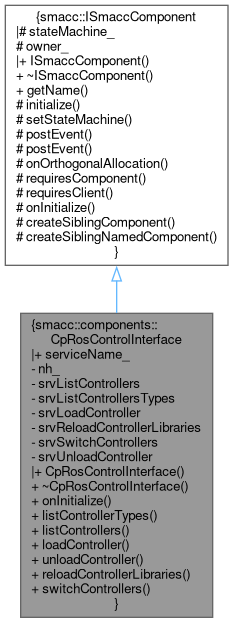
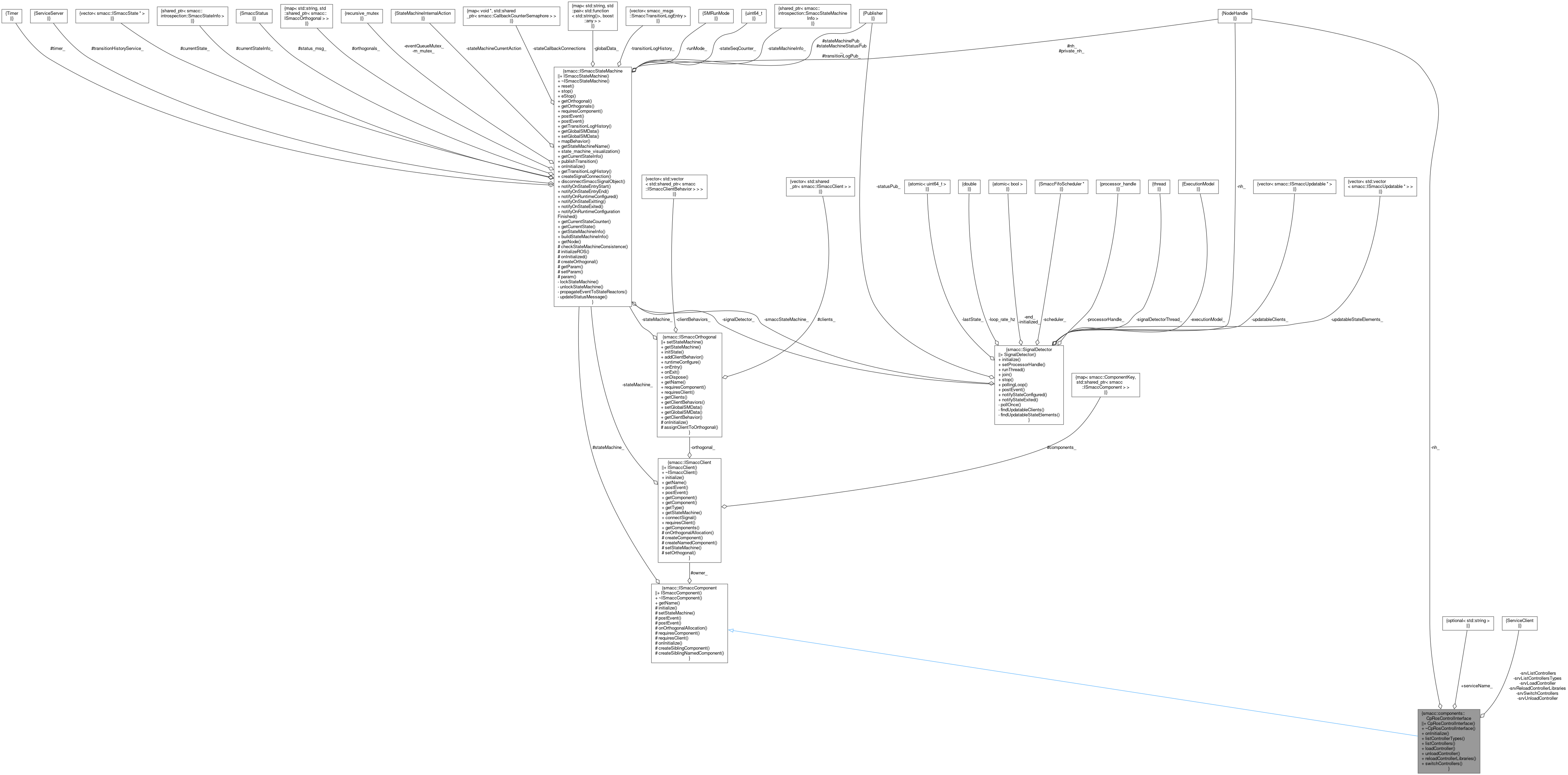
#include <cp_ros_control_interface.h>
Public Member Functions | |
| CpRosControlInterface () | |
| virtual | ~CpRosControlInterface () |
| virtual void | onInitialize () override |
| std::vector< ControllerTypeInfo > | listControllerTypes () |
| std::vector< controller_manager_msgs::ControllerState > | listControllers () |
| bool | loadController (std::string name) |
| bool | unloadController (std::string name) |
| bool | reloadControllerLibraries (bool forceKill) |
| bool | switchControllers (std::vector< std::string > start_controllers, std::vector< std::string > stop_controllers, Strictness strictness) |
 Public Member Functions inherited from smacc::ISmaccComponent Public Member Functions inherited from smacc::ISmaccComponent | |
| ISmaccComponent () | |
| virtual | ~ISmaccComponent () |
| virtual std::string | getName () const |
Public Attributes | |
| boost::optional< std::string > | serviceName_ |
Private Attributes | |
| ros::NodeHandle | nh_ |
| ros::ServiceClient | srvListControllers |
| ros::ServiceClient | srvListControllersTypes |
| ros::ServiceClient | srvLoadController |
| ros::ServiceClient | srvReloadControllerLibraries |
| ros::ServiceClient | srvSwitchControllers |
| ros::ServiceClient | srvUnloadController |
Additional Inherited Members | |
| Protected Member Functions inherited from smacc::ISmaccComponent | |
| virtual void | initialize (ISmaccClient *owner) |
| void | setStateMachine (ISmaccStateMachine *stateMachine) |
| template<typename EventType > | |
| void | postEvent (const EventType &ev) |
| template<typename EventType > | |
| void | postEvent () |
| template<typename TOrthogonal , typename TSourceObject > | |
| void | onOrthogonalAllocation () |
| template<typename TComponent > | |
| void | requiresComponent (TComponent *&requiredComponentStorage) |
| template<typename TClient > | |
| void | requiresClient (TClient *&requiredClientStorage) |
| virtual void | onInitialize () |
| template<typename SmaccComponentType , typename TOrthogonal , typename TClient , typename... TArgs> | |
| SmaccComponentType * | createSiblingComponent (TArgs... targs) |
| template<typename SmaccComponentType , typename TOrthogonal , typename TClient , typename... TArgs> | |
| SmaccComponentType * | createSiblingNamedComponent (std::string name, TArgs... targs) |
| Protected Attributes inherited from smacc::ISmaccComponent | |
| ISmaccStateMachine * | stateMachine_ |
| ISmaccClient * | owner_ |
Detailed Description
Definition at line 21 of file cp_ros_control_interface.h.
Constructor & Destructor Documentation
◆ CpRosControlInterface()
| smacc::components::CpRosControlInterface::CpRosControlInterface | ( | ) |
Definition at line 16 of file cp_ros_control_interface.cpp.
◆ ~CpRosControlInterface()
|
virtual |
Definition at line 20 of file cp_ros_control_interface.cpp.
Member Function Documentation
◆ listControllers()
| std::vector< controller_manager_msgs::ControllerState > smacc::components::CpRosControlInterface::listControllers | ( | ) |
