#include <st_acquire_sensors.hpp>
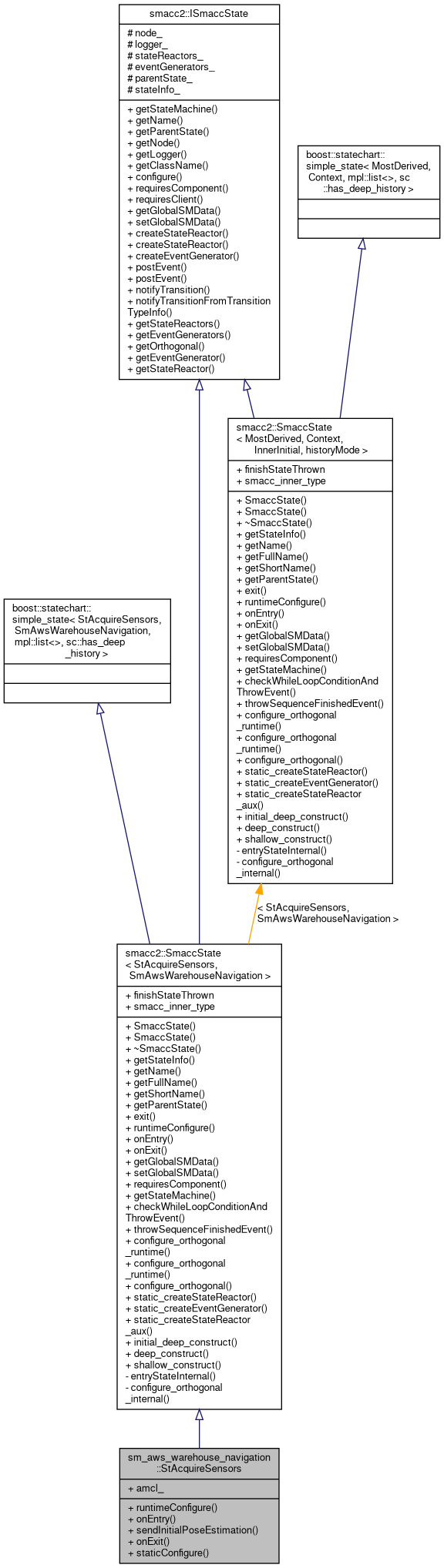
Inheritance diagram for sm_aws_warehouse_navigation::StAcquireSensors:
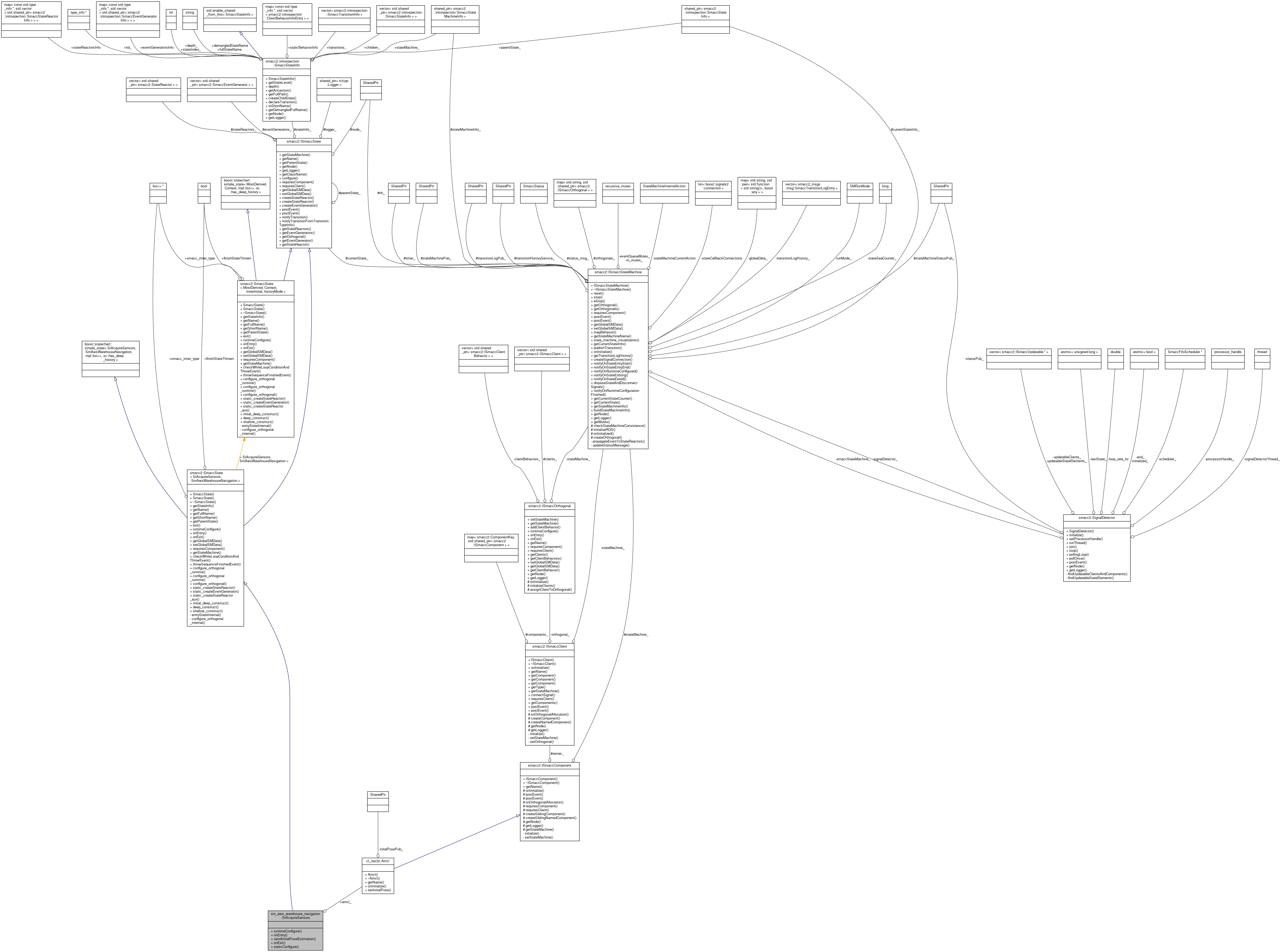
Collaboration diagram for sm_aws_warehouse_navigation::StAcquireSensors:
Public Types | |
| typedef mpl::list< Transition< EvCbSuccess< CbWaitTransform, OrNavigation >, StStartNavigation, SUCCESS > > | reactions |
 Public Types inherited from smacc2::SmaccState< StAcquireSensors, SmAwsWarehouseNavigation > Public Types inherited from smacc2::SmaccState< StAcquireSensors, SmAwsWarehouseNavigation > | |
| typedef SmAwsWarehouseNavigation | TContext |
| typedef Context::inner_context_type | context_type |
| typedef context_type::state_iterator | state_iterator |
| typedef mpl::list<> | LastDeepState |
| typedef base_type::outermost_context_base_type | outermost_context_base_type |
| typedef base_type::inner_context_ptr_type | inner_context_ptr_type |
| typedef base_type::context_ptr_type | context_ptr_type |
| typedef base_type::inner_initial_list | inner_initial_list |
Public Member Functions | |
| void | runtimeConfigure () |
| void | onEntry () |
| void | sendInitialPoseEstimation () |
| void | onExit () |
| Public Member Functions inherited from smacc2::SmaccState< StAcquireSensors, SmAwsWarehouseNavigation > | |
| SmaccState ()=delete | |
| SmaccState (my_context ctx) | |
| virtual | ~SmaccState () |
| const smacc2::introspection::SmaccStateInfo * | getStateInfo () |
| std::string | getName () override |
| std::string | getFullName () |
| std::string | getShortName () |
| virtual ISmaccState * | getParentState () |
| void | exit () |
| void | runtimeConfigure () |
| void | onEntry () |
| void | onExit () |
| bool | getGlobalSMData (std::string name, T &ret) |
| void | setGlobalSMData (std::string name, T value) |
| void | requiresComponent (SmaccComponentType *&storage) |
| virtual ISmaccStateMachine & | getStateMachine () |
| void | checkWhileLoopConditionAndThrowEvent (bool(MostDerived::*conditionFn)()) |
