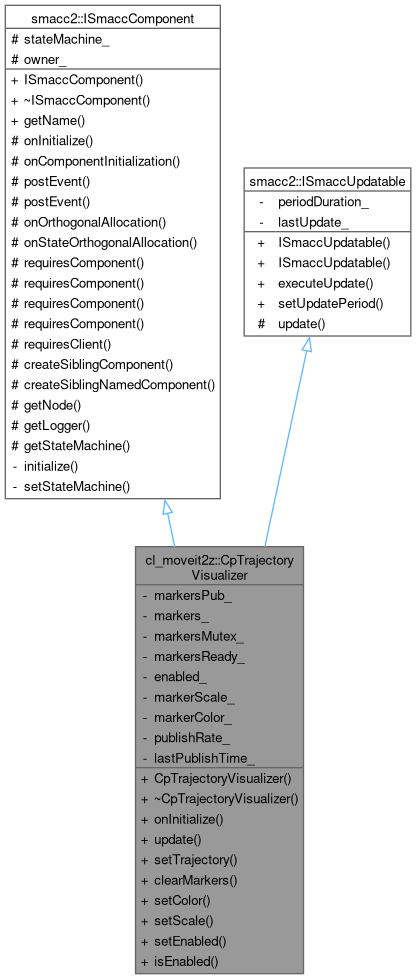
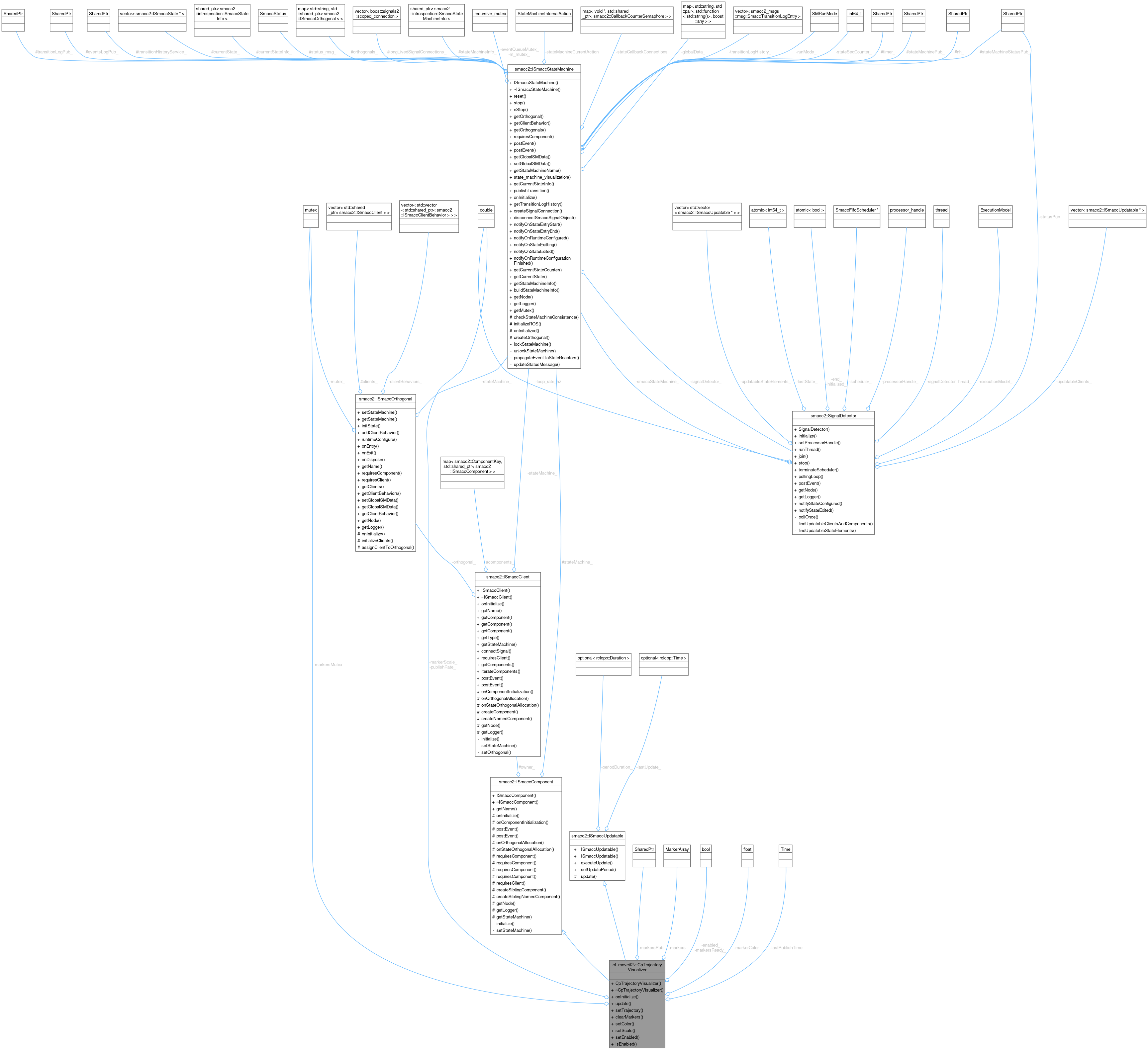
Component for visualizing trajectories as RViz markers. More...
