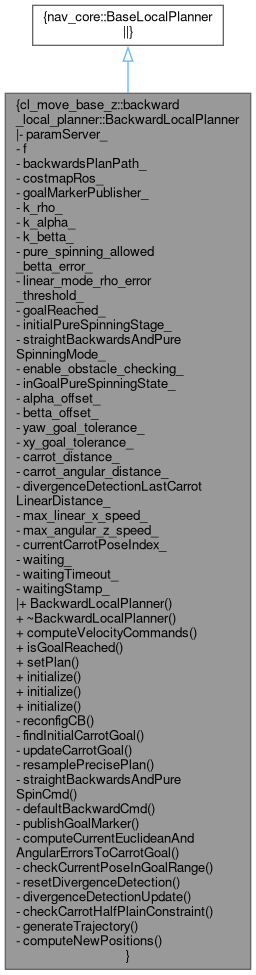
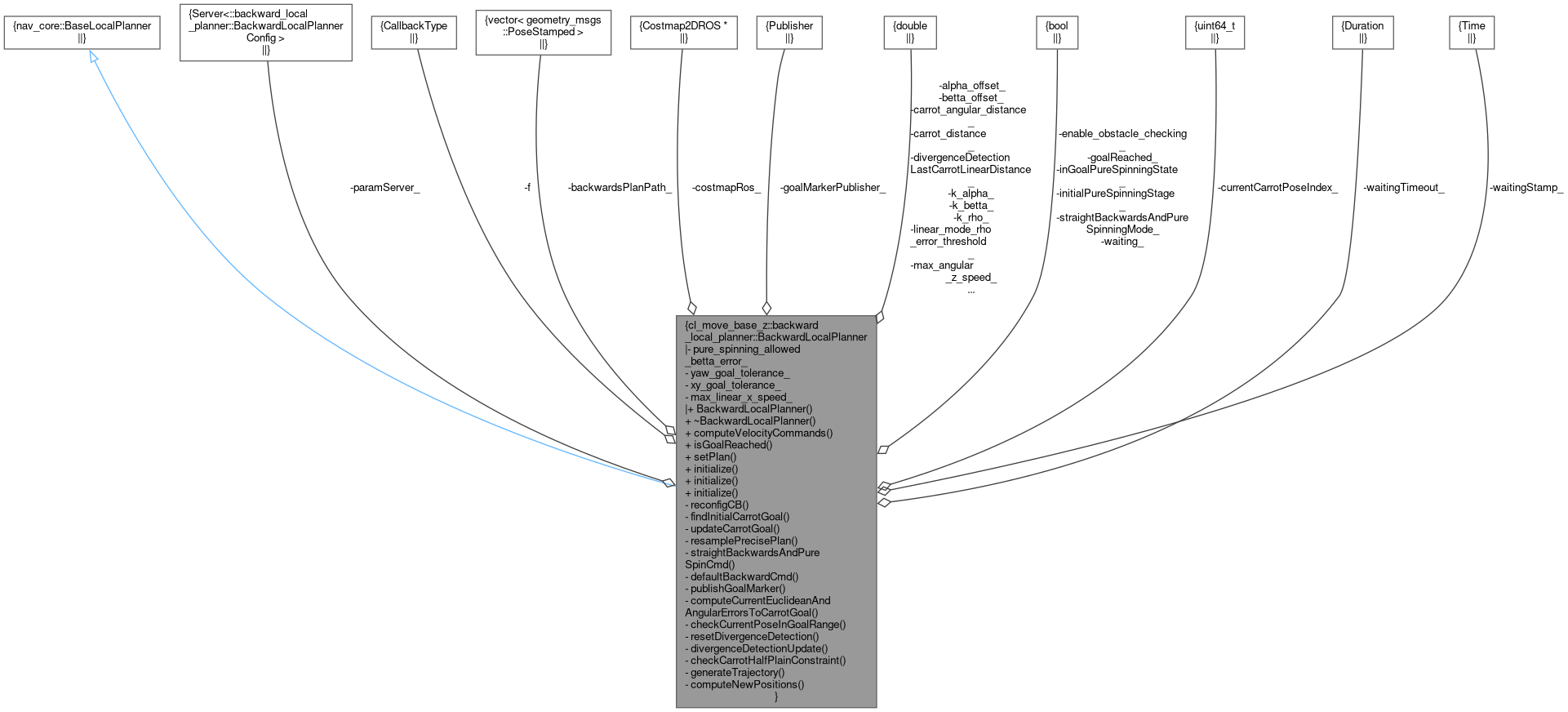
#include <backward_local_planner.h>
Public Member Functions | |
| BackwardLocalPlanner () | |
| virtual | ~BackwardLocalPlanner () |
| virtual bool | computeVelocityCommands (geometry_msgs::Twist &cmd_vel) override |
| Given the current position, orientation, and velocity of the robot: compute velocity commands to send to the robot mobile base. More... | |
| virtual bool | isGoalReached () override |
| Check if the goal pose has been achieved by the local planner. More... | |
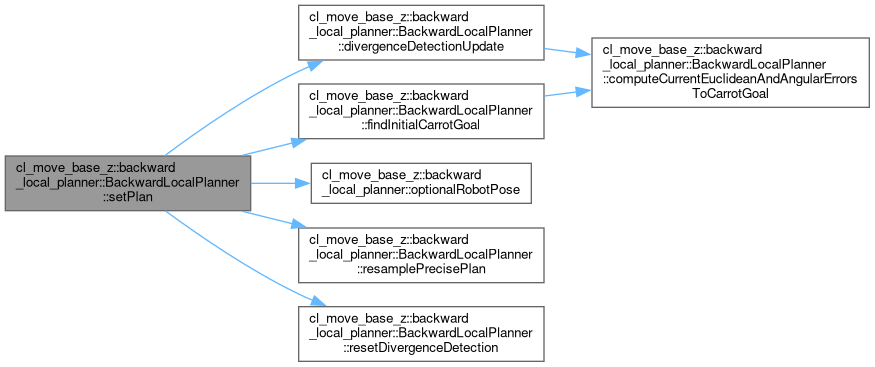
| virtual bool | setPlan (const std::vector< geometry_msgs::PoseStamped > &plan) override |
| Set the plan that the local planner is following. More... | |
| void | initialize (std::string name, tf::TransformListener *tf, costmap_2d::Costmap2DROS *costmapRos_) |
| Constructs the local planner. More... | |
| void | initialize (std::string name, tf2_ros::Buffer *tf, costmap_2d::Costmap2DROS *costmapRos_) |
| void | initialize () |
Private Member Functions | |
| void | reconfigCB (::backward_local_planner::BackwardLocalPlannerConfig &config, uint32_t level) |
| bool | findInitialCarrotGoal (tf::Stamped< tf::Pose > &pose) |
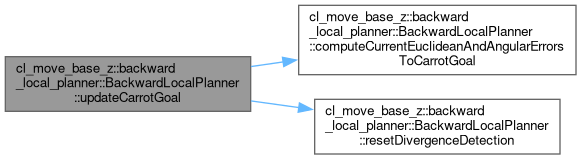
| bool | updateCarrotGoal (const tf::Stamped< tf::Pose > &tfpose) |
| bool | resamplePrecisePlan () |
| void | straightBackwardsAndPureSpinCmd (const tf::Stamped< tf::Pose > &tfpose, double vetta, double gamma, double alpha_error, double betta_error, double rho_error, geometry_msgs::Twist &cmd_vel) |
| void | defaultBackwardCmd (const tf::Stamped< tf::Pose > &tfpose, double vetta, double gamma, double alpha_error, double betta_error, geometry_msgs::Twist &cmd_vel) |
| void | publishGoalMarker (double x, double y, double phi) |
| void | computeCurrentEuclideanAndAngularErrorsToCarrotGoal (const tf::Stamped< tf::Pose > &tfpose, double &dist, double &angular_error) |
| bool | checkCurrentPoseInGoalRange (const tf::Stamped< tf::Pose > &tfpose, double angle_error, bool &inLinearGoal) |
| bool | resetDivergenceDetection () |
| bool | divergenceDetectionUpdate (const tf::Stamped< tf::Pose > &tfpose) |
| bool | checkCarrotHalfPlainConstraint (const tf::Stamped< tf::Pose > &tfpose) |
| void | generateTrajectory (const Eigen::Vector3f &pos, const Eigen::Vector3f &vel, float maxdist, float maxangle, float maxtime, float dt, std::vector< Eigen::Vector3f > &outtraj) |
| Eigen::Vector3f | computeNewPositions (const Eigen::Vector3f &pos, const Eigen::Vector3f &vel, double dt) |
Detailed Description
Definition at line 23 of file backward_local_planner.h.
Constructor & Destructor Documentation
◆ BackwardLocalPlanner()
| cl_move_base_z::backward_local_planner::BackwardLocalPlanner::BackwardLocalPlanner | ( | ) |
Definition at line 20 of file backward_local_planner.cpp.
◆ ~BackwardLocalPlanner()
|
virtual |
Member Function Documentation
◆ checkCarrotHalfPlainConstraint()
|
private |
Definition at line 212 of file backward_local_planner.cpp.
References backwardsPlanPath_, and currentCarrotPoseIndex_.
Referenced by computeVelocityCommands().