| void | throwSequenceFinishedEvent () |
| Public Member Functions inherited from smacc2::ISmaccState | |
| virtual ISmaccStateMachine & | getStateMachine ()=0 |
| virtual std::string | getName ()=0 |
| ISmaccState * | getParentState () |
| rclcpp::Node::SharedPtr & | getNode () |
| rclcpp::Logger | getLogger () |
| virtual std::string | getClassName () |
| template<typename TOrthogonal , typename TBehavior , typename... Args> | |
| std::shared_ptr< TBehavior > | configure (Args &&... args) |
| template<typename SmaccComponentType > | |
| void | requiresComponent (SmaccComponentType *&storage) |
| template<typename SmaccClientType > | |
| void | requiresClient (SmaccClientType *&storage) |
| template<typename T > | |
| bool | getGlobalSMData (std::string name, T &ret) |
| template<typename T > | |
| void | setGlobalSMData (std::string name, T value) |
| template<typename TStateReactor , typename TTriggerEvent , typename TEventList , typename... TEvArgs> | |
| std::shared_ptr< TStateReactor > | createStateReactor (TEvArgs... args) |
| template<typename TStateReactor , typename... TEvArgs> | |
| std::shared_ptr< TStateReactor > | createStateReactor (TEvArgs... args) |
| template<typename TEventGenerator , typename... TEvArgs> | |
| std::shared_ptr< TEventGenerator > | createEventGenerator (TEvArgs... args) |
| template<typename EventType > | |
| void | postEvent (const EventType &ev) |
| template<typename EventType > | |
| void | postEvent () |
| template<typename TransitionType > | |
| void | notifyTransition () |
| void | notifyTransitionFromTransitionTypeInfo (std::shared_ptr< smacc2::introspection::TypeInfo > &transitionTypeInfo) |
| std::vector< std::shared_ptr< StateReactor > > & | getStateReactors () |
| std::vector< std::shared_ptr< SmaccEventGenerator > > & | getEventGenerators () |
| template<typename TOrthogonal > | |
| TOrthogonal * | getOrthogonal () |
| template<typename TEventGenerator > | |
| TEventGenerator * | getEventGenerator () |
