#include <sti_radial_end_point.hpp>
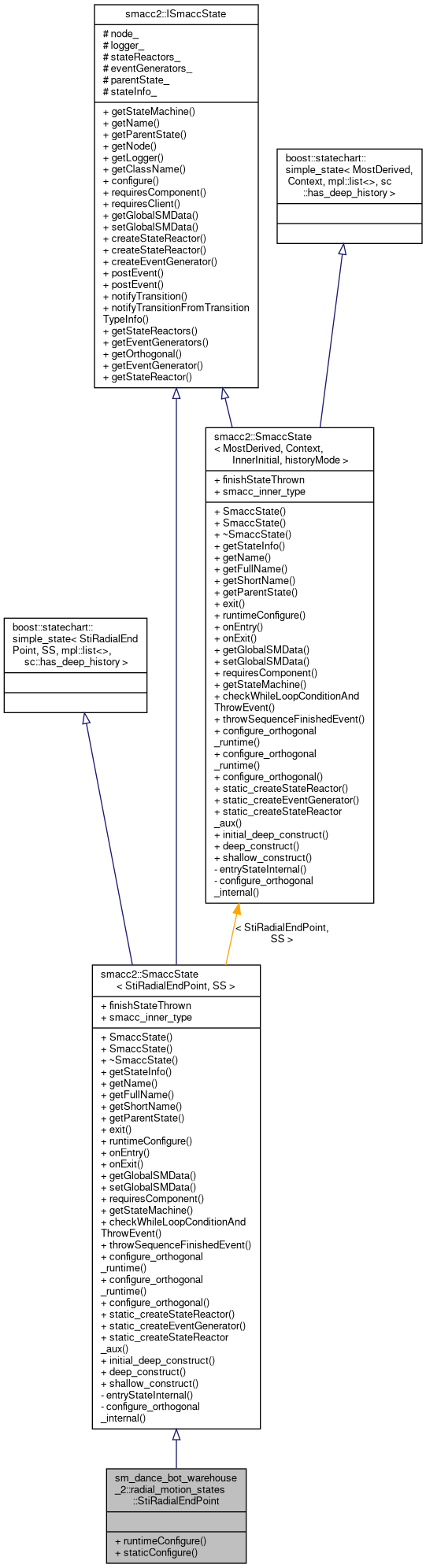
Inheritance diagram for sm_dance_bot_warehouse_2::radial_motion_states::StiRadialEndPoint:
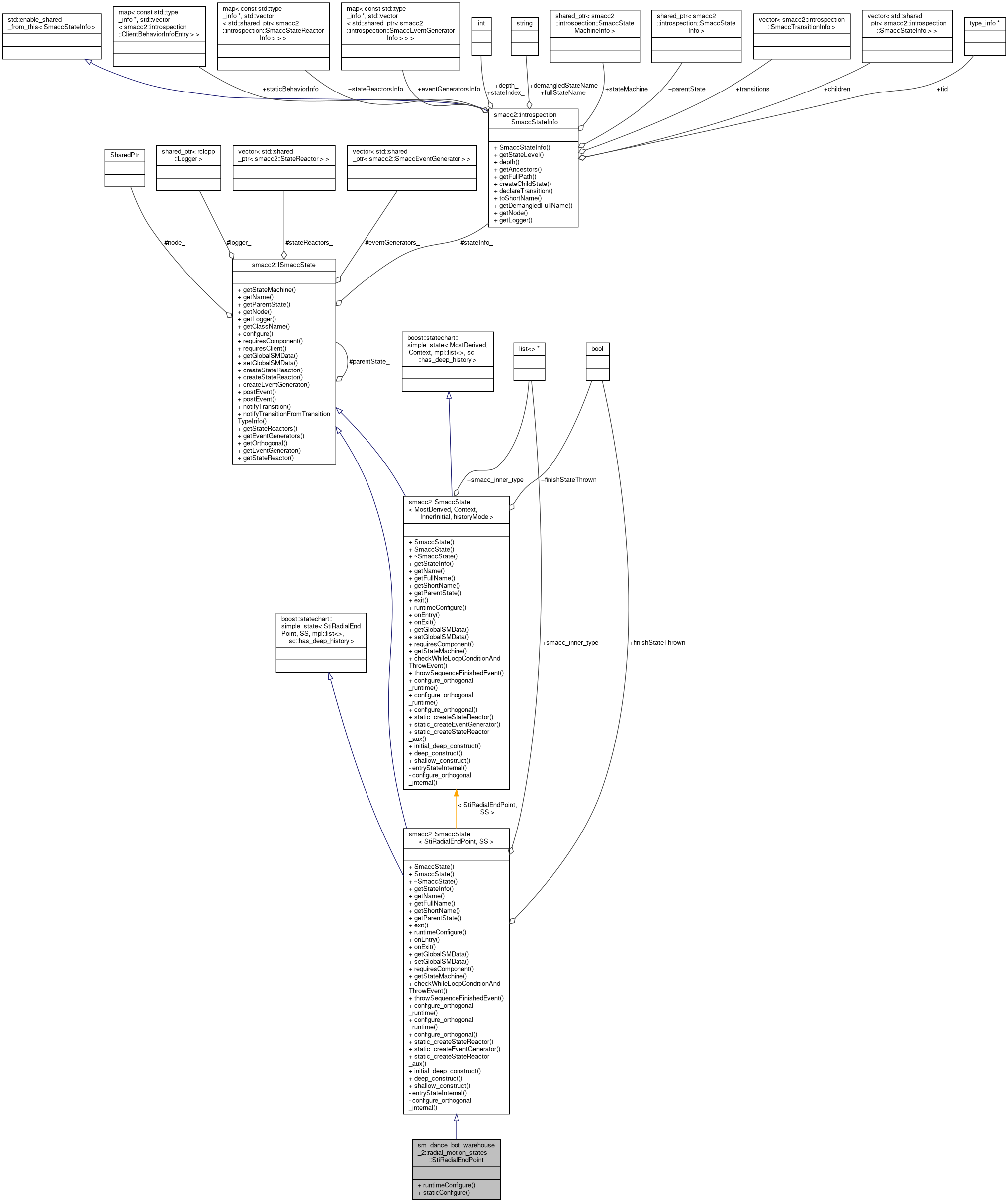
Collaboration diagram for sm_dance_bot_warehouse_2::radial_motion_states::StiRadialEndPoint:
Public Types | |
| typedef mpl::list< Transition< EvCbSuccess< CbNavigateForward, OrNavigation >, StiRadialReturn, SUCCESS >, Transition< EvCbFailure< CbNavigateForward, OrNavigation >, StiRadialReturn, ABORT > > | reactions |
 Public Types inherited from smacc2::SmaccState< StiRadialEndPoint, SS > Public Types inherited from smacc2::SmaccState< StiRadialEndPoint, SS > | |
| typedef SS | TContext |
| typedef Context::inner_context_type | context_type |
| typedef context_type::state_iterator | state_iterator |
| typedef mpl::list<> | LastDeepState |
| typedef base_type::outermost_context_base_type | outermost_context_base_type |
| typedef base_type::inner_context_ptr_type | inner_context_ptr_type |
| typedef base_type::context_ptr_type | context_ptr_type |
| typedef base_type::inner_initial_list | inner_initial_list |
Public Member Functions | |
| void | runtimeConfigure () |
| Public Member Functions inherited from smacc2::SmaccState< StiRadialEndPoint, SS > | |
| SmaccState ()=delete | |
| SmaccState (my_context ctx) | |
| virtual | ~SmaccState () |
| const smacc2::introspection::SmaccStateInfo * | getStateInfo () |
| std::string | getName () override |
| std::string | getFullName () |
| std::string | getShortName () |
| virtual ISmaccState * | getParentState () |
| void | exit () |
| void | runtimeConfigure () |
| void | onEntry () |
| void | onExit () |
| bool | getGlobalSMData (std::string name, T &ret) |
| void | setGlobalSMData (std::string name, T value) |
| void | requiresComponent (SmaccComponentType *&storage) |
| virtual ISmaccStateMachine & | getStateMachine () |
| void | checkWhileLoopConditionAndThrowEvent (bool(MostDerived::*conditionFn)()) |
