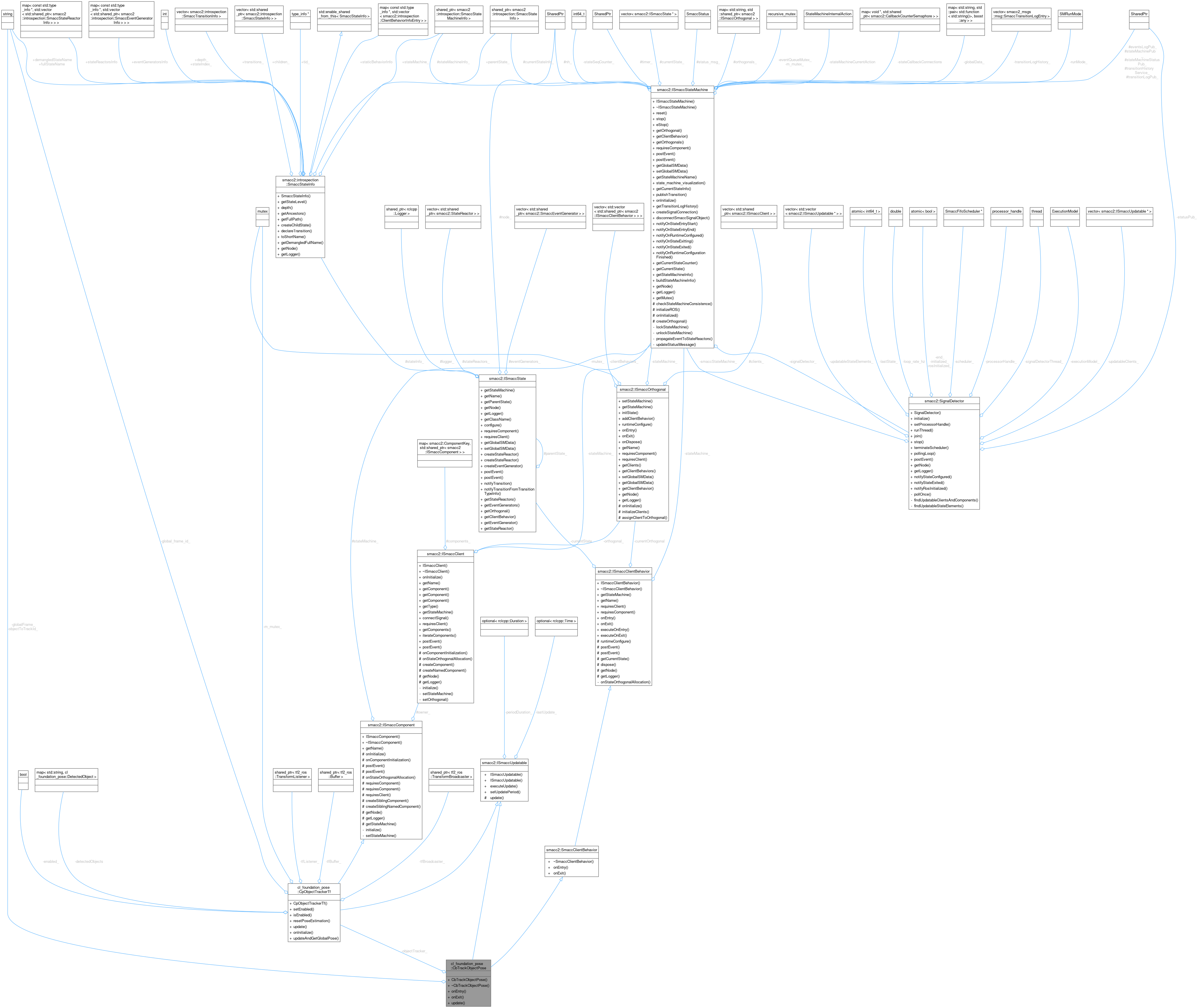
#include <cb_track_object_pose.hpp>
Definition at line 28 of file cb_track_object_pose.hpp.
