#include <cp_square_shape_bondary.hpp>
Inheritance diagram for sm_dance_bot_warehouse_3::cl_nav2z::CpSquareShapeBoundary:
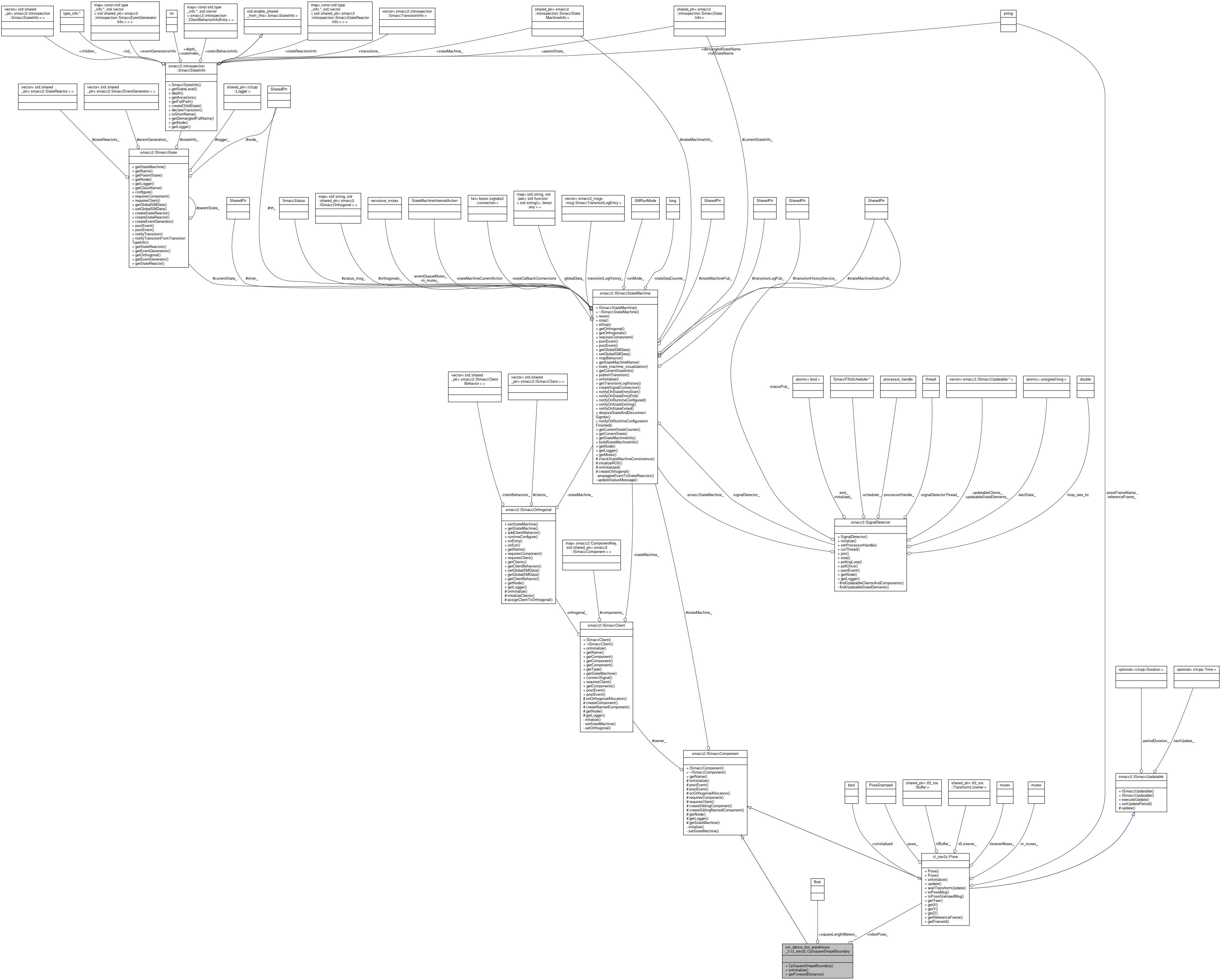
Collaboration diagram for sm_dance_bot_warehouse_3::cl_nav2z::CpSquareShapeBoundary:
Public Member Functions | |
| CpSquareShapeBoundary (float squareLenghtMeters) | |
| void | onInitialize () override |
| float | getForwardDistance () |
 Public Member Functions inherited from smacc2::ISmaccComponent Public Member Functions inherited from smacc2::ISmaccComponent | |
| ISmaccComponent () | |
| virtual | ~ISmaccComponent () |
| virtual std::string | getName () const |
Public Attributes | |
| float | squareLenghtMeters_ |
| ::cl_nav2z::Pose * | robotPose_ |
Additional Inherited Members | |
| Protected Member Functions inherited from smacc2::ISmaccComponent | |
| virtual void | onInitialize () |
| template<typename EventType > | |
| void | postEvent (const EventType &ev) |
| template<typename EventType > | |
| void | postEvent () |
| template<typename TOrthogonal , typename TSourceObject > | |
| void | onOrthogonalAllocation () |
| template<typename TComponent > | |
| void | requiresComponent (TComponent *&requiredComponentStorage) |
| template<typename TClient > | |
| void | requiresClient (TClient *&requiredClientStorage) |
| template<typename SmaccComponentType , typename TOrthogonal , typename TClient , typename... TArgs> | |
| SmaccComponentType * | createSiblingComponent (TArgs... targs) |
| template<typename SmaccComponentType , typename TOrthogonal , typename TClient , typename... TArgs> | |
| SmaccComponentType * | createSiblingNamedComponent (std::string name, TArgs... targs) |
| rclcpp::Node::SharedPtr | getNode () |
| rclcpp::Logger | getLogger () |
| ISmaccStateMachine * | getStateMachine () |
| Protected Attributes inherited from smacc2::ISmaccComponent | |
| ISmaccStateMachine * | stateMachine_ |
| ISmaccClient * | owner_ |
Detailed Description
Definition at line 35 of file cp_square_shape_bondary.hpp.
Constructor & Destructor Documentation
◆ CpSquareShapeBoundary()
|
inline |
Definition at line 41 of file cp_square_shape_bondary.hpp.
Member Function Documentation
◆ getForwardDistance()
|
inline |
Definition at line 52 of file cp_square_shape_bondary.hpp.
53 {