◆ checkCurrentPoseInGoalRange()
|
private |
Definition at line 240 of file backward_local_planner.cpp.
References backwardsPlanPath_, xy_goal_tolerance_, and yaw_goal_tolerance_.
Referenced by computeVelocityCommands().

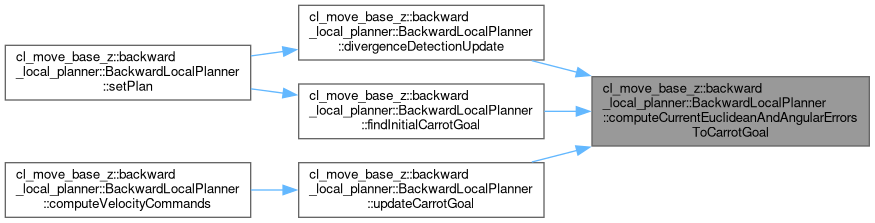
◆ computeCurrentEuclideanAndAngularErrorsToCarrotGoal()
|
private |
Definition at line 99 of file backward_local_planner.cpp.
References backwardsPlanPath_, and currentCarrotPoseIndex_.
Referenced by divergenceDetectionUpdate(), findInitialCarrotGoal(), and updateCarrotGoal().
◆ computeNewPositions()
|
private |
Definition at line 862 of file backward_local_planner.cpp.
Referenced by generateTrajectory().

