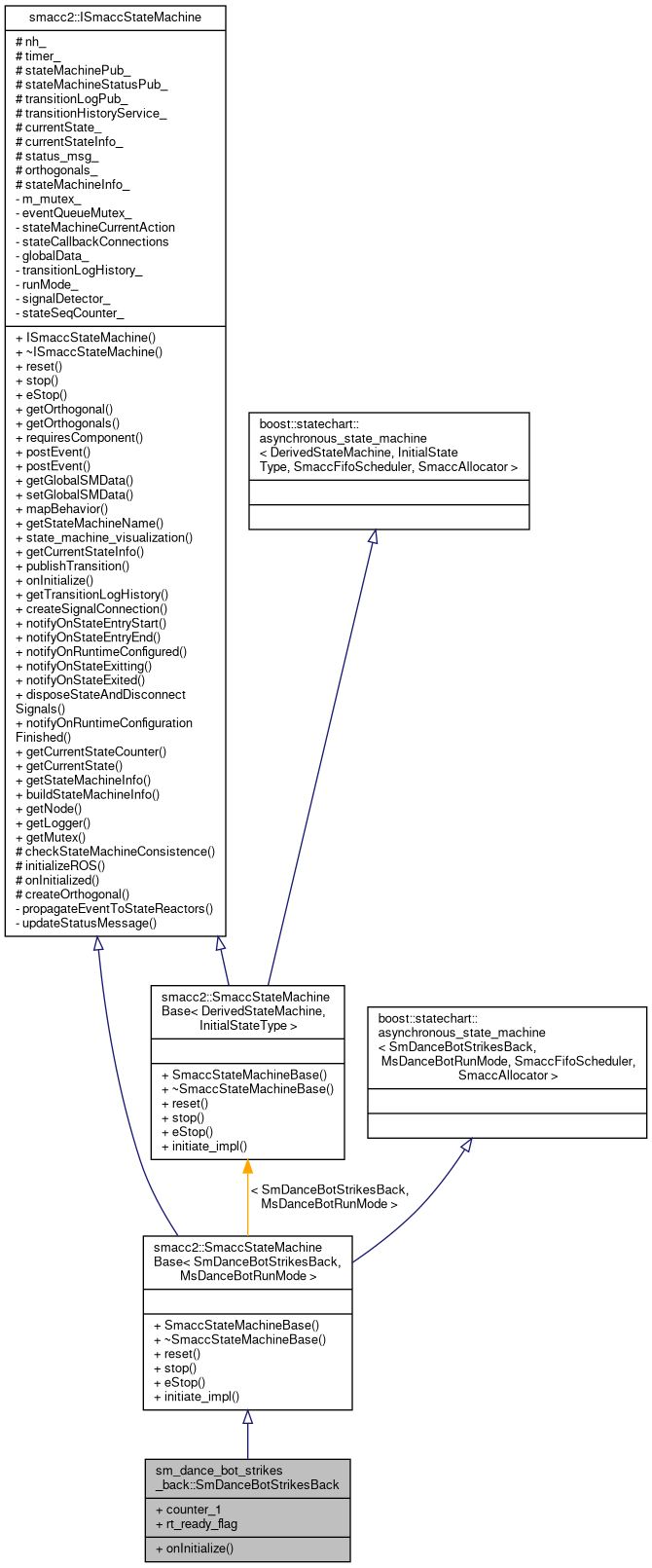
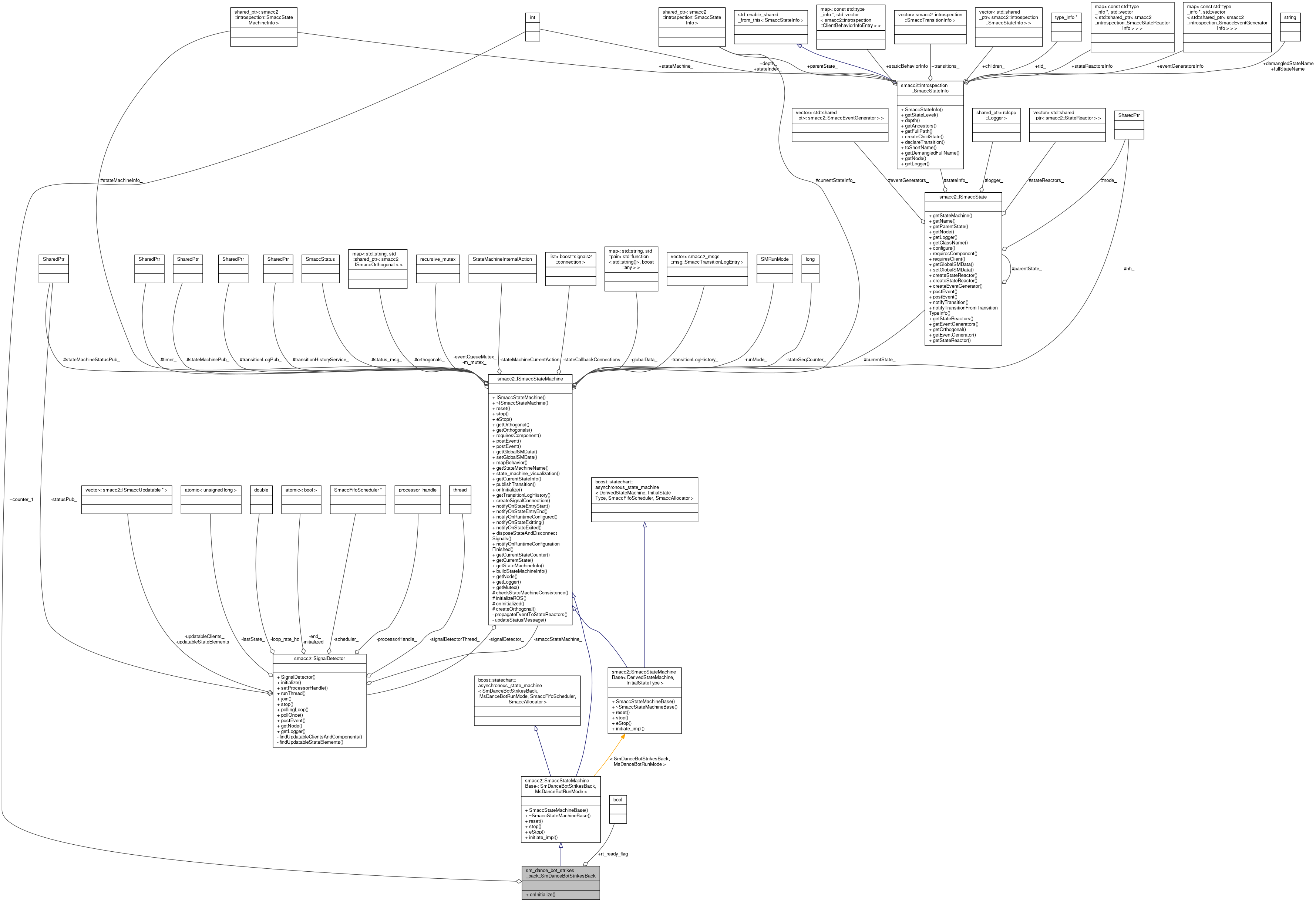
Advanced example of state machine with smacc that shows multiple techniques for the development of state machines. More...
#include <sm_dance_bot_strikes_back.hpp>
Public Types | |
| typedef mpl::bool_< false > | shallow_history |
| typedef mpl::bool_< false > | deep_history |
| typedef mpl::bool_< false > | inherited_deep_history |
Public Member Functions | |
| void | onInitialize () override |
| this function should be implemented by the user to create the orthogonals More... | |
 Public Member Functions inherited from smacc2::SmaccStateMachineBase< SmDanceBotStrikesBack, MsDanceBotRunMode > Public Member Functions inherited from smacc2::SmaccStateMachineBase< SmDanceBotStrikesBack, MsDanceBotRunMode > | |
| SmaccStateMachineBase (my_context ctx, SignalDetector *signalDetector) | |
| virtual | ~SmaccStateMachineBase () |
| void | reset () override |
| void | stop () override |
| void | eStop () override |
| void | initiate_impl () override |
| Public Member Functions inherited from smacc2::ISmaccStateMachine | |
| ISmaccStateMachine (std::string stateMachineName, SignalDetector *signalDetector) | |
| virtual | ~ISmaccStateMachine () |
| virtual void | reset () |
| virtual void | stop () |
| virtual void | eStop () |
| template<typename TOrthogonal > | |
| TOrthogonal * | getOrthogonal () |
| const std::map< std::string, std::shared_ptr< smacc2::ISmaccOrthogonal > > & | getOrthogonals () const |
| template<typename SmaccComponentType > | |
| void | requiresComponent (SmaccComponentType *&storage) |
| template<typename EventType > | |
| void | postEvent (EventType *ev, EventLifeTime evlifetime=EventLifeTime::ABSOLUTE) |
| template<typename EventType > | |
| void | postEvent (EventLifeTime evlifetime=EventLifeTime::ABSOLUTE) |
| template<typename T > | |
| bool | getGlobalSMData (std::string name, T &ret) |
| template<typename T > | |
| void | setGlobalSMData (std::string name, T value) |
| template<typename StateField , typename BehaviorType > | |
| void | mapBehavior () |
| std::string | getStateMachineName () |
| void | state_machine_visualization () |
| std::shared_ptr< SmaccStateInfo > | getCurrentStateInfo () |
