#include <ros/ros.h>#include <rosgraph_msgs/Log.h>#include <smacc_msgs/SmaccTransitionLogEntry.h>#include <boost/signals2.hpp>#include <memory>#include <vector>
Include dependency graph for smacc_runtime_test_node.cpp:

Go to the source code of this file.
Classes | |
| class | TestPolicy |
| class | SmaccTestRuntimeNode |
| class | TimeoutFailureTestPolicy |
| class | ReachedStateSuccessTestPolicy |
Functions | |
| int | main (int argc, char **argv) |
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 185 of file smacc_runtime_test_node.cpp.
186{
187 ros::init(argc, argv, "smacc_runtime_test_node");
188
189 SmaccTestRuntimeNode testNode;
190 testNode.init();
191
192 ros::Rate r(20);
193
194 while (ros::ok())
195 {
196 testNode.update();
197 ros::spinOnce();
198 r.sleep();
199 }
200 // ros::Subscriber sub = nh.subscribe();
201}
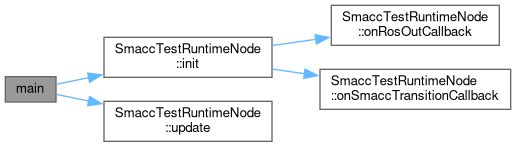
References SmaccTestRuntimeNode::init(), and SmaccTestRuntimeNode::update().
Here is the call graph for this function: