#include <or_obstacle_perception.hpp>
