#include <or_navigation.hpp>
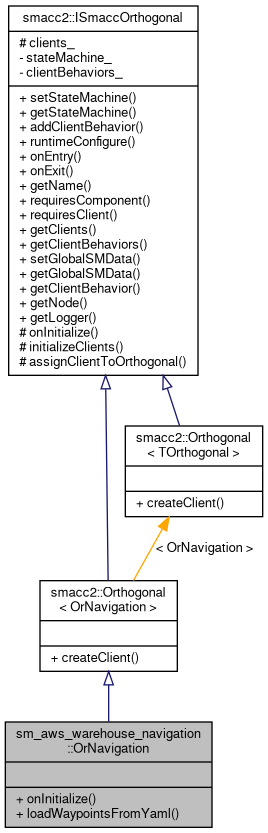
Inheritance diagram for sm_aws_warehouse_navigation::OrNavigation:
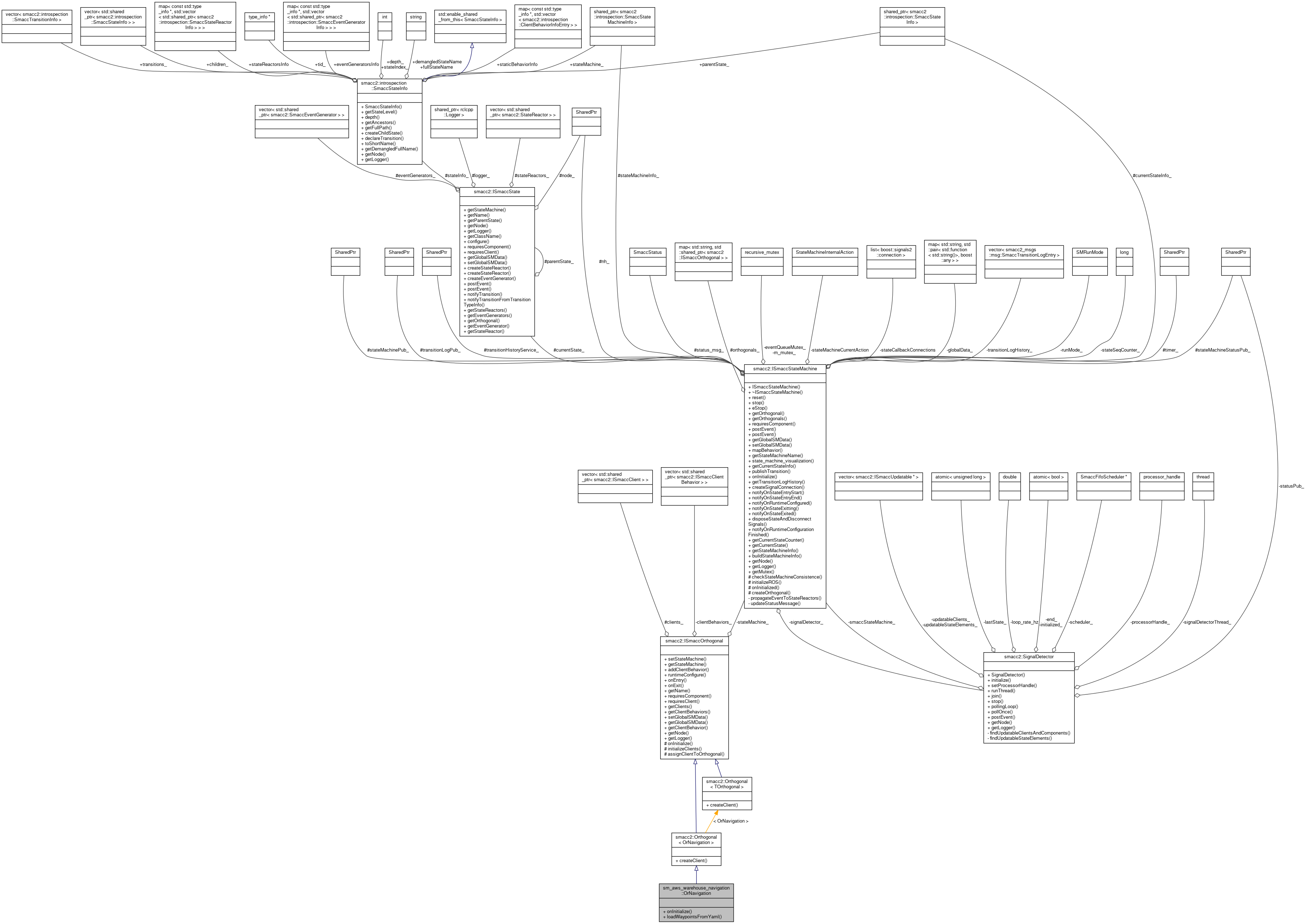
Collaboration diagram for sm_aws_warehouse_navigation::OrNavigation:
Public Member Functions | |
| void | onInitialize () override |
| void | loadWaypointsFromYaml (WaypointNavigator *waypointsNavigator) |
 Public Member Functions inherited from smacc2::Orthogonal< OrNavigation > Public Member Functions inherited from smacc2::Orthogonal< OrNavigation > | |
| std::shared_ptr< ClientHandler< OrNavigation, TClient > > | createClient (TArgs... args) |
| Public Member Functions inherited from smacc2::ISmaccOrthogonal | |
| void | setStateMachine (ISmaccStateMachine *value) |
| ISmaccStateMachine * | getStateMachine () |
| void | addClientBehavior (std::shared_ptr< smacc2::ISmaccClientBehavior > clientBehavior) |
| void | runtimeConfigure () |
| void | onEntry () |
| void | onExit () |
| virtual std::string | getName () const |
| template<typename SmaccComponentType > | |
| void | requiresComponent (SmaccComponentType *&storage) |
| template<typename SmaccClientType > | |
| bool | requiresClient (SmaccClientType *&storage) |
| const std::vector< std::shared_ptr< smacc2::ISmaccClient > > & | getClients () |
| const std::vector< std::shared_ptr< smacc2::ISmaccClientBehavior > > & | getClientBehaviors () const |
| template<typename T > | |
| void | setGlobalSMData (std::string name, T value) |
| template<typename T > | |
| bool | getGlobalSMData (std::string name, T &ret) |
| template<typename TClientBehavior > | |
| TClientBehavior * | getClientBehavior () |
| rclcpp::Node::SharedPtr | getNode () |
| rclcpp::Logger | getLogger () |
Additional Inherited Members | |
| Protected Member Functions inherited from smacc2::ISmaccOrthogonal | |
| virtual void | onInitialize () |
| void | initializeClients () |
| template<typename TOrthogonal , typename TClient > | |
| void | assignClientToOrthogonal (TClient *client) |
| Protected Attributes inherited from smacc2::ISmaccOrthogonal | |
| std::vector< std::shared_ptr< smacc2::ISmaccClient > > | clients_ |