| void | throwSequenceFinishedEvent () |
| Public Member Functions inherited from smacc2::ISmaccState | |
| virtual ISmaccStateMachine & | getStateMachine ()=0 |
| virtual std::string | getName ()=0 |
| ISmaccState * | getParentState () |
| rclcpp::Node::SharedPtr & | getNode () |
| rclcpp::Logger | getLogger () |
| virtual std::string | getClassName () |
| template<typename TOrthogonal , typename TBehavior , typename... Args> | |
| std::shared_ptr< TBehavior > | configure (Args &&... args) |
| template<typename SmaccComponentType > | |
| void | requiresComponent (SmaccComponentType *&storage) |
| template<typename SmaccClientType > | |
| void | requiresClient (SmaccClientType *&storage) |
| template<typename T > | |
| bool | getGlobalSMData (std::string name, T &ret) |
| template<typename T > | |
| void | setGlobalSMData (std::string name, T value) |
| template<typename TStateReactor , typename TTriggerEvent , typename TEventList , typename... TEvArgs> | |
| std::shared_ptr< TStateReactor > | createStateReactor (TEvArgs... args) |
| template<typename TStateReactor , typename... TEvArgs> | |
| std::shared_ptr< TStateReactor > | createStateReactor (TEvArgs... args) |
| template<typename TEventGenerator , typename... TEvArgs> | |
| std::shared_ptr< TEventGenerator > | createEventGenerator (TEvArgs... args) |
| template<typename EventType > | |
| void | postEvent (const EventType &ev) |
| template<typename EventType > | |
| void | postEvent () |
| template<typename TransitionType > | |
| void | notifyTransition () |
| void | notifyTransitionFromTransitionTypeInfo (std::shared_ptr< smacc2::introspection::TypeInfo > &transitionTypeInfo) |
| std::vector< std::shared_ptr< StateReactor > > & | getStateReactors () |
| std::vector< std::shared_ptr< SmaccEventGenerator > > & | getEventGenerators () |
| template<typename TOrthogonal > | |
| TOrthogonal * | getOrthogonal () |
| template<typename TEventGenerator > | |