Definition at line 35 of file cp_ros_control_interface.cpp.
References srvListControllers.
◆ listControllerTypes()
| std::vector< ControllerTypeInfo > smacc::components::CpRosControlInterface::listControllerTypes | ( | ) |
Definition at line 44 of file cp_ros_control_interface.cpp.
References smacc::components::ControllerTypeInfo::baseClass, srvListControllersTypes, and smacc::components::ControllerTypeInfo::type.
◆ loadController()
| bool smacc::components::CpRosControlInterface::loadController | ( | std::string | name | ) |
Definition at line 63 of file cp_ros_control_interface.cpp.
References srvLoadController.
◆ onInitialize()
|
overridevirtual |
Reimplemented from smacc::ISmaccComponent.
Definition at line 24 of file cp_ros_control_interface.cpp.
References nh_, srvListControllers, srvListControllersTypes, srvLoadController, srvReloadControllerLibraries, srvSwitchControllers, and srvUnloadController.
◆ reloadControllerLibraries()
Definition at line 83 of file cp_ros_control_interface.cpp.
References srvReloadControllerLibraries.
◆ switchControllers()
| bool smacc::components::CpRosControlInterface::switchControllers | ( | std::vector< std::string > | start_controllers, |
| std::vector< std::string > | stop_controllers, | ||
| Strictness | strictness | ||
| ) |
Definition at line 95 of file cp_ros_control_interface.cpp.
References srvSwitchControllers.
◆ unloadController()
| bool smacc::components::CpRosControlInterface::unloadController | ( | std::string | name | ) |
Definition at line 73 of file cp_ros_control_interface.cpp.
References srvUnloadController.
Member Data Documentation
◆ nh_
|
private |
Definition at line 50 of file cp_ros_control_interface.h.
Referenced by onInitialize().
◆ serviceName_
| boost::optional<std::string> smacc::components::CpRosControlInterface::serviceName_ |
Definition at line 47 of file cp_ros_control_interface.h.
◆ srvListControllers
|
private |
Definition at line 52 of file cp_ros_control_interface.h.
Referenced by listControllers(), and onInitialize().
◆ srvListControllersTypes
|
private |
Definition at line 53 of file cp_ros_control_interface.h.
Referenced by listControllerTypes(), and onInitialize().
◆ srvLoadController
|
private |
Definition at line 54 of file cp_ros_control_interface.h.
Referenced by loadController(), and onInitialize().
◆ srvReloadControllerLibraries
|
private |
Definition at line 55 of file cp_ros_control_interface.h.
Referenced by onInitialize(), and reloadControllerLibraries().
◆ srvSwitchControllers
|
private |
Definition at line 56 of file cp_ros_control_interface.h.
Referenced by onInitialize(), and switchControllers().
◆ srvUnloadController
|
private |
Definition at line 57 of file cp_ros_control_interface.h.
Referenced by onInitialize(), and unloadController().
The documentation for this class was generated from the following files:
- smacc/include/smacc/client_base_components/cp_ros_control_interface.h
- smacc/src/smacc/components/cp_ros_control_interface.cpp