cp_motion_planner.hpp File Reference
#include <smacc2/component.hpp>#include <cl_moveit2z/cl_moveit2z.hpp>#include <moveit/move_group_interface/move_group_interface.h>#include <geometry_msgs/msg/pose_stamped.hpp>#include <moveit_msgs/msg/move_it_error_codes.hpp>#include <moveit_msgs/msg/robot_trajectory.hpp>#include <map>#include <optional>#include <string>
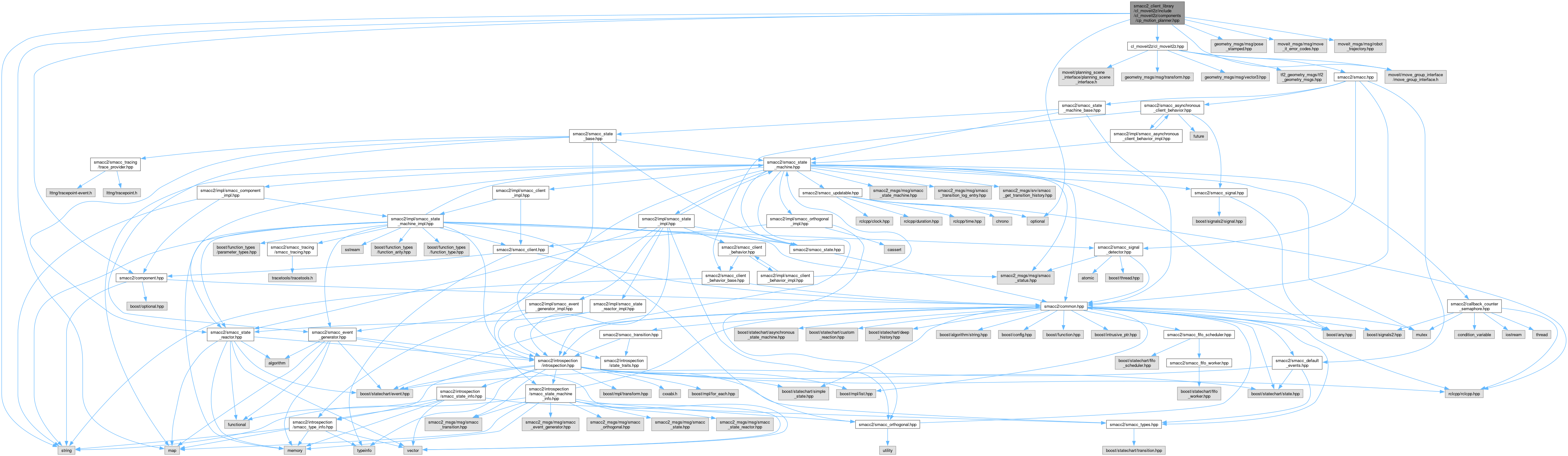
Include dependency graph for cp_motion_planner.hpp:
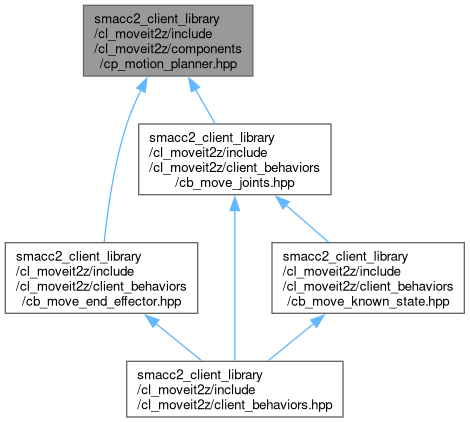
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | cl_moveit2z::PlanningOptions |
| Configuration options for motion planning. More... | |
| struct | cl_moveit2z::PlanningResult |
| Result of a planning operation. More... | |
| class | cl_moveit2z::CpMotionPlanner |
| Component for centralized motion planning operations. More... | |
Namespaces | |
| namespace | cl_moveit2z |
Generated by