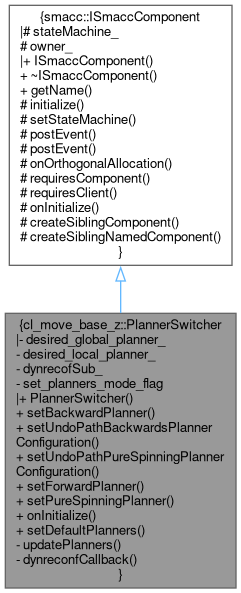
#include <planner_switcher.h>
Public Member Functions | |
| PlannerSwitcher () | |
| void | setBackwardPlanner () |
| void | setUndoPathBackwardsPlannerConfiguration () |
| void | setUndoPathPureSpinningPlannerConfiguration () |
| void | setForwardPlanner () |
| void | setPureSpinningPlanner () |
| virtual void | onInitialize () override |
| void | setDefaultPlanners () |
 Public Member Functions inherited from smacc::ISmaccComponent Public Member Functions inherited from smacc::ISmaccComponent | |
| ISmaccComponent () | |
| virtual | ~ISmaccComponent () |
| virtual std::string | getName () const |
Private Member Functions | |
| void | updatePlanners (bool subscribecallback=true) |
| void | dynreconfCallback (const dynamic_reconfigure::Config::ConstPtr &configuration_update) |
Private Attributes | |
| std::string | desired_global_planner_ |
| std::string | desired_local_planner_ |
| ros::Subscriber | dynrecofSub_ |
| bool | set_planners_mode_flag |
Additional Inherited Members | |
| Protected Member Functions inherited from smacc::ISmaccComponent | |
| virtual void | initialize (ISmaccClient *owner) |
| void | setStateMachine (ISmaccStateMachine *stateMachine) |
| template<typename EventType > | |
| void | postEvent (const EventType &ev) |
| template<typename EventType > | |
| void | postEvent () |
| template<typename TOrthogonal , typename TSourceObject > | |
| void | onOrthogonalAllocation () |
| template<typename TComponent > | |
| void | requiresComponent (TComponent *&requiredComponentStorage) |
| template<typename TClient > | |
| void | requiresClient (TClient *&requiredClientStorage) |
| virtual void | onInitialize () |
| template<typename SmaccComponentType , typename TOrthogonal , typename TClient , typename... TArgs> | |
| SmaccComponentType * | createSiblingComponent (TArgs... targs) |
| template<typename SmaccComponentType , typename TOrthogonal , typename TClient , typename... TArgs> | |
| SmaccComponentType * | createSiblingNamedComponent (std::string name, TArgs... targs) |
| Protected Attributes inherited from smacc::ISmaccComponent | |
| ISmaccStateMachine * | stateMachine_ |
| ISmaccClient * | owner_ |
Detailed Description
Definition at line 19 of file planner_switcher.h.
Constructor & Destructor Documentation
◆ PlannerSwitcher()
| cl_move_base_z::PlannerSwitcher::PlannerSwitcher | ( | ) |
Definition at line 12 of file planner_switcher.cpp.
Member Function Documentation
◆ dynreconfCallback()
|
private |
Definition at line 118 of file planner_switcher.cpp.
References set_planners_mode_flag, and updatePlanners().
Referenced by onInitialize().


◆ onInitialize()
|
overridevirtual |
Reimplemented from smacc::ISmaccComponent.
Definition at line 16 of file planner_switcher.cpp.
References dynrecofSub_, dynreconfCallback(), and smacc::ISmaccComponent::owner_.

◆ setBackwardPlanner()
| void cl_move_base_z::PlannerSwitcher::setBackwardPlanner | ( | ) |
Definition at line 39 of file planner_switcher.cpp.
References desired_global_planner_, desired_local_planner_, and updatePlanners().
Referenced by cl_move_base_z::CbNavigateBackwards::onEntry().