| template<typename TStateReactor > | |
| TStateReactor * | getStateReactor () |
Static Public Member Functions | |
| static void | staticConfigure () |
| Static Public Member Functions inherited from smacc2::SmaccState< StAcquireSensors, SmAwsWarehouseNavigation > | |
| static void | configure_orthogonal_runtime (std::function< void(TBehavior &bh, StAcquireSensors &)> initializationFunction) |
| static void | configure_orthogonal_runtime (std::function< void(TBehavior &bh)> initializationFunction) |
| static void | configure_orthogonal (Args &&... args) |
| static std::shared_ptr< smacc2::introspection::StateReactorHandler > | static_createStateReactor (TArgs... args) |
| static std::shared_ptr< smacc2::introspection::EventGeneratorHandler > | static_createEventGenerator (TUArgs... args) |
| static std::shared_ptr< smacc2::introspection::StateReactorHandler > | static_createStateReactor_aux (TUArgs... args) |
| static void | initial_deep_construct (outermost_context_base_type &outermostContextBase) |
| static void | deep_construct (const context_ptr_type &pContext, outermost_context_base_type &outermostContextBase) |
| static inner_context_ptr_type | shallow_construct (const context_ptr_type &pContext, outermost_context_base_type &outermostContextBase) |
Public Attributes | |
| cl_nav2z::Amcl * | amcl_ |
| Public Attributes inherited from smacc2::SmaccState< StAcquireSensors, SmAwsWarehouseNavigation > | |
| bool | finishStateThrown |
| mpl::list<> * | smacc_inner_type |
Additional Inherited Members | |
| Protected Attributes inherited from smacc2::ISmaccState | |
| rclcpp::Node::SharedPtr | node_ |
| std::shared_ptr< rclcpp::Logger > | logger_ |
| std::vector< std::shared_ptr< StateReactor > > | stateReactors_ |
| std::vector< std::shared_ptr< smacc2::SmaccEventGenerator > > | eventGenerators_ |
| ISmaccState * | parentState_ |
| const smacc2::introspection::SmaccStateInfo * | stateInfo_ |
Detailed Description
Definition at line 23 of file st_acquire_sensors.hpp.