55
56 // warp 0 to 2pi
57 while(currentAngle < 0)
58 {
59 currentAngle+=2*M_PI;
60 }
61
63
64 float fwdist = -1;
65 float x,y;
66
67 if((currentAngle > 0 && currentAngle < M_PI/4 ) // rightside
68 || (currentAngle > 7*M_PI/4 && currentAngle <= 2*M_PI) // rightside
69 || (currentAngle > 3*M_PI/4 && currentAngle <= 5*M_PI/4) // leftside
70 )
71 {
72 float m = tan(currentAngle);
73 x = side;
74 y = m*x;
75
76 fwdist = sqrt(x*x + y*y);
77 }
78 else if((currentAngle > M_PI/4 && currentAngle <= 3*M_PI/4) // top side
79 || (currentAngle > 5*M_PI/4 && currentAngle <= 7*M_PI/4)) // bottom side
80 {
81 float cotan = cos(currentAngle)/sin(currentAngle);
82 y = side;
83 x = cotan*y;
84
85 fwdist = sqrt(x*x + y*y);
86 }
87 else
88 {
90 }
91
92 RCLCPP_INFO_STREAM(getLogger(), "[" << getName() << " ] distance for yaw angle: " << currentAngle << " and square size: "<< squareLenghtMeters_ << " -- dist: " << fwdist <<"(x: "<< x <<" y:" << y <<")");
93
94 return fwdist;
95 }
virtual std::string getName() const
Definition: smacc_component.cpp:46
References smacc2::ISmaccComponent::getLogger(), smacc2::ISmaccComponent::getName(), cl_nav2z::Pose::getYaw(), robotPose_, and squareLenghtMeters_.
Here is the call graph for this function:

◆ onInitialize()
|
inlineoverridevirtual |
Reimplemented from smacc2::ISmaccComponent.
Definition at line 47 of file cp_square_shape_bondary.hpp.
48 {
50 }
void requiresComponent(TComponent *&requiredComponentStorage)
Definition: smacc_component_impl.hpp:37
References smacc2::ISmaccComponent::requiresComponent(), and robotPose_.
Here is the call graph for this function:

Member Data Documentation
◆ robotPose_
| ::cl_nav2z::Pose* sm_dance_bot_warehouse_3::cl_nav2z::CpSquareShapeBoundary::robotPose_ |
Definition at line 39 of file cp_square_shape_bondary.hpp.
Referenced by getForwardDistance(), and onInitialize().
◆ squareLenghtMeters_
| float sm_dance_bot_warehouse_3::cl_nav2z::CpSquareShapeBoundary::squareLenghtMeters_ |
Definition at line 38 of file cp_square_shape_bondary.hpp.
Referenced by getForwardDistance().
The documentation for this class was generated from the following file:
- smacc2_sm_reference_library/sm_dance_bot_warehouse_3/include/sm_dance_bot_warehouse_3/clients/cl_nav2z/components/cp_square_shape_bondary.hpp