| TEventGenerator * | getEventGenerator () |
| template<typename TStateReactor > | |
| TStateReactor * | getStateReactor () |
Static Public Member Functions | |
| static void | staticConfigure () |
| Static Public Member Functions inherited from smacc2::SmaccState< StiRadialEndPoint, SS > | |
| static void | configure_orthogonal_runtime (std::function< void(TBehavior &bh, StiRadialEndPoint &)> initializationFunction) |
| static void | configure_orthogonal_runtime (std::function< void(TBehavior &bh)> initializationFunction) |
| static void | configure_orthogonal (Args &&... args) |
| static std::shared_ptr< smacc2::introspection::StateReactorHandler > | static_createStateReactor (TArgs... args) |
| static std::shared_ptr< smacc2::introspection::EventGeneratorHandler > | static_createEventGenerator (TUArgs... args) |
| static std::shared_ptr< smacc2::introspection::StateReactorHandler > | static_createStateReactor_aux (TUArgs... args) |
| static void | initial_deep_construct (outermost_context_base_type &outermostContextBase) |
| static void | deep_construct (const context_ptr_type &pContext, outermost_context_base_type &outermostContextBase) |
| static inner_context_ptr_type | shallow_construct (const context_ptr_type &pContext, outermost_context_base_type &outermostContextBase) |
Additional Inherited Members | |
| Public Attributes inherited from smacc2::SmaccState< StiRadialEndPoint, SS > | |
| bool | finishStateThrown |
| mpl::list<> * | smacc_inner_type |
| Protected Attributes inherited from smacc2::ISmaccState | |
| rclcpp::Node::SharedPtr | node_ |
| std::shared_ptr< rclcpp::Logger > | logger_ |
| std::vector< std::shared_ptr< StateReactor > > | stateReactors_ |
| std::vector< std::shared_ptr< smacc2::SmaccEventGenerator > > | eventGenerators_ |
| ISmaccState * | parentState_ |
| const smacc2::introspection::SmaccStateInfo * | stateInfo_ |
Detailed Description
Definition at line 26 of file sti_radial_end_point.hpp.