◆ CbTrackObjectPose()
| cl_foundation_pose::CbTrackObjectPose::CbTrackObjectPose |
( |
std::string | objectToTrackId, |
|
|
std::string | globalFrame = "map" ) |
|
inline |
◆ ~CbTrackObjectPose()
| virtual cl_foundation_pose::CbTrackObjectPose::~CbTrackObjectPose |
( |
| ) |
|
|
inlinevirtual |
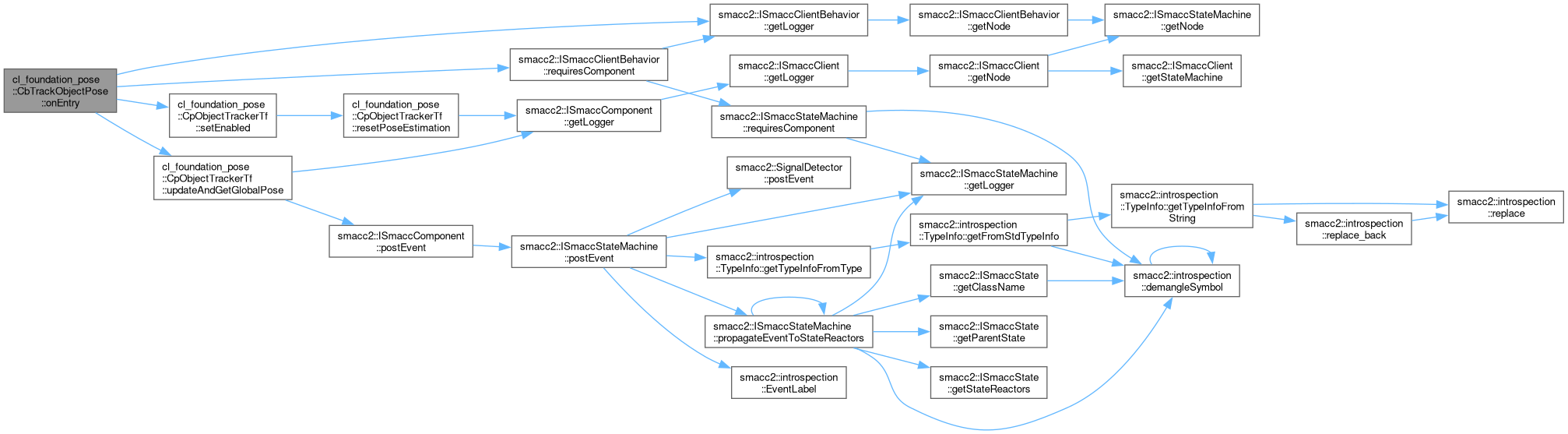
◆ onEntry()
| virtual void cl_foundation_pose::CbTrackObjectPose::onEntry |
( |
| ) |
|
|
inlineoverridevirtual |
Reimplemented from smacc2::ISmaccClientBehavior.
Definition at line 43 of file cb_track_object_pose.hpp.
44 {
46 RCLCPP_INFO(
getLogger(),
"CbTrackObjectPose onEntry");
47 RCLCPP_INFO(
getLogger(),
"CbTrackObjectPose onEntry - enabled");
49 RCLCPP_INFO(
51 "CbTrackObjectPose onEntry - updateAndGetGlobalPose, objectToTrackId: %s, globalFrame: %s",
54 }
cl_foundation_pose::CpObjectTrackerTf * objectTracker_
std::optional< geometry_msgs::msg::PoseStamped > updateAndGetGlobalPose(const std::string &child_frame_id, const std::string &frame_id)
void setEnabled(bool enabled)
virtual rclcpp::Logger getLogger() const
void requiresComponent(SmaccComponentType *&storage, ComponentRequirement requirementType=ComponentRequirement::SOFT)
References smacc2::ISmaccClientBehavior::getLogger(), globalFrame_, objectToTrackId_, objectTracker_, smacc2::ISmaccClientBehavior::requiresComponent(), cl_foundation_pose::CpObjectTrackerTf::setEnabled(), and cl_foundation_pose::CpObjectTrackerTf::updateAndGetGlobalPose().
