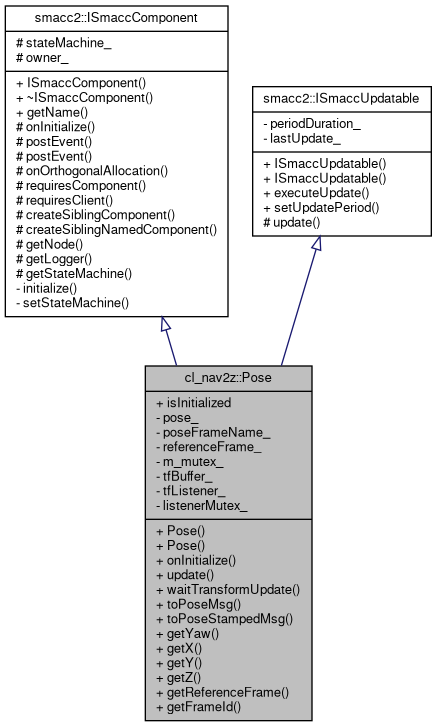
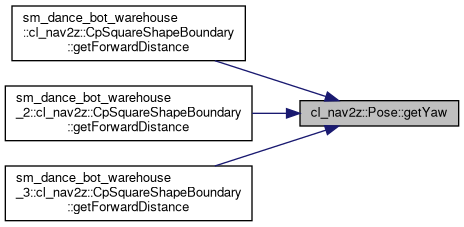
#include <cp_pose.hpp>
Public Member Functions | |
| Pose (std::string poseFrameName="base_link", std::string referenceFrame="odom") | |
| Pose (StandardReferenceFrames referenceFrame) | |
| void | onInitialize () override |
| void | update () override |
| void | waitTransformUpdate (rclcpp::Rate r=rclcpp::Rate(20)) |
| geometry_msgs::msg::Pose | toPoseMsg () |
| geometry_msgs::msg::PoseStamped | toPoseStampedMsg () |
| float | getYaw () |
| float | getX () |
| float | getY () |
| float | getZ () |
| const std::string & | getReferenceFrame () const |
| const std::string & | getFrameId () const |
 Public Member Functions inherited from smacc2::ISmaccComponent Public Member Functions inherited from smacc2::ISmaccComponent | |
| ISmaccComponent () | |
| virtual | ~ISmaccComponent () |
| virtual std::string | getName () const |
| Public Member Functions inherited from smacc2::ISmaccUpdatable | |
| ISmaccUpdatable () | |
| ISmaccUpdatable (rclcpp::Duration duration) | |
| void | executeUpdate (rclcpp::Node::SharedPtr node) |
| void | setUpdatePeriod (rclcpp::Duration duration) |
Public Attributes | |
| bool | isInitialized |
Private Attributes | |
| geometry_msgs::msg::PoseStamped | pose_ |
| std::string | poseFrameName_ |
| std::string | referenceFrame_ |
| std::mutex | m_mutex_ |
Static Private Attributes | |
| static std::shared_ptr< tf2_ros::Buffer > | tfBuffer_ |
| static std::shared_ptr< tf2_ros::TransformListener > | tfListener_ |
| static std::mutex | listenerMutex_ |
Additional Inherited Members | |
| Protected Member Functions inherited from smacc2::ISmaccComponent | |
| virtual void | onInitialize () |
| template<typename EventType > | |
| void | postEvent (const EventType &ev) |
| template<typename EventType > | |
| void | postEvent () |
| template<typename TOrthogonal , typename TSourceObject > | |
| void | onOrthogonalAllocation () |
| template<typename TComponent > | |
| void | requiresComponent (TComponent *&requiredComponentStorage) |
| template<typename TClient > | |
| void | requiresClient (TClient *&requiredClientStorage) |
| template<typename SmaccComponentType , typename TOrthogonal , typename TClient , typename... TArgs> | |
| SmaccComponentType * | createSiblingComponent (TArgs... targs) |
| template<typename SmaccComponentType , typename TOrthogonal , typename TClient , typename... TArgs> | |
| SmaccComponentType * | createSiblingNamedComponent (std::string name, TArgs... targs) |
| rclcpp::Node::SharedPtr | getNode () |
| rclcpp::Logger | getLogger () |
| ISmaccStateMachine * | getStateMachine () |
| virtual void | update ()=0 |
| Protected Attributes inherited from smacc2::ISmaccComponent | |
| ISmaccStateMachine * | stateMachine_ |
| ISmaccClient * | owner_ |
Detailed Description
Definition at line 44 of file cp_pose.hpp.