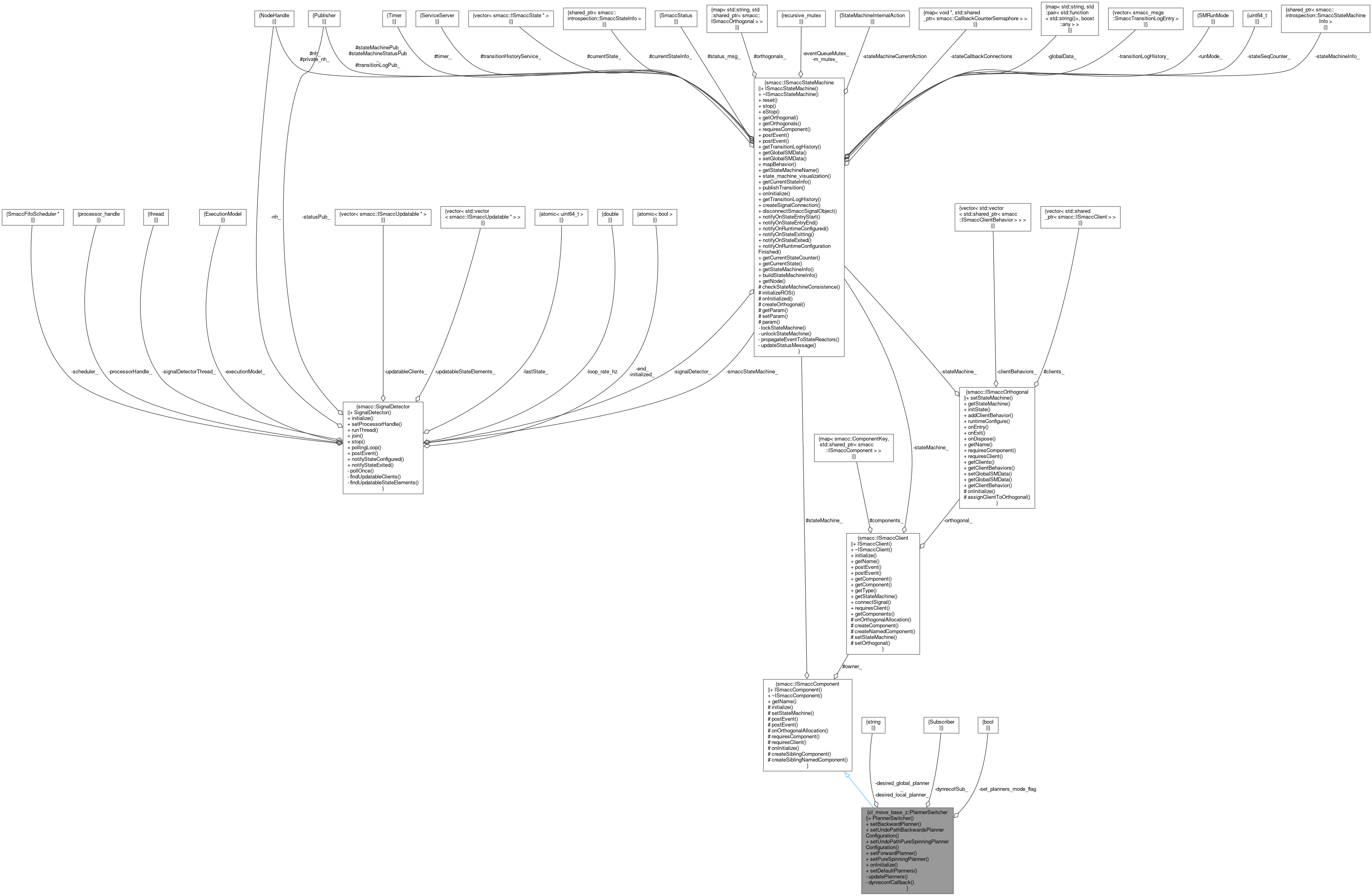
◆ setDefaultPlanners()
| void cl_move_base_z::PlannerSwitcher::setDefaultPlanners | ( | ) |
Definition at line 64 of file planner_switcher.cpp.
References desired_global_planner_, desired_local_planner_, and updatePlanners().
Referenced by cl_move_base_z::CbNavigateGlobalPosition::onEntry(), cl_move_base_z::CbRotate::onEntry(), and cl_move_base_z::WaypointNavigator::sendNextGoal().