◆ onExit()
| virtual void cl_foundation_pose::CbTrackObjectPose::onExit |
( |
| ) |
|
|
inlineoverridevirtual |
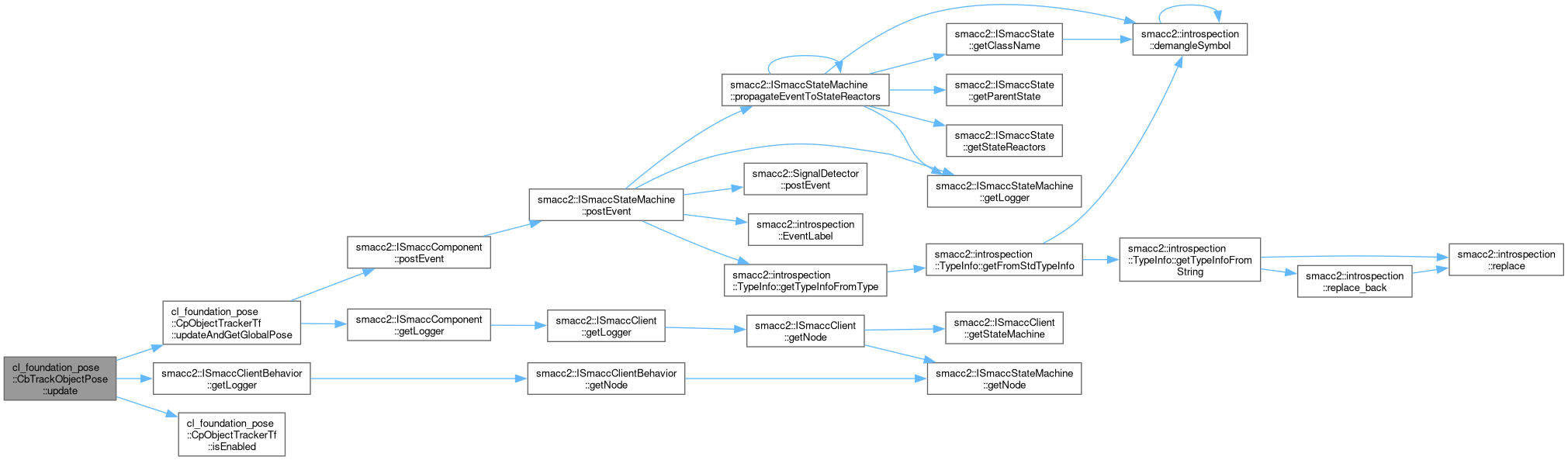
◆ update()
| virtual void cl_foundation_pose::CbTrackObjectPose::update |
( |
| ) |
|
|
inlineoverridevirtual |
◆ globalFrame_
| std::string cl_foundation_pose::CbTrackObjectPose::globalFrame_ |
|
private |
◆ objectToTrackId_
| std::string cl_foundation_pose::CbTrackObjectPose::objectToTrackId_ |
|
private |
◆ objectTracker_
The documentation for this class was generated from the following file:
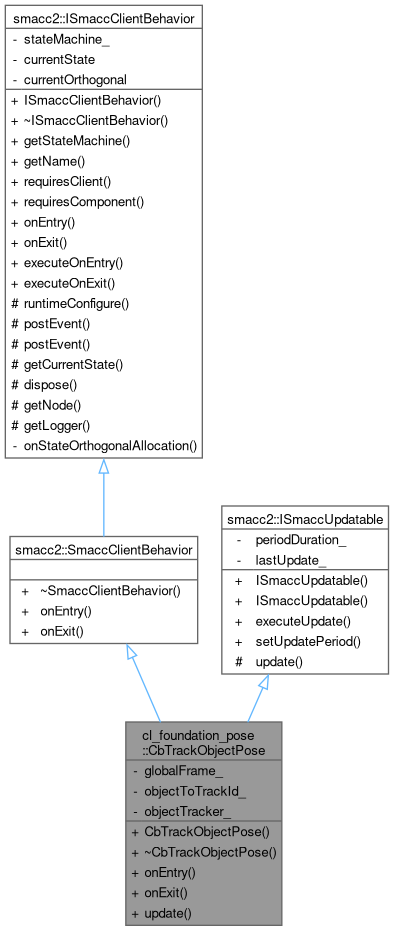
 Public Member Functions inherited from smacc2::SmaccClientBehavior
Public Member Functions inherited from smacc2::SmaccClientBehavior