Member Typedef Documentation
◆ reactions
| typedef mpl::list< Transition<EvCbSuccess<CbWaitTransform, OrNavigation>, StStartNavigation, SUCCESS> > sm_aws_warehouse_navigation::StAcquireSensors::reactions |
Definition at line 33 of file st_acquire_sensors.hpp.
Member Function Documentation
◆ onEntry()
|
inline |
Definition at line 61 of file st_acquire_sensors.hpp.
62 {
63 //sendInitialPoseEstimation();
64 //auto res = exec("ros2");
65 //RCLCPP_INFO(getLogger(), "launch result: %s", res.c_str());
66 }
◆ onExit()
|
inline |
Definition at line 97 of file st_acquire_sensors.hpp.
97{}
◆ runtimeConfigure()
|
inline |
Definition at line 50 of file st_acquire_sensors.hpp.
51 {
52 // illegal wait workaround
53 // rclcpp::sleep_for(6s);
54
55 // ClNav2Z * navClient;
56 // getOrthogonal<OrNavigation>()->requiresClient(navClient);
57
58 // amcl_ = navClient->getComponent<Amcl>();
59 }
◆ sendInitialPoseEstimation()
|
inline |
Definition at line 68 of file st_acquire_sensors.hpp.
69 {
70 geometry_msgs::msg::PoseWithCovarianceStamped initialposemsg;
71 //bool useSimTime = getNode()->get_parameter("use_sim_time").as_bool();
72 //getNode()->set_parameter("use_sim_time",true);
73
74 initialposemsg.header.stamp = getNode()->now();
75 initialposemsg.header.frame_id = "map";
76
77 initialposemsg.pose.pose.position.x = 3.415412425994873;
78 initialposemsg.pose.pose.position.y = 2.0;
79 initialposemsg.pose.pose.position.z = 0;
80
81 initialposemsg.pose.pose.orientation.x = 0;
82 initialposemsg.pose.pose.orientation.y = 0;
83 initialposemsg.pose.pose.orientation.z = 1;
84 initialposemsg.pose.pose.orientation.w = 0;
85
86 //z: 0.9999985465626609
87 // w: 0.00170495529732811
88
89 initialposemsg.pose.covariance = {
90 0.25, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.25, 0.0, 0.0, 0.0, 0.0,
91 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0,
92 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.06853891909122467};
93
95 }
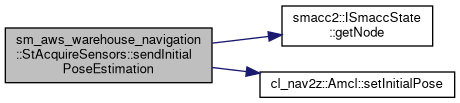
References amcl_, smacc2::ISmaccState::getNode(), and cl_nav2z::Amcl::setInitialPose().
Here is the call graph for this function:
◆ staticConfigure()
|
inlinestatic |
Definition at line 38 of file st_acquire_sensors.hpp.
39 {
41
42 //configure_orthogonal<OrNavigation, CbWaitPose>();
43 // configure_orthogonal<OrNavigation, CbWaitActionServer>(std::chrono::milliseconds(10000));
44 // configure_orthogonal<OrNavigation, CbWaitNav2Nodes>(std::vector<Nav2Nodes>{
45 // Nav2Nodes::PlannerServer, Nav2Nodes::ControllerServer, Nav2Nodes::BtNavigator});
46 }
References service_node_3::s.
Member Data Documentation
◆ amcl_
| cl_nav2z::Amcl* sm_aws_warehouse_navigation::StAcquireSensors::amcl_ |
Definition at line 35 of file st_acquire_sensors.hpp.
Referenced by sendInitialPoseEstimation().
The documentation for this struct was generated from the following file:
- smacc2_sm_reference_library/sm_aws_warehouse_navigation/include/sm_aws_warehouse_navigation/states/st_acquire_sensors.hpp