Public Member Functions | |
| template<typename T > | |
| std::shared_ptr< TestPolicy > | tryTestPolicyFactory (std::string matchname, XmlRpc::XmlRpcValue &initXmlRpcValue) |
| void | init () |
| void | success (std::string msg) |
| void | failure (std::string msg) |
| void | update () |
| void | onRosOutCallback (const rosgraph_msgs::Log &msg) |
| void | onSmaccTransitionCallback (const smacc_msgs::SmaccTransitionLogEntry &msg) |
Public Attributes | |
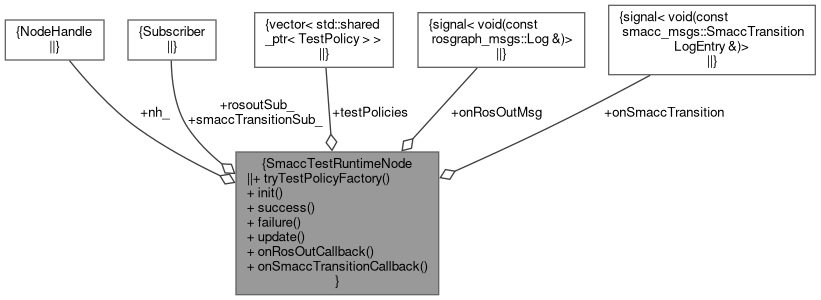
| ros::NodeHandle | nh_ |
| ros::Subscriber | rosoutSub_ |
| ros::Subscriber | smaccTransitionSub_ |
| std::vector< std::shared_ptr< TestPolicy > > | testPolicies |
| boost::signals2::signal< void(const rosgraph_msgs::Log &)> | onRosOutMsg |
| boost::signals2::signal< void(const smacc_msgs::SmaccTransitionLogEntry &)> | onSmaccTransition |
Detailed Description
Definition at line 28 of file smacc_runtime_test_node.cpp.
Member Function Documentation
◆ failure()
|
inline |
Definition at line 105 of file smacc_runtime_test_node.cpp.
Referenced by TimeoutFailureTestPolicy::update().

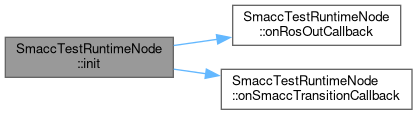
◆ init()
|
inline |
Definition at line 61 of file smacc_runtime_test_node.cpp.
References nh_, onRosOutCallback(), onSmaccTransitionCallback(), rosoutSub_, and smaccTransitionSub_.
Referenced by main().

◆ onRosOutCallback()
|
inline |
Definition at line 119 of file smacc_runtime_test_node.cpp.
References onRosOutMsg.
Referenced by init().

◆ onSmaccTransitionCallback()
|
inline |
Definition at line 124 of file smacc_runtime_test_node.cpp.
References onSmaccTransition.
Referenced by init().

◆ success()
|
inline |
Definition at line 99 of file smacc_runtime_test_node.cpp.
Referenced by ReachedStateSuccessTestPolicy::init().

◆ tryTestPolicyFactory()
|
inline |
Definition at line 41 of file smacc_runtime_test_node.cpp.
References testPolicies.
◆ update()
|
inline |
Definition at line 111 of file smacc_runtime_test_node.cpp.
References testPolicies.
Referenced by main().

Member Data Documentation
◆ nh_
| ros::NodeHandle SmaccTestRuntimeNode::nh_ |
Definition at line 31 of file smacc_runtime_test_node.cpp.
Referenced by init().
◆ onRosOutMsg
| boost::signals2::signal<void(const rosgraph_msgs::Log&)> SmaccTestRuntimeNode::onRosOutMsg |
Definition at line 37 of file smacc_runtime_test_node.cpp.
Referenced by onRosOutCallback().
◆ onSmaccTransition
| boost::signals2::signal<void(const smacc_msgs::SmaccTransitionLogEntry&)> SmaccTestRuntimeNode::onSmaccTransition |
Definition at line 38 of file smacc_runtime_test_node.cpp.
Referenced by ReachedStateSuccessTestPolicy::init(), and onSmaccTransitionCallback().
◆ rosoutSub_
| ros::Subscriber SmaccTestRuntimeNode::rosoutSub_ |
Definition at line 32 of file smacc_runtime_test_node.cpp.
Referenced by init().
◆ smaccTransitionSub_
| ros::Subscriber SmaccTestRuntimeNode::smaccTransitionSub_ |
Definition at line 33 of file smacc_runtime_test_node.cpp.
Referenced by init().
◆ testPolicies
| std::vector<std::shared_ptr<TestPolicy> > SmaccTestRuntimeNode::testPolicies |
Definition at line 36 of file smacc_runtime_test_node.cpp.
Referenced by tryTestPolicyFactory(), and update().
The documentation for this class was generated from the following file:
- smacc_diagnostics/smacc_runtime_test/src/smacc_runtime_test_node.cpp