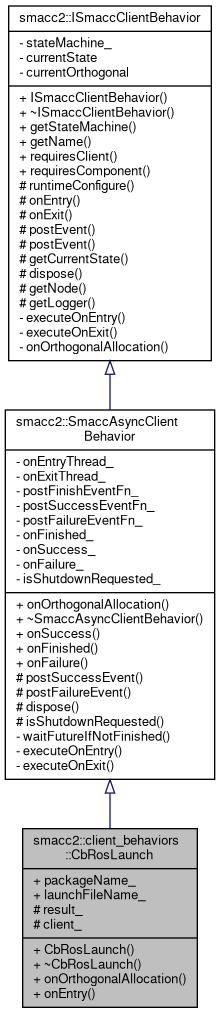
#include <cb_ros_launch.hpp>
Definition at line 29 of file cb_ros_launch.hpp.
◆ CbRosLaunch()
| smacc2::client_behaviors::CbRosLaunch::CbRosLaunch |
( |
| ) |
|
◆ ~CbRosLaunch()
| smacc2::client_behaviors::CbRosLaunch::~CbRosLaunch |
( |
| ) |
|
|
virtual |
◆ onEntry()
| void smacc2::client_behaviors::CbRosLaunch::onEntry |
( |
| ) |
|
|
overridevirtual |
Reimplemented from smacc2::ISmaccClientBehavior.
Definition at line 41 of file cb_ros_launch.cpp.
42{
43 RCLCPP_INFO_STREAM(
getLogger(),
"[CbRosLaunch] OnEntry");
44
45 std::string packageName, launchFileName;
47 {
48 RCLCPP_INFO_STREAM(
52 }
53 else
54 {
55 RCLCPP_INFO_STREAM(
getLogger(),
"[CbRosLaunch] finding Ros Launch client");
56
59 {
60 RCLCPP_INFO_STREAM(
63
65 }
66 else
67 {
68 RCLCPP_ERROR(
70 "[CbRosLaunch] Inccorrect ros launch operation. No Ros Launch client specified neither "
71 "package/roslaunch file path.");
72 }
73 }
74}
virtual rclcpp::Logger getLogger()
void requiresClient(SmaccClientType *&storage)
std::string launchFileName_
static std::future< std::string > executeRosLaunch(std::string packageName, std::string launchFilename, std::function< bool()> cancelCondition)
std::optional< std::string > launchFileName_
smacc2::client_bases::ClRosLaunch * client_
std::optional< std::string > packageName_
References client_, smacc2::client_bases::ClRosLaunch::executeRosLaunch(), smacc2::ISmaccClientBehavior::getLogger(), smacc2::client_bases::ClRosLaunch::launch(), smacc2::client_bases::ClRosLaunch::launchFileName_, launchFileName_, smacc2::client_bases::ClRosLaunch::packageName_, packageName_, and smacc2::ISmaccClientBehavior::requiresClient().
◆ onOrthogonalAllocation()
template<typename TOrthogonal , typename TSourceObject >
| void smacc2::client_behaviors::CbRosLaunch::onOrthogonalAllocation |
( |
| ) |
|
|
inline |
Definition at line 39 of file cb_ros_launch.hpp.
40 {
41 smacc2::SmaccAsyncClientBehavior::onOrthogonalAllocation<TOrthogonal, TSourceObject>();
42 }
◆ client_
◆ launchFileName_
| std::optional<std::string> smacc2::client_behaviors::CbRosLaunch::launchFileName_ |
◆ packageName_
| std::optional<std::string> smacc2::client_behaviors::CbRosLaunch::packageName_ |
◆ result_
| std::string smacc2::client_behaviors::CbRosLaunch::result_ |
|
protected |
The documentation for this class was generated from the following files:
 Public Member Functions inherited from smacc2::SmaccAsyncClientBehavior
Public Member Functions inherited from smacc2::SmaccAsyncClientBehavior