#include <cp_costmap_switch.h>
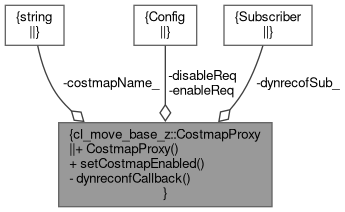
Collaboration diagram for cl_move_base_z::CostmapProxy:
Public Member Functions | |
| CostmapProxy (std::string costmap_name, std::string enablePropertyName) | |
| void | setCostmapEnabled (bool value) |
Private Member Functions | |
| void | dynreconfCallback (const dynamic_reconfigure::Config::ConstPtr &configuration_update) |
Private Attributes | |
| std::string | costmapName_ |
| dynamic_reconfigure::Config | enableReq |
| dynamic_reconfigure::Config | disableReq |
| ros::Subscriber | dynrecofSub_ |
Detailed Description
Definition at line 60 of file cp_costmap_switch.h.
Constructor & Destructor Documentation
◆ CostmapProxy()
| cl_move_base_z::CostmapProxy::CostmapProxy | ( | std::string | costmap_name, |
| std::string | enablePropertyName | ||
| ) |
Definition at line 99 of file cp_costmap_switch.cpp.
100{
102 dynamic_reconfigure::BoolParameter enableField;
103 enableField.name = "enabled";
104 enableField.value = true;
105
106 enableReq.bools.push_back(enableField);
107
108 enableField.value = false;
109 disableReq.bools.push_back(enableField);
110}
dynamic_reconfigure::Config disableReq
Definition: cp_costmap_switch.h:70
std::string costmapName_
Definition: cp_costmap_switch.h:68
dynamic_reconfigure::Config enableReq
Definition: cp_costmap_switch.h:69
References costmapName_, disableReq, and enableReq.
Member Function Documentation
◆ dynreconfCallback()
|
private |
Definition at line 133 of file cp_costmap_switch.cpp.
134{
135 // auto gp = std::find_if(configuration_update->strs.begin(), configuration_update->strs.begin(),
136 // [&](const dynamic_reconfigure::StrParameter &p) { return p.name == "base_global_planner" && p.value == desired_global_planner_; });
137}
◆ setCostmapEnabled()
| void cl_move_base_z::CostmapProxy::setCostmapEnabled | ( | bool | value | ) |
Definition at line 112 of file cp_costmap_switch.cpp.
113{
114 dynamic_reconfigure::ReconfigureRequest srv_req;
115 dynamic_reconfigure::ReconfigureResponse srv_resp;
116
117 if (value)
118 srv_req.config = enableReq;
119 else
120 srv_req.config = disableReq;
121
123 {
125 ros::service::call(costmapName_, srv_req, srv_resp);
126 }
127 else
128 {
129 ROS_WARN("could not call dynamic reconfigure server. It does not exist: %s", costmapName_.c_str());
130 }
131}
References costmapName_, disableReq, and enableReq.
Member Data Documentation
◆ costmapName_
|
private |
Definition at line 68 of file cp_costmap_switch.h.
Referenced by CostmapProxy(), and setCostmapEnabled().
◆ disableReq
|
private |
Definition at line 70 of file cp_costmap_switch.h.
Referenced by CostmapProxy(), and setCostmapEnabled().
◆ dynrecofSub_
|
private |
Definition at line 74 of file cp_costmap_switch.h.
◆ enableReq
|
private |
Definition at line 69 of file cp_costmap_switch.h.
Referenced by CostmapProxy(), and setCostmapEnabled().
The documentation for this class was generated from the following files:
- smacc_client_library/move_base_z_client/move_base_z_client_plugin/include/move_base_z_client_plugin/components/costmap_switch/cp_costmap_switch.h
- smacc_client_library/move_base_z_client/move_base_z_client_plugin/src/components/costmap_switch/cp_costmap_switch.cpp