#include <cp_trajectory_visualizer.hpp>
Public Member Functions | |
| CpTrajectoryVisualizer (double publishRate=10.0) | |
| Constructor. | |
| virtual | ~CpTrajectoryVisualizer ()=default |
| void | onInitialize () override |
| Initialize the marker publisher. | |
| void | update () override |
| Periodic update - publishes markers if enabled. | |
| void | setTrajectory (const std::vector< geometry_msgs::msg::PoseStamped > &poses, const std::string &ns="trajectory") |
| Set trajectory to visualize. | |
| void | clearMarkers () |
| Clear all markers. | |
| void | setColor (float r, float g, float b, float a=1.0) |
| Set marker color (RGBA values 0.0-1.0) | |
| void | setScale (double scale) |
| Set marker scale (sphere diameter in meters) | |
| void | setEnabled (bool enabled) |
| Enable/disable marker publishing. | |
| bool | isEnabled () const |
| Check if visualizer is enabled. | |
 Public Member Functions inherited from smacc2::ISmaccComponent Public Member Functions inherited from smacc2::ISmaccComponent | |
| ISmaccComponent () | |
| virtual | ~ISmaccComponent () |
| virtual std::string | getName () const |
| Public Member Functions inherited from smacc2::ISmaccUpdatable | |
| ISmaccUpdatable () | |
| ISmaccUpdatable (rclcpp::Duration duration) | |
| void | executeUpdate (rclcpp::Node::SharedPtr node) |
| void | setUpdatePeriod (rclcpp::Duration duration) |
Private Attributes | |
| rclcpp::Publisher< visualization_msgs::msg::MarkerArray >::SharedPtr | markersPub_ |
| visualization_msgs::msg::MarkerArray | markers_ |
| std::mutex | markersMutex_ |
| bool | markersReady_ = false |
| bool | enabled_ = false |
| double | markerScale_ = 0.02 |
| float | markerColor_ [4] = {0.0f, 1.0f, 0.0f, 0.8f} |
| double | publishRate_ |
| rclcpp::Time | lastPublishTime_ |
Additional Inherited Members | |
| Protected Member Functions inherited from smacc2::ISmaccComponent | |
| template<typename TOrthogonal , typename TClient > | |
| void | onComponentInitialization () |
| template<typename EventType > | |
| void | postEvent (const EventType &ev) |
| template<typename EventType > | |
| void | postEvent () |
| template<typename TOrthogonal , typename TSourceObject > | |
| void | onOrthogonalAllocation () |
| template<typename TOrthogonal , typename TSourceObject > | |
| void | onStateOrthogonalAllocation () |
| template<typename TComponent > | |
| void | requiresComponent (TComponent *&requiredComponentStorage, bool throwExceptionIfNotExist) |
| template<typename TComponent > | |
| void | requiresComponent (std::string name, TComponent *&requiredComponentStorage, bool throwExceptionIfNotExist) |
| template<typename TComponent > | |
| void | requiresComponent (TComponent *&requiredComponentStorage, ComponentRequirement requirementType=ComponentRequirement::SOFT) |
| template<typename TComponent > | |
| void | requiresComponent (std::string name, TComponent *&requiredComponentStorage, ComponentRequirement requirementType=ComponentRequirement::SOFT) |
| template<typename TClient > | |
| void | requiresClient (TClient *&requiredClientStorage) |
| template<typename SmaccComponentType , typename TOrthogonal , typename TClient , typename... TArgs> | |
| SmaccComponentType * | createSiblingComponent (TArgs... targs) |
| template<typename SmaccComponentType , typename TOrthogonal , typename TClient , typename... TArgs> | |
| SmaccComponentType * | createSiblingNamedComponent (std::string name, TArgs... targs) |
| rclcpp::Node::SharedPtr | getNode () |
| rclcpp::Logger | getLogger () const |
| ISmaccStateMachine * | getStateMachine () |
| Protected Member Functions inherited from smacc2::ISmaccUpdatable | |
| Protected Attributes inherited from smacc2::ISmaccComponent | |
| ISmaccStateMachine * | stateMachine_ |
| ISmaccClient * | owner_ |
Detailed Description
Component for visualizing trajectories as RViz markers.