Constructor & Destructor Documentation
◆ Pose() [1/2]
| cl_nav2z::Pose::Pose | ( | std::string | poseFrameName = "base_link", |
| std::string | referenceFrame = "odom" |
||
| ) |
◆ Pose() [2/2]
| cl_nav2z::Pose::Pose | ( | StandardReferenceFrames | referenceFrame | ) |
Definition at line 55 of file cp_pose.cpp.
Member Function Documentation
◆ getFrameId()
|
inline |
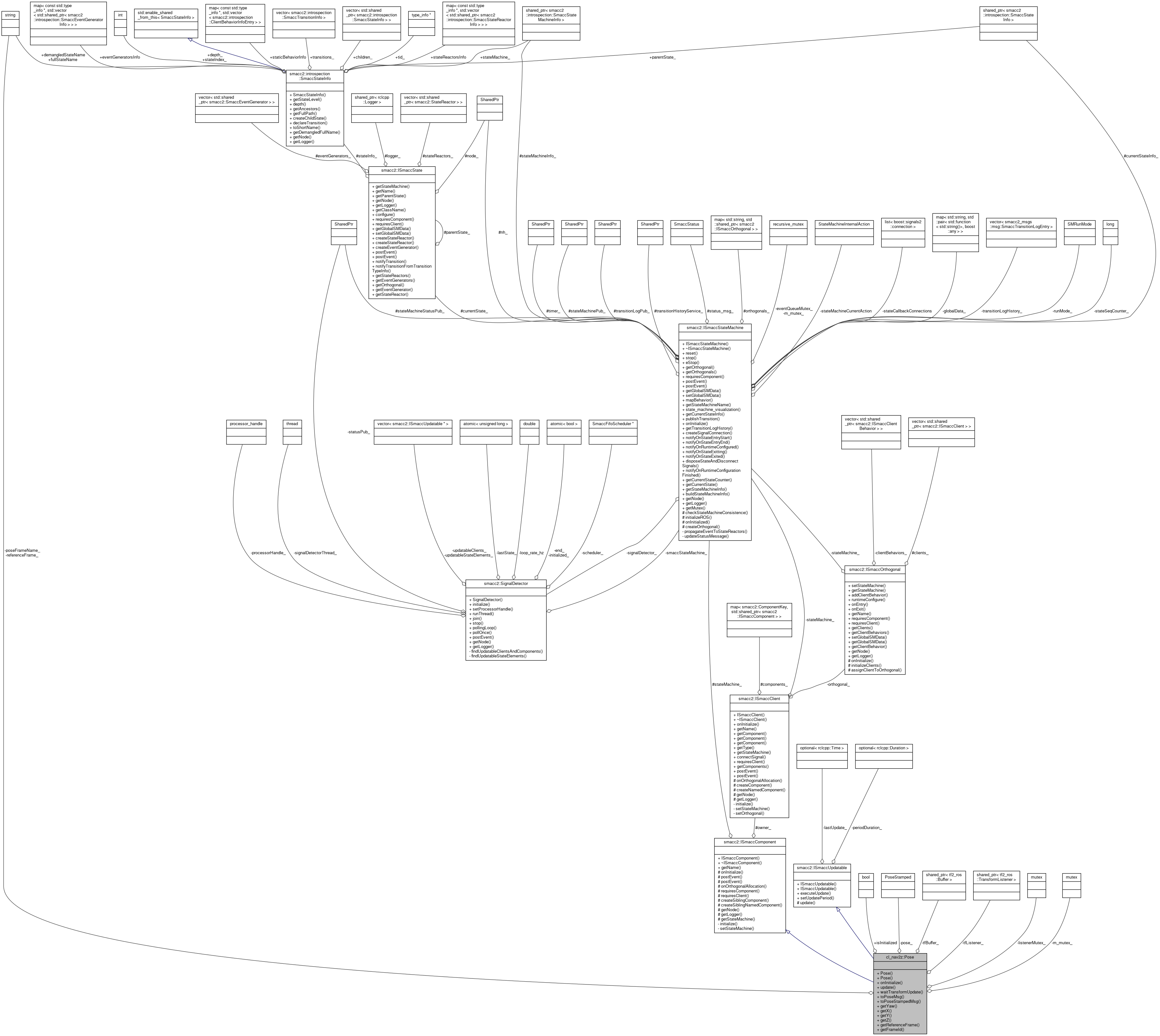
◆ getReferenceFrame()
|
inline |
Definition at line 77 of file cp_pose.hpp.
References referenceFrame_.
Referenced by cl_nav2z::CbNavigateGlobalPosition::execute(), cl_nav2z::CbAbsoluteRotate::onEntry(), cl_nav2z::CbNavigateBackwards::onEntry(), cl_nav2z::CbNavigateForward::onEntry(), and cl_nav2z::CbRotate::onEntry().