◆ setForwardPlanner()
| void cl_move_base_z::PlannerSwitcher::setForwardPlanner | ( | ) |
Definition at line 47 of file planner_switcher.cpp.
References desired_global_planner_, desired_local_planner_, and updatePlanners().
Referenced by cl_move_base_z::CbNavigateForward::onEntry().


◆ setPureSpinningPlanner()
| void cl_move_base_z::PlannerSwitcher::setPureSpinningPlanner | ( | ) |
Definition at line 56 of file planner_switcher.cpp.
References desired_global_planner_, desired_local_planner_, and updatePlanners().
Referenced by cl_move_base_z::CbAbsoluteRotate::onEntry().


◆ setUndoPathBackwardsPlannerConfiguration()
| void cl_move_base_z::PlannerSwitcher::setUndoPathBackwardsPlannerConfiguration | ( | ) |
Definition at line 23 of file planner_switcher.cpp.
References desired_global_planner_, desired_local_planner_, and updatePlanners().

◆ setUndoPathPureSpinningPlannerConfiguration()
| void cl_move_base_z::PlannerSwitcher::setUndoPathPureSpinningPlannerConfiguration | ( | ) |
Definition at line 31 of file planner_switcher.cpp.
References desired_global_planner_, desired_local_planner_, and updatePlanners().

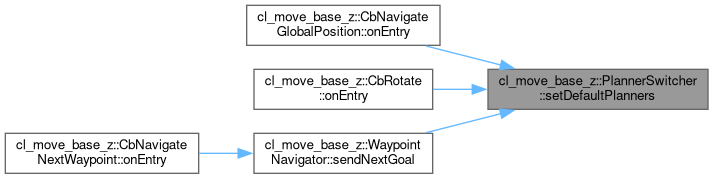
◆ updatePlanners()
|
private |
Definition at line 71 of file planner_switcher.cpp.
References desired_global_planner_, and desired_local_planner_.
Referenced by dynreconfCallback(), setBackwardPlanner(), setDefaultPlanners(), setForwardPlanner(), setPureSpinningPlanner(), setUndoPathBackwardsPlannerConfiguration(), and setUndoPathPureSpinningPlannerConfiguration().
Member Data Documentation
◆ desired_global_planner_
|
private |
Definition at line 36 of file planner_switcher.h.
Referenced by setBackwardPlanner(), setDefaultPlanners(), setForwardPlanner(), setPureSpinningPlanner(), setUndoPathBackwardsPlannerConfiguration(), setUndoPathPureSpinningPlannerConfiguration(), and updatePlanners().
◆ desired_local_planner_
|
private |
Definition at line 37 of file planner_switcher.h.
Referenced by setBackwardPlanner(), setDefaultPlanners(), setForwardPlanner(), setPureSpinningPlanner(), setUndoPathBackwardsPlannerConfiguration(), setUndoPathPureSpinningPlannerConfiguration(), and updatePlanners().
◆ dynrecofSub_
|
private |
Definition at line 38 of file planner_switcher.h.
Referenced by onInitialize().
◆ set_planners_mode_flag
|
private |
Definition at line 39 of file planner_switcher.h.
Referenced by dynreconfCallback().
The documentation for this class was generated from the following files:
- smacc_client_library/move_base_z_client/move_base_z_client_plugin/include/move_base_z_client_plugin/components/planner_switcher/planner_switcher.h
- smacc_client_library/move_base_z_client/move_base_z_client_plugin/src/components/planner_switcher/planner_switcher.cpp