Detailed Description
Definition at line 36 of file or_navigation.hpp.
Member Function Documentation
◆ loadWaypointsFromYaml()
|
inline |
Definition at line 67 of file or_navigation.hpp.
68 {
69 // if it is the first time and the waypoints navigator is not configured
70 std::string planfilepath;
73 {
74 std::string package_share_directory =
75 ament_index_cpp::get_package_share_directory("sm_aws_warehouse_navigation");
76 boost::replace_all(planfilepath, "$(pkg_share)", package_share_directory);
77
78 waypointsNavigator->loadWayPointsFromFile2(planfilepath);
80 }
81 else
82 {
84 exit(0);
85 }
86 }
References smacc2::ISmaccOrthogonal::getLogger(), smacc2::ISmaccOrthogonal::getNode(), and cl_nav2z::WaypointNavigator::loadWayPointsFromFile2().
Here is the call graph for this function:

◆ onInitialize()
|
inlineoverridevirtual |
Reimplemented from smacc2::ISmaccOrthogonal.
Definition at line 39 of file or_navigation.hpp.
40 {
41 auto roslaunchClient =this->createClient<smacc2::client_bases::ClRosLaunch>("sm_aws_warehouse_navigation", "navigation_launch.py");
42
43 auto movebaseClient = this->createClient<cl_nav2z::ClNav2Z>();
44
45 // create pose component
46 movebaseClient->createComponent<cl_nav2z::Pose>(StandardReferenceFrames::Map);
47
48 // create planner switcher
49 movebaseClient->createComponent<cl_nav2z::PlannerSwitcher>();
50
51 // create goal checker switcher
52 movebaseClient->createComponent<cl_nav2z::GoalCheckerSwitcher>();
53
54 // create odom tracker
55 movebaseClient->createComponent<cl_nav2z::odom_tracker::OdomTracker>();
56
57 movebaseClient->createComponent<cl_nav2z::Amcl>();
58
59 // create waypoints navigator component
60 // auto waypointsNavigator = movebaseClient->createComponent<cl_nav2z::WaypointNavigator>();
61 // loadWaypointsFromYaml(waypointsNavigator);
62
63 // // change this to skip some points of the yaml file, default = 0
64 // waypointsNavigator->currentWaypoint_ = 0;
65 }
The documentation for this class was generated from the following file:
- smacc2_sm_reference_library/sm_aws_warehouse_navigation/include/sm_aws_warehouse_navigation/orthogonals/or_navigation.hpp