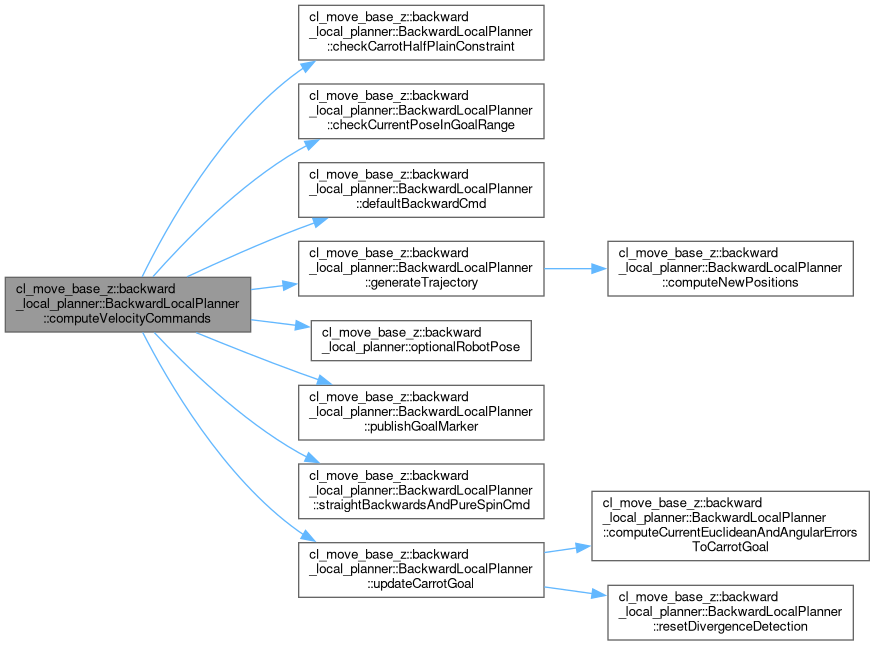
◆ computeVelocityCommands()
|
overridevirtual |
Given the current position, orientation, and velocity of the robot: compute velocity commands to send to the robot mobile base.
- Parameters
-
cmd_vel Will be filled with the velocity command to be passed to the robot base
- Returns
- True if a valid velocity command was found, false otherwise
Definition at line 331 of file backward_local_planner.cpp.
References alpha_offset_, backwardsPlanPath_, betta_offset_, checkCarrotHalfPlainConstraint(), checkCurrentPoseInGoalRange(), costmapRos_, currentCarrotPoseIndex_, defaultBackwardCmd(), enable_obstacle_checking_, generateTrajectory(), goalReached_, inGoalPureSpinningState_, k_alpha_, k_betta_, k_rho_, max_angular_z_speed_, max_linear_x_speed_, cl_move_base_z::backward_local_planner::optionalRobotPose(), publishGoalMarker(), straightBackwardsAndPureSpinCmd(), straightBackwardsAndPureSpinningMode_, updateCarrotGoal(), waiting_, waitingStamp_, waitingTimeout_, and xy_goal_tolerance_.
◆ defaultBackwardCmd()
|
private |
Definition at line 266 of file backward_local_planner.cpp.
Referenced by computeVelocityCommands().

◆ divergenceDetectionUpdate()
|
private |
Definition at line 181 of file backward_local_planner.cpp.
References computeCurrentEuclideanAndAngularErrorsToCarrotGoal(), and divergenceDetectionLastCarrotLinearDistance_.
Referenced by setPlan().


◆ findInitialCarrotGoal()
|
private |
Definition at line 633 of file backward_local_planner.cpp.
References backwardsPlanPath_, carrot_angular_distance_, carrot_distance_, computeCurrentEuclideanAndAngularErrorsToCarrotGoal(), and currentCarrotPoseIndex_.
Referenced by setPlan().


◆ generateTrajectory()
|
private |
Definition at line 800 of file backward_local_planner.cpp.
References computeNewPositions().
Referenced by computeVelocityCommands().


◆ initialize() [1/3]
| void cl_move_base_z::backward_local_planner::BackwardLocalPlanner::initialize | ( | ) |
Definition at line 40 of file backward_local_planner.cpp.
References carrot_angular_distance_, carrot_distance_, currentCarrotPoseIndex_, enable_obstacle_checking_, f, goalMarkerPublisher_, k_alpha_, k_betta_, k_rho_, linear_mode_rho_error_threshold_, max_angular_z_speed_, max_linear_x_speed_, paramServer_, reconfigCB(), straightBackwardsAndPureSpinningMode_, waitingTimeout_, xy_goal_tolerance_, and yaw_goal_tolerance_.
Referenced by initialize().


◆ initialize() [2/3]
| void cl_move_base_z::backward_local_planner::BackwardLocalPlanner::initialize | ( | std::string | name, |
| tf2_ros::Buffer * | tf, | ||
| costmap_2d::Costmap2DROS * | costmapRos_ | ||
| ) |
Definition at line 34 of file backward_local_planner.cpp.
References costmapRos_, and initialize().

◆ initialize() [3/3]
| void cl_move_base_z::backward_local_planner::BackwardLocalPlanner::initialize | ( | std::string | name, |
| tf::TransformListener * | tf, | ||
| costmap_2d::Costmap2DROS * | costmap_ros | ||
| ) |
Constructs the local planner.
- Parameters
-
name The name to give this instance of the local planner tf A pointer to a transform listener costmap_ros The cost map to use for assigning costs to local plans
Definition at line 93 of file backward_local_planner.cpp.
References costmapRos_, and initialize().

