#include <smacc_rviz_display.h>
Public Member Functions | |
| SmaccRvizDisplay () | |
| virtual | ~SmaccRvizDisplay () |
| virtual void | subscribe () |
| virtual void | unsubscribe () |
Protected Member Functions | |
| virtual void | onInitialize () |
| virtual void | reset () |
Private Slots | |
| void | updateCurrentState () |
| void | updateTopic () |
Private Member Functions | |
| void | processMessage (const smacc_msgs::SmaccStatus::ConstPtr &msg) |
Private Attributes | |
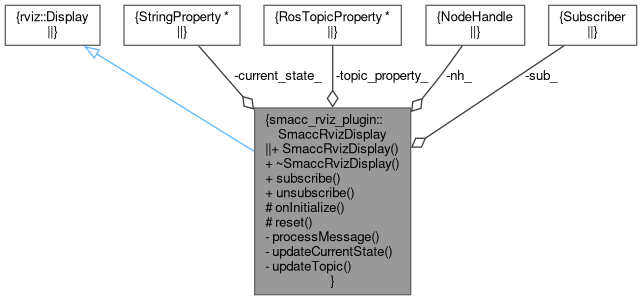
| rviz::StringProperty * | current_state_ |
| rviz::RosTopicProperty * | topic_property_ |
| ros::NodeHandle | nh_ |
| ros::Subscriber | sub_ |
Detailed Description
Definition at line 72 of file smacc_rviz_display.h.
Constructor & Destructor Documentation
◆ SmaccRvizDisplay()
| smacc_rviz_plugin::SmaccRvizDisplay::SmaccRvizDisplay | ( | ) |
Definition at line 51 of file smacc_rviz_display.cpp.
References current_state_, topic_property_, updateCurrentState(), and updateTopic().

◆ ~SmaccRvizDisplay()
|
virtual |
Definition at line 122 of file smacc_rviz_display.cpp.
Member Function Documentation
◆ onInitialize()
|
protectedvirtual |
Definition at line 116 of file smacc_rviz_display.cpp.
References current_state_.
◆ processMessage()
|
private |
Definition at line 139 of file smacc_rviz_display.cpp.
References current_state_.
Referenced by subscribe().

◆ reset()
|
protectedvirtual |
Definition at line 127 of file smacc_rviz_display.cpp.
References current_state_.
Referenced by updateTopic().

◆ subscribe()
|
virtual |
Definition at line 94 of file smacc_rviz_display.cpp.
References current_state_, nh_, processMessage(), sub_, and topic_property_.
Referenced by updateTopic().


◆ unsubscribe()
|
virtual |
Definition at line 100 of file smacc_rviz_display.cpp.
References current_state_, and sub_.
Referenced by updateTopic().

◆ updateCurrentState
|
privateslot |
Definition at line 134 of file smacc_rviz_display.cpp.
Referenced by SmaccRvizDisplay().

◆ updateTopic
|
privateslot |
Definition at line 86 of file smacc_rviz_display.cpp.
References reset(), subscribe(), and unsubscribe().
Referenced by SmaccRvizDisplay().


Member Data Documentation
◆ current_state_
|
private |
Definition at line 116 of file smacc_rviz_display.h.
Referenced by onInitialize(), processMessage(), reset(), SmaccRvizDisplay(), subscribe(), and unsubscribe().
◆ nh_
|
private |
Definition at line 118 of file smacc_rviz_display.h.
Referenced by subscribe().
◆ sub_
|
private |
Definition at line 119 of file smacc_rviz_display.h.
Referenced by subscribe(), and unsubscribe().
◆ topic_property_
|
private |
Definition at line 117 of file smacc_rviz_display.h.
Referenced by SmaccRvizDisplay(), and subscribe().
The documentation for this class was generated from the following files:
- smacc_diagnostics/smacc_rviz_plugin/src/smacc_rviz_display.h
- smacc_diagnostics/smacc_rviz_plugin/src/smacc_rviz_display.cpp