◆ getX()
| float cl_nav2z::Pose::getX | ( | ) |
◆ getY()
| float cl_nav2z::Pose::getY | ( | ) |
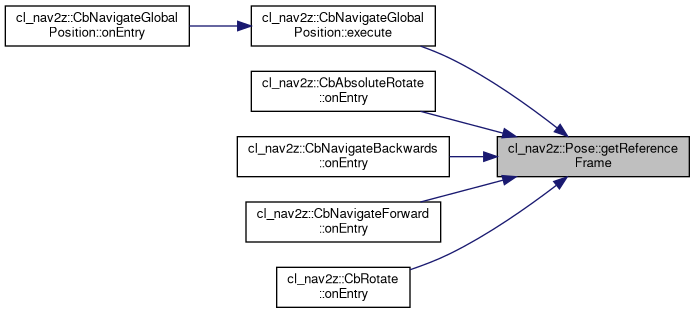
◆ getYaw()
| float cl_nav2z::Pose::getYaw | ( | ) |
Definition at line 118 of file cp_pose.cpp.
References pose_.
Referenced by sm_dance_bot_warehouse::cl_nav2z::CpSquareShapeBoundary::getForwardDistance(), sm_dance_bot_warehouse_2::cl_nav2z::CpSquareShapeBoundary::getForwardDistance(), and sm_dance_bot_warehouse_3::cl_nav2z::CpSquareShapeBoundary::getForwardDistance().
◆ getZ()
| float cl_nav2z::Pose::getZ | ( | ) |
◆ onInitialize()
|
overridevirtual |
Reimplemented from smacc2::ISmaccComponent.
Definition at line 60 of file cp_pose.cpp.
References smacc2::ISmaccComponent::getLogger(), smacc2::ISmaccComponent::getNode(), listenerMutex_, poseFrameName_, referenceFrame_, tfBuffer_, and tfListener_.

◆ toPoseMsg()
|
inline |
Definition at line 58 of file cp_pose.hpp.
References m_mutex_, and pose_.
Referenced by cl_nav2z::WaypointNavigator::sendNextGoal().

◆ toPoseStampedMsg()
|
inline |
◆ update()
|
overridevirtual |
Implements smacc2::ISmaccUpdatable.
Definition at line 124 of file cp_pose.cpp.
References smacc2::ISmaccComponent::getLogger(), smacc2::ISmaccComponent::getNode(), isInitialized, listenerMutex_, m_mutex_, pose_, poseFrameName_, referenceFrame_, and tfBuffer_.

◆ waitTransformUpdate()
| void cl_nav2z::Pose::waitTransformUpdate | ( | rclcpp::Rate | r = rclcpp::Rate(20) | ) |
Definition at line 77 of file cp_pose.cpp.
References smacc2::ISmaccComponent::getLogger(), smacc2::ISmaccComponent::getNode(), isInitialized, listenerMutex_, m_mutex_, pose_, poseFrameName_, referenceFrame_, and tfBuffer_.
Referenced by cl_nav2z::CbWaitPose::onEntry().


Member Data Documentation
◆ isInitialized
| bool cl_nav2z::Pose::isInitialized |
Definition at line 81 of file cp_pose.hpp.
Referenced by update(), and waitTransformUpdate().
◆ listenerMutex_
|
staticprivate |
Definition at line 89 of file cp_pose.hpp.
Referenced by onInitialize(), update(), and waitTransformUpdate().
◆ m_mutex_
|
private |
Definition at line 94 of file cp_pose.hpp.
Referenced by toPoseMsg(), toPoseStampedMsg(), update(), and waitTransformUpdate().
◆ pose_
|
private |
Definition at line 84 of file cp_pose.hpp.
Referenced by getX(), getY(), getYaw(), getZ(), Pose(), toPoseMsg(), toPoseStampedMsg(), update(), and waitTransformUpdate().
◆ poseFrameName_
|
private |
Definition at line 91 of file cp_pose.hpp.
Referenced by getFrameId(), onInitialize(), update(), and waitTransformUpdate().
◆ referenceFrame_
|
private |
Definition at line 92 of file cp_pose.hpp.
Referenced by getReferenceFrame(), onInitialize(), Pose(), update(), and waitTransformUpdate().
◆ tfBuffer_
|
staticprivate |
Definition at line 86 of file cp_pose.hpp.
Referenced by onInitialize(), update(), and waitTransformUpdate().
◆ tfListener_
|
staticprivate |
Definition at line 87 of file cp_pose.hpp.
Referenced by onInitialize().
The documentation for this class was generated from the following files:
- smacc2_client_library/nav2z_client/nav2z_client/include/nav2z_client/components/pose/cp_pose.hpp
- smacc2_client_library/nav2z_client/nav2z_client/src/nav2z_client/components/pose/cp_pose.cpp