◆ isGoalReached()
|
overridevirtual |
Check if the goal pose has been achieved by the local planner.
- Returns
- True if achieved, false otherwise
Definition at line 627 of file backward_local_planner.cpp.
References goalReached_.
◆ publishGoalMarker()
|
private |
Definition at line 876 of file backward_local_planner.cpp.
References costmapRos_, and goalMarkerPublisher_.
Referenced by computeVelocityCommands().

◆ reconfigCB()
|
private |
Definition at line 590 of file backward_local_planner.cpp.
References carrot_angular_distance_, carrot_distance_, enable_obstacle_checking_, k_alpha_, k_betta_, k_rho_, straightBackwardsAndPureSpinningMode_, xy_goal_tolerance_, and yaw_goal_tolerance_.
Referenced by initialize().

◆ resamplePrecisePlan()
|
private |
Definition at line 681 of file backward_local_planner.cpp.
References backwardsPlanPath_, carrot_angular_distance_, and carrot_distance_.
Referenced by setPlan().

◆ resetDivergenceDetection()
|
private |
Definition at line 174 of file backward_local_planner.cpp.
References divergenceDetectionLastCarrotLinearDistance_.
Referenced by setPlan(), and updateCarrotGoal().

◆ setPlan()
|
overridevirtual |
Set the plan that the local planner is following.
- Parameters
-
plan The plan to pass to the local planner
- Returns
- True if the plan was updated successfully, false otherwise
Definition at line 760 of file backward_local_planner.cpp.
References backwardsPlanPath_, costmapRos_, currentCarrotPoseIndex_, divergenceDetectionUpdate(), findInitialCarrotGoal(), goalReached_, inGoalPureSpinningState_, initialPureSpinningStage_, cl_move_base_z::backward_local_planner::optionalRobotPose(), resamplePrecisePlan(), and resetDivergenceDetection().
◆ straightBackwardsAndPureSpinCmd()
|
private |
pureSpinningCmd()
Definition at line 276 of file backward_local_planner.cpp.
References k_alpha_, k_betta_, k_rho_, linear_mode_rho_error_threshold_, and yaw_goal_tolerance_.
Referenced by computeVelocityCommands().

◆ updateCarrotGoal()
|
private |
Definition at line 131 of file backward_local_planner.cpp.
References backwardsPlanPath_, carrot_angular_distance_, carrot_distance_, computeCurrentEuclideanAndAngularErrorsToCarrotGoal(), currentCarrotPoseIndex_, resetDivergenceDetection(), and xy_goal_tolerance_.
Referenced by computeVelocityCommands().