This component publishes trajectory paths as visualization markers that can be viewed in RViz. It follows the ISmaccUpdatable pattern for periodic publishing.
Pattern: Publisher + ISmaccUpdatable (similar to nav2z_client's CpWaypointsVisualizer)
Definition at line 44 of file cp_trajectory_visualizer.hpp.
Constructor & Destructor Documentation
◆ CpTrajectoryVisualizer()
|
inline |
Constructor.
- Parameters
-
publishRate Publishing rate (default: 10Hz)
Definition at line 52 of file cp_trajectory_visualizer.hpp.
◆ ~CpTrajectoryVisualizer()
|
virtualdefault |
Member Function Documentation
◆ clearMarkers()
|
inline |
Clear all markers.
Definition at line 176 of file cp_trajectory_visualizer.hpp.
References enabled_, smacc2::ISmaccComponent::getLogger(), markers_, markersMutex_, markersPub_, and markersReady_.
Referenced by cl_moveit2z::CbMoveEndEffectorTrajectory::onExit().


◆ isEnabled()
|
inline |
Check if visualizer is enabled.
Definition at line 226 of file cp_trajectory_visualizer.hpp.
References enabled_.
◆ onInitialize()
|
inlineoverridevirtual |
Initialize the marker publisher.
Reimplemented from smacc2::ISmaccComponent.
Definition at line 59 of file cp_trajectory_visualizer.hpp.
References smacc2::ISmaccComponent::getLogger(), smacc2::ISmaccComponent::getNode(), lastPublishTime_, and markersPub_.

◆ setColor()
|
inline |
Set marker color (RGBA values 0.0-1.0)
Definition at line 201 of file cp_trajectory_visualizer.hpp.
References markerColor_.
◆ setEnabled()
|
inline |
Enable/disable marker publishing.
Definition at line 217 of file cp_trajectory_visualizer.hpp.
References enabled_, and markersMutex_.
◆ setScale()
|
inline |
Set marker scale (sphere diameter in meters)
Definition at line 212 of file cp_trajectory_visualizer.hpp.
References markerScale_.
◆ setTrajectory()
|
inline |
Set trajectory to visualize.
- Parameters
-
poses Vector of poses defining the trajectory path ns Namespace for the markers (default: "trajectory")
Definition at line 99 of file cp_trajectory_visualizer.hpp.
References enabled_, smacc2::ISmaccComponent::getLogger(), markerColor_, markers_, markerScale_, markersMutex_, and markersReady_.
Referenced by cl_moveit2z::CbMoveEndEffectorTrajectory::onEntry().


◆ update()
|
inlineoverridevirtual |
Periodic update - publishes markers if enabled.
Implements smacc2::ISmaccUpdatable.
Definition at line 72 of file cp_trajectory_visualizer.hpp.
References enabled_, smacc2::ISmaccComponent::getNode(), lastPublishTime_, markers_, markersMutex_, markersPub_, markersReady_, and publishRate_.

Member Data Documentation
◆ enabled_
|
private |
Definition at line 234 of file cp_trajectory_visualizer.hpp.
Referenced by clearMarkers(), isEnabled(), setEnabled(), setTrajectory(), and update().
◆ lastPublishTime_
|
private |
Definition at line 242 of file cp_trajectory_visualizer.hpp.
Referenced by onInitialize(), and update().
◆ markerColor_
|
private |
Definition at line 238 of file cp_trajectory_visualizer.hpp.
Referenced by setColor(), and setTrajectory().
◆ markers_
|
private |
Definition at line 230 of file cp_trajectory_visualizer.hpp.
Referenced by clearMarkers(), setTrajectory(), and update().
◆ markerScale_
|
private |
Definition at line 237 of file cp_trajectory_visualizer.hpp.
Referenced by setScale(), and setTrajectory().
◆ markersMutex_
|
private |
Definition at line 231 of file cp_trajectory_visualizer.hpp.
Referenced by clearMarkers(), setEnabled(), setTrajectory(), and update().
◆ markersPub_
|
private |
Definition at line 229 of file cp_trajectory_visualizer.hpp.
Referenced by clearMarkers(), onInitialize(), and update().
◆ markersReady_
|
private |
Definition at line 233 of file cp_trajectory_visualizer.hpp.
Referenced by clearMarkers(), setTrajectory(), and update().
◆ publishRate_
|
private |
Definition at line 241 of file cp_trajectory_visualizer.hpp.
Referenced by update().
The documentation for this class was generated from the following file:
- smacc2_client_library/cl_moveit2z/include/cl_moveit2z/components/cp_trajectory_visualizer.hpp
Generated by