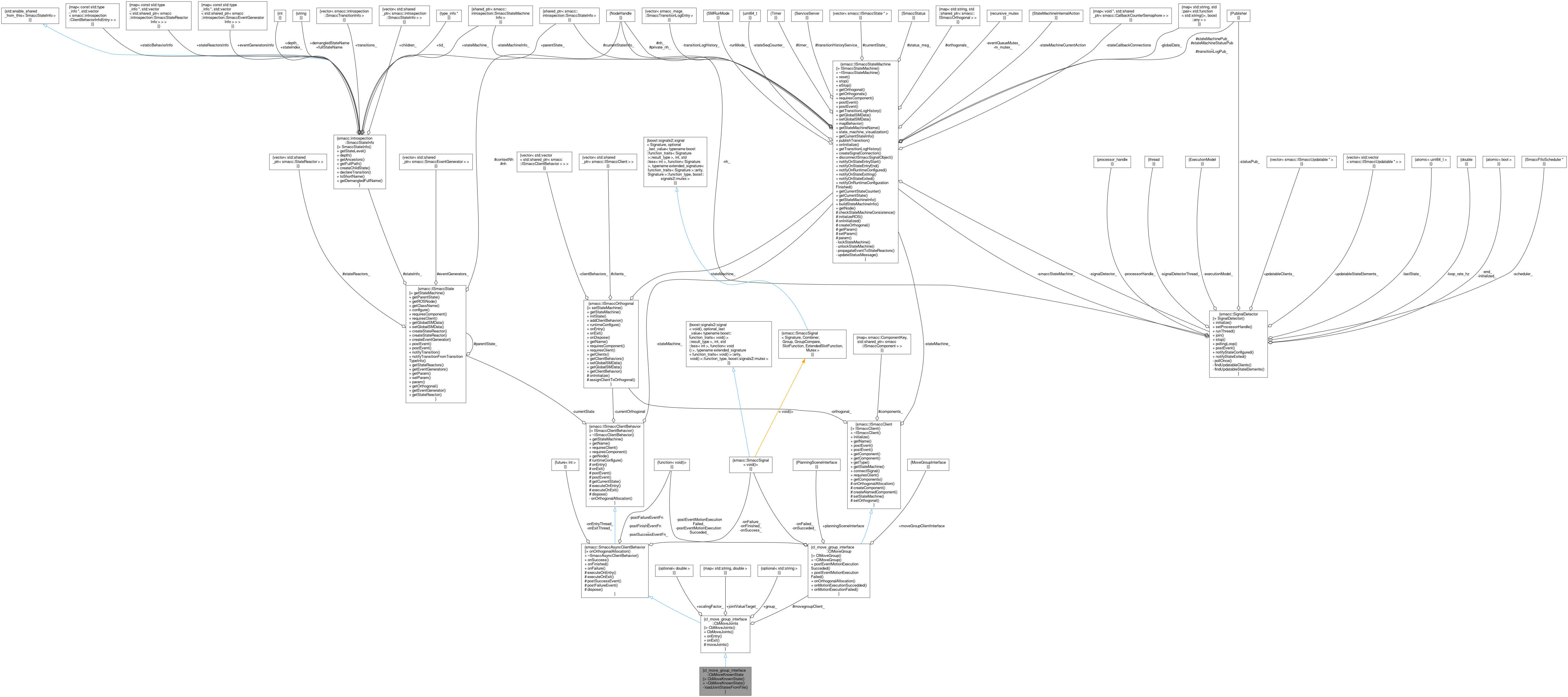
Collaboration diagram for cl_move_group_interface::CbMoveKnownState:
Public Member Functions | |
| CbMoveKnownState (std::string pkg, std::string config_path) | |
| virtual | ~CbMoveKnownState () |
 Public Member Functions inherited from cl_move_group_interface::CbMoveJoints Public Member Functions inherited from cl_move_group_interface::CbMoveJoints | |
| CbMoveJoints () | |
| CbMoveJoints (const std::map< std::string, double > &jointValueTarget) | |
| virtual void | onEntry () override |
| virtual void | onExit () override |
| Public Member Functions inherited from smacc::SmaccAsyncClientBehavior | |
| template<typename TOrthogonal , typename TSourceObject > | |
| void | onOrthogonalAllocation () |
| virtual | ~SmaccAsyncClientBehavior () |
| template<typename TCallback , typename T > | |
| boost::signals2::connection | onSuccess (TCallback callback, T *object) |
| template<typename TCallback , typename T > | |
| boost::signals2::connection | onFinished (TCallback callback, T *object) |
| template<typename TCallback , typename T > | |
| boost::signals2::connection | onFailure (TCallback callback, T *object) |
| Public Member Functions inherited from smacc::ISmaccClientBehavior | |
| ISmaccClientBehavior () | |
| virtual | ~ISmaccClientBehavior () |
| ISmaccStateMachine * | getStateMachine () |
| std::string | getName () const |
| template<typename SmaccClientType > | |
| void | requiresClient (SmaccClientType *&storage) |
| template<typename SmaccComponentType > | |
| void | requiresComponent (SmaccComponentType *&storage) |
| ros::NodeHandle | getNode () |
Static Private Member Functions | |
| static std::map< std::string, double > | loadJointStatesFromFile (std::string pkg, std::string filepath) |
Additional Inherited Members | |
| Public Attributes inherited from cl_move_group_interface::CbMoveJoints | |
| boost::optional< double > | scalingFactor_ |
| std::map< std::string, double > | jointValueTarget_ |
| boost::optional< std::string > | group_ |
| Protected Member Functions inherited from cl_move_group_interface::CbMoveJoints | |
| void | moveJoints (moveit::planning_interface::MoveGroupInterface &moveGroupInterface) |
| Protected Member Functions inherited from smacc::SmaccAsyncClientBehavior | |
| virtual void | executeOnEntry () override |
| virtual void | executeOnExit () override |
| void | postSuccessEvent () |
| void | postFailureEvent () |
| virtual void | dispose () override |
| Protected Member Functions inherited from smacc::ISmaccClientBehavior | |
| virtual void | runtimeConfigure () |
| virtual void | onEntry () |
| virtual void | onExit () |
| template<typename EventType > | |
| void | postEvent (const EventType &ev) |
| template<typename EventType > | |
| void | postEvent () |
| ISmaccState * | getCurrentState () |
| virtual void | executeOnEntry () |
| virtual void | executeOnExit () |
| virtual void | dispose () |
| Protected Attributes inherited from cl_move_group_interface::CbMoveJoints | |
| ClMoveGroup * | movegroupClient_ |
Detailed Description
Definition at line 15 of file cb_move_known_state.h.