Member Typedef Documentation
◆ reactions
| typedef mpl::list< Transition<EvCbSuccess<CbNavigateForward, OrNavigation>, StiRadialReturn, SUCCESS>, Transition<EvCbFailure<CbNavigateForward, OrNavigation>, StiRadialReturn, ABORT> > sm_dance_bot_warehouse_2::radial_motion_states::StiRadialEndPoint::reactions |
Definition at line 36 of file sti_radial_end_point.hpp.
Member Function Documentation
◆ runtimeConfigure()
|
inline |
Definition at line 47 of file sti_radial_end_point.hpp.
48 {
49 // float EXTRA_SECURE_DISTANCE = 0.5;
50
51 ClNav2Z* navzclient;
52 this->requiresClient(navzclient);
53
54 //auto lidarData = lidarClient->getComponent<CpForwardObstacleDetector>();
55 auto forwardDistanceComputation = navzclient->getComponent<CpSquareShapeBoundary>();
56
57 auto forwardBehavior =
58 this->getOrthogonal<OrNavigation>()->getClientBehavior<CbNavigateForward>();
59
60 //forwardBehavior->setForwardDistance(std::min(forwardDistanceComputation->getForwardDistance() + EXTRA_SECURE_DISTANCE, 6.0f)); // at most 15 meters
61 forwardBehavior->setForwardDistance(forwardDistanceComputation->getForwardDistance() ); // at most 15 meters
62 }
void requiresClient(SmaccClientType *&storage)
Definition: smacc_state_impl.hpp:70
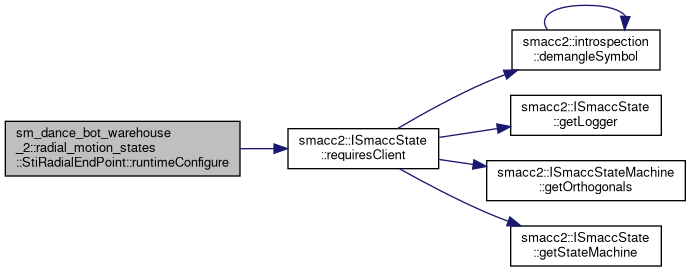
References smacc2::ISmaccState::requiresClient().
Here is the call graph for this function:
◆ staticConfigure()
|
inlinestatic |
Definition at line 39 of file sti_radial_end_point.hpp.
40 {
41 //RCLCPP_INFO(getLogger(),"ssr radial end point, distance in meters: %lf", SS::ray_length_meters());
42 configure_orthogonal<OrNavigation, CbNavigateForward>(SS::ray_length_meters());
43 configure_orthogonal<OrNavigation, CbPauseSlam>();
44 configure_orthogonal<OrLED, CbLEDOn>();
45 }
The documentation for this struct was generated from the following file:
- smacc2_sm_reference_library/sm_dance_bot_warehouse_2/include/sm_dance_bot_warehouse_2/states/radial_motion_states/sti_radial_end_point.hpp