#include <backward_global_planner.h>
Public Member Functions | |
| BackwardGlobalPlanner () | |
| virtual | ~BackwardGlobalPlanner () |
| bool | makePlan (const geometry_msgs::PoseStamped &start, const geometry_msgs::PoseStamped &goal, std::vector< geometry_msgs::PoseStamped > &plan) |
| bool | makePlan (const geometry_msgs::PoseStamped &start, const geometry_msgs::PoseStamped &goal, std::vector< geometry_msgs::PoseStamped > &plan, double &cost) |
| virtual bool | createDefaultBackwardPath (const geometry_msgs::PoseStamped &start, const geometry_msgs::PoseStamped &goal, std::vector< geometry_msgs::PoseStamped > &plan) |
| virtual void | initialize (std::string name, costmap_2d::Costmap2DROS *costmap_ros_) override |
Private Member Functions | |
| void | onForwardTrailMsg (const nav_msgs::Path::ConstPtr &trailMessage) |
| void | publishGoalMarker (const geometry_msgs::Pose &pose, double r, double g, double b) |
Private Attributes | |
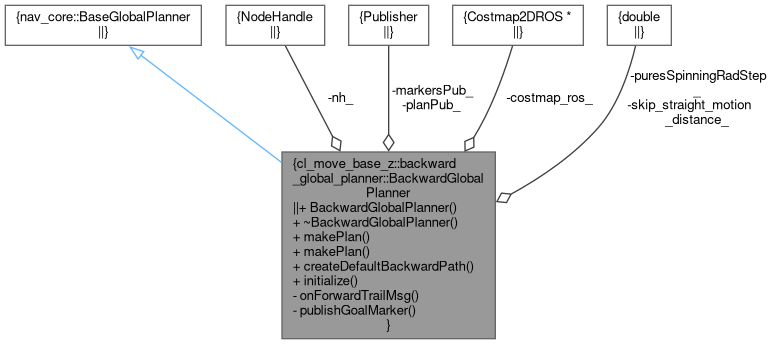
| ros::NodeHandle | nh_ |
| ros::Publisher | planPub_ |
| ros::Publisher | markersPub_ |
| costmap_2d::Costmap2DROS * | costmap_ros_ |
| double | skip_straight_motion_distance_ |
| double | puresSpinningRadStep_ |
Detailed Description
Definition at line 17 of file backward_global_planner.h.
Constructor & Destructor Documentation
◆ BackwardGlobalPlanner()
| cl_move_base_z::backward_global_planner::BackwardGlobalPlanner::BackwardGlobalPlanner | ( | ) |
Constructor()
Definition at line 32 of file backward_global_planner.cpp.
References skip_straight_motion_distance_.
◆ ~BackwardGlobalPlanner()
|
virtual |
Definition at line 37 of file backward_global_planner.cpp.
References planPub_.
Member Function Documentation
◆ createDefaultBackwardPath()
|
virtual |
defaultBackwardPath()
Definition at line 105 of file backward_global_planner.cpp.
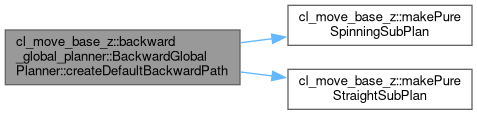
References cl_move_base_z::makePureSpinningSubPlan(), cl_move_base_z::makePureStraightSubPlan(), puresSpinningRadStep_, and skip_straight_motion_distance_.
Referenced by makePlan().

◆ initialize()
|
overridevirtual |
Definition at line 50 of file backward_global_planner.cpp.
References costmap_ros_, markersPub_, and planPub_.
◆ makePlan() [1/2]
| bool cl_move_base_z::backward_global_planner::BackwardGlobalPlanner::makePlan | ( | const geometry_msgs::PoseStamped & | start, |
| const geometry_msgs::PoseStamped & | goal, | ||
| std::vector< geometry_msgs::PoseStamped > & | plan | ||
| ) |
Definition at line 147 of file backward_global_planner.cpp.
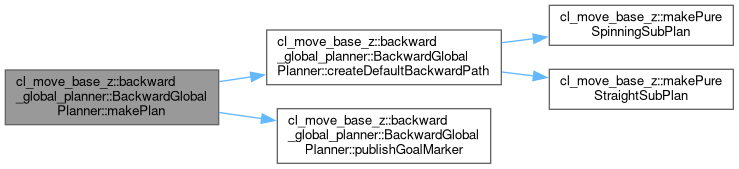
References costmap_ros_, createDefaultBackwardPath(), planPub_, and publishGoalMarker().
Referenced by makePlan().

◆ makePlan() [2/2]
| bool cl_move_base_z::backward_global_planner::BackwardGlobalPlanner::makePlan | ( | const geometry_msgs::PoseStamped & | start, |
| const geometry_msgs::PoseStamped & | goal, | ||
| std::vector< geometry_msgs::PoseStamped > & | plan, | ||
| double & | cost | ||
| ) |
Definition at line 205 of file backward_global_planner.cpp.
References makePlan().

◆ onForwardTrailMsg()
|
private |
◆ publishGoalMarker()
|
private |
Definition at line 66 of file backward_global_planner.cpp.
References costmap_ros_, and markersPub_.
Referenced by makePlan().

Member Data Documentation
◆ costmap_ros_
|
private |
Definition at line 43 of file backward_global_planner.h.
Referenced by initialize(), makePlan(), and publishGoalMarker().
◆ markersPub_
|
private |
Definition at line 41 of file backward_global_planner.h.
Referenced by initialize(), and publishGoalMarker().
◆ nh_
|
private |
Definition at line 37 of file backward_global_planner.h.
◆ planPub_
|
private |
Definition at line 39 of file backward_global_planner.h.
Referenced by initialize(), makePlan(), and ~BackwardGlobalPlanner().
◆ puresSpinningRadStep_
|
private |
Definition at line 51 of file backward_global_planner.h.
Referenced by createDefaultBackwardPath().
◆ skip_straight_motion_distance_
|
private |
Definition at line 49 of file backward_global_planner.h.
Referenced by BackwardGlobalPlanner(), and createDefaultBackwardPath().
The documentation for this class was generated from the following files:
- smacc_client_library/move_base_z_client/custom_planners/backward_global_planner/include/backward_global_planner/backward_global_planner.h
- smacc_client_library/move_base_z_client/custom_planners/backward_global_planner/src/backward_global_planner.cpp