Member Data Documentation
◆ alpha_offset_
|
private |
Definition at line 113 of file backward_local_planner.h.
Referenced by computeVelocityCommands().
◆ backwardsPlanPath_
|
private |
Definition at line 96 of file backward_local_planner.h.
Referenced by checkCarrotHalfPlainConstraint(), checkCurrentPoseInGoalRange(), computeCurrentEuclideanAndAngularErrorsToCarrotGoal(), computeVelocityCommands(), findInitialCarrotGoal(), resamplePrecisePlan(), setPlan(), and updateCarrotGoal().
◆ betta_offset_
|
private |
Definition at line 114 of file backward_local_planner.h.
Referenced by computeVelocityCommands().
◆ carrot_angular_distance_
|
private |
Definition at line 120 of file backward_local_planner.h.
Referenced by findInitialCarrotGoal(), initialize(), reconfigCB(), resamplePrecisePlan(), and updateCarrotGoal().
◆ carrot_distance_
|
private |
Definition at line 119 of file backward_local_planner.h.
Referenced by findInitialCarrotGoal(), initialize(), reconfigCB(), resamplePrecisePlan(), and updateCarrotGoal().
◆ costmapRos_
|
private |
Definition at line 97 of file backward_local_planner.h.
Referenced by computeVelocityCommands(), initialize(), publishGoalMarker(), and setPlan().
◆ currentCarrotPoseIndex_
|
private |
Definition at line 127 of file backward_local_planner.h.
Referenced by checkCarrotHalfPlainConstraint(), computeCurrentEuclideanAndAngularErrorsToCarrotGoal(), computeVelocityCommands(), findInitialCarrotGoal(), initialize(), setPlan(), and updateCarrotGoal().
◆ divergenceDetectionLastCarrotLinearDistance_
|
private |
Definition at line 121 of file backward_local_planner.h.
Referenced by divergenceDetectionUpdate(), and resetDivergenceDetection().
◆ enable_obstacle_checking_
|
private |
Definition at line 110 of file backward_local_planner.h.
Referenced by computeVelocityCommands(), initialize(), and reconfigCB().
◆ f
|
private |
Definition at line 94 of file backward_local_planner.h.
Referenced by initialize().
◆ goalMarkerPublisher_
|
private |
Definition at line 99 of file backward_local_planner.h.
Referenced by initialize(), and publishGoalMarker().
◆ goalReached_
|
private |
Definition at line 107 of file backward_local_planner.h.
Referenced by computeVelocityCommands(), isGoalReached(), and setPlan().
◆ inGoalPureSpinningState_
|
private |
Definition at line 111 of file backward_local_planner.h.
Referenced by computeVelocityCommands(), and setPlan().
◆ initialPureSpinningStage_
|
private |
Definition at line 108 of file backward_local_planner.h.
Referenced by setPlan().
◆ k_alpha_
|
private |
Definition at line 102 of file backward_local_planner.h.
Referenced by computeVelocityCommands(), initialize(), reconfigCB(), and straightBackwardsAndPureSpinCmd().
◆ k_betta_
|
private |
Definition at line 103 of file backward_local_planner.h.
Referenced by computeVelocityCommands(), initialize(), reconfigCB(), and straightBackwardsAndPureSpinCmd().
◆ k_rho_
|
private |
Definition at line 101 of file backward_local_planner.h.
Referenced by computeVelocityCommands(), initialize(), reconfigCB(), and straightBackwardsAndPureSpinCmd().
◆ linear_mode_rho_error_threshold_
|
private |
Definition at line 105 of file backward_local_planner.h.
Referenced by initialize(), and straightBackwardsAndPureSpinCmd().
◆ max_angular_z_speed_
|
private |
Definition at line 124 of file backward_local_planner.h.
Referenced by computeVelocityCommands(), and initialize().
◆ max_linear_x_speed_
|
private |
Definition at line 123 of file backward_local_planner.h.
Referenced by computeVelocityCommands(), and initialize().
◆ paramServer_
|
private |
Definition at line 93 of file backward_local_planner.h.
Referenced by initialize().
◆ pure_spinning_allowed_betta_error_
|
private |
Definition at line 104 of file backward_local_planner.h.
◆ straightBackwardsAndPureSpinningMode_
|
private |
Definition at line 109 of file backward_local_planner.h.
Referenced by computeVelocityCommands(), initialize(), and reconfigCB().
◆ waiting_
|
private |
Definition at line 133 of file backward_local_planner.h.
Referenced by computeVelocityCommands().
◆ waitingStamp_
|
private |
Definition at line 135 of file backward_local_planner.h.
Referenced by computeVelocityCommands().
◆ waitingTimeout_
|
private |
Definition at line 134 of file backward_local_planner.h.
Referenced by computeVelocityCommands(), and initialize().
◆ xy_goal_tolerance_
|
private |
Definition at line 117 of file backward_local_planner.h.
Referenced by checkCurrentPoseInGoalRange(), computeVelocityCommands(), initialize(), reconfigCB(), and updateCarrotGoal().
◆ yaw_goal_tolerance_
|
private |
Definition at line 116 of file backward_local_planner.h.
Referenced by checkCurrentPoseInGoalRange(), initialize(), reconfigCB(), and straightBackwardsAndPureSpinCmd().
The documentation for this class was generated from the following files:
- smacc_client_library/move_base_z_client/custom_planners/backward_local_planner/include/backward_local_planner/backward_local_planner.h
- smacc_client_library/move_base_z_client/custom_planners/backward_local_planner/src/backward_local_planner.cpp