Constructor & Destructor Documentation
◆ CbMoveKnownState()
| cl_move_group_interface::CbMoveKnownState::CbMoveKnownState | ( | std::string | pkg, |
| std::string | config_path | ||
| ) |
Definition at line 15 of file cb_move_known_state.cpp.
17{
18}
static std::map< std::string, double > loadJointStatesFromFile(std::string pkg, std::string filepath)
Definition: cb_move_known_state.cpp:27
◆ ~CbMoveKnownState()
|
virtual |
Definition at line 20 of file cb_move_known_state.cpp.
21{
22
23}
Member Function Documentation
◆ loadJointStatesFromFile()
|
staticprivate |
Definition at line 27 of file cb_move_known_state.cpp.
28{
29 auto pkgpath = ros::package::getPath(pkg);
30 std::map<std::string, double> jointStates;
31
32 if(pkgpath == "")
33 {
34 ROS_ERROR_STREAM("[CbMoveKnownState] package not found for the known poses file: " << pkg << std::endl << " [IGNORING BEHAVIOR]");
35 return jointStates;
36 }
37
38 filepath = pkgpath +"/" + filepath;
39
40
41 ROS_INFO("[CbMoveKnownState] Opening file with joint known state: %s", filepath.c_str());
42
43
44 if(std::experimental::filesystem::exists(filepath))
45 {
46 ROS_INFO_STREAM("[CbMoveKnownState] known state file exists: " << filepath);
47 }
48 else
49 {
50 ROS_ERROR_STREAM("[CbMoveKnownState] known state file does not exists: " << filepath);
51 }
52
53 std::ifstream ifs(filepath.c_str(), std::ifstream::in);
54 if (ifs.good() == false)
55 {
56 ROS_ERROR("[CbMoveKnownState] Error opening file with joint known states: %s", filepath.c_str());
57 throw std::string("joint state files not found");
58 }
59
60 try
61 {
62#ifdef HAVE_NEW_YAMLCPP
63 YAML::Node node = YAML::Load(ifs);
64#else
65 YAML::Parser parser(ifs);
66 parser.GetNextDocument(node);
67#endif
68
69#ifdef HAVE_NEW_YAMLCPP
70 const YAML::Node &wp_node_tmp = node["joint_states"];
71 const YAML::Node *wp_node = wp_node_tmp ? &wp_node_tmp : NULL;
72#else
73 const YAML::Node *wp_node = node.FindValue("waypoints");
74#endif
75
76 if (wp_node != NULL)
77 {
78 try
79 {
80 for(YAML::const_iterator it=wp_node->begin();it != wp_node->end();++it)
81 {
82 std::string key = it->first.as<std::string>();
83 double value = it->second.as<double>();
84 ROS_DEBUG_STREAM(" joint - " << key << ": " << value);
85 jointStates[key] = value;
86 }
87
88 return jointStates;
89 }
90 catch(std::exception& ex)
91 {
92 ROS_ERROR("trying to convert to map, failed, errormsg: %s", ex.what());
93 }
94
95 ROS_INFO_STREAM("Parsed " << jointStates.size() << " joint entries.");
96 }
97 else
98 {
99 ROS_WARN_STREAM("Couldn't find any jointStates in the provided yaml file.");
100 }
101 }
102 catch (const YAML::ParserException &ex)
103 {
104 ROS_ERROR_STREAM("Error loading the Waypoints YAML file. Incorrect syntax: " << ex.what());
105 }
106 return jointStates;
107}
The documentation for this class was generated from the following files:
- smacc_client_library/move_group_interface_client/include/move_group_interface_client/client_behaviors/cb_move_known_state.h
- smacc_client_library/move_group_interface_client/src/move_group_interface_client/client_behaviors/cb_move_known_state.cpp