| void | publishTransition (const SmaccTransitionInfo &transitionInfo) |
| virtual void | onInitialize () |
| this function should be implemented by the user to create the orthogonals More... | |
| void | getTransitionLogHistory (const std::shared_ptr< rmw_request_id_t > request_header, const std::shared_ptr< smacc2_msgs::srv::SmaccGetTransitionHistory::Request > req, std::shared_ptr< smacc2_msgs::srv::SmaccGetTransitionHistory::Response > res) |
| template<typename TSmaccSignal , typename TMemberFunctionPrototype , typename TSmaccObjectType > | |
| boost::signals2::connection | createSignalConnection (TSmaccSignal &signal, TMemberFunctionPrototype callback, TSmaccObjectType *object) |
| template<typename StateType > | |
| void | notifyOnStateEntryStart (StateType *state) |
| template<typename StateType > | |
| void | notifyOnStateEntryEnd (StateType *state) |
| template<typename StateType > | |
| void | notifyOnRuntimeConfigured (StateType *state) |
| template<typename StateType > | |
| void | notifyOnStateExitting (StateType *state) |
| template<typename StateType > | |
| void | notifyOnStateExited (StateType *state) |
| void | disposeStateAndDisconnectSignals () |
| template<typename StateType > | |
| void | notifyOnRuntimeConfigurationFinished (StateType *state) |
| unsigned long | getCurrentStateCounter () const |
| ISmaccState * | getCurrentState () const |
| const SmaccStateMachineInfo & | getStateMachineInfo () |
| template<typename InitialStateType > | |
| void | buildStateMachineInfo () |
| rclcpp::Node::SharedPtr | getNode () |
| rclcpp::Logger | getLogger () |
| std::recursive_mutex & | getMutex () |
Public Attributes | |
| int | counter_1 |
| bool | rt_ready_flag |
Additional Inherited Members | |
| Protected Member Functions inherited from smacc2::ISmaccStateMachine | |
| void | checkStateMachineConsistence () |
| void | initializeROS (std::string smshortname) |
| void | onInitialized () |
| template<typename TOrthogonal > | |
| void | createOrthogonal () |
| Protected Attributes inherited from smacc2::ISmaccStateMachine | |
| rclcpp::Node::SharedPtr | nh_ |
| rclcpp::TimerBase::SharedPtr | timer_ |
| rclcpp::Publisher< smacc2_msgs::msg::SmaccStateMachine >::SharedPtr | stateMachinePub_ |
| rclcpp::Publisher< smacc2_msgs::msg::SmaccStatus >::SharedPtr | stateMachineStatusPub_ |
| rclcpp::Publisher< smacc2_msgs::msg::SmaccTransitionLogEntry >::SharedPtr | transitionLogPub_ |
| rclcpp::Service< smacc2_msgs::srv::SmaccGetTransitionHistory >::SharedPtr | transitionHistoryService_ |
| ISmaccState * | currentState_ |
| std::shared_ptr< SmaccStateInfo > | currentStateInfo_ |
| smacc2_msgs::msg::SmaccStatus | status_msg_ |
| std::map< std::string, std::shared_ptr< smacc2::ISmaccOrthogonal > > | orthogonals_ |
| std::shared_ptr< SmaccStateMachineInfo > | stateMachineInfo_ |
Detailed Description
Advanced example of state machine with smacc that shows multiple techniques for the development of state machines.
Definition at line 141 of file sm_dance_bot_strikes_back.hpp.
Member Typedef Documentation
◆ deep_history
| typedef mpl::bool_<false> sm_dance_bot_strikes_back::SmDanceBotStrikesBack::deep_history |
Definition at line 148 of file sm_dance_bot_strikes_back.hpp.
◆ inherited_deep_history
| typedef mpl::bool_<false> sm_dance_bot_strikes_back::SmDanceBotStrikesBack::inherited_deep_history |
Definition at line 149 of file sm_dance_bot_strikes_back.hpp.
◆ shallow_history
| typedef mpl::bool_<false> sm_dance_bot_strikes_back::SmDanceBotStrikesBack::shallow_history |
Definition at line 147 of file sm_dance_bot_strikes_back.hpp.
Member Function Documentation
◆ onInitialize()
|
inlineoverridevirtual |
this function should be implemented by the user to create the orthogonals
Reimplemented from smacc2::ISmaccStateMachine.
Definition at line 153 of file sm_dance_bot_strikes_back.hpp.
References smacc2::ISmaccStateMachine::setGlobalSMData().

Member Data Documentation
◆ counter_1
| int sm_dance_bot_strikes_back::SmDanceBotStrikesBack::counter_1 |
Definition at line 144 of file sm_dance_bot_strikes_back.hpp.
◆ rt_ready_flag
| bool sm_dance_bot_strikes_back::SmDanceBotStrikesBack::rt_ready_flag |
Definition at line 145 of file sm_dance_bot_strikes_back.hpp.
The documentation for this struct was generated from the following file:
- smacc2_sm_reference_library/sm_dance_bot_strikes_back/include/sm_dance_bot_strikes_back/sm_dance_bot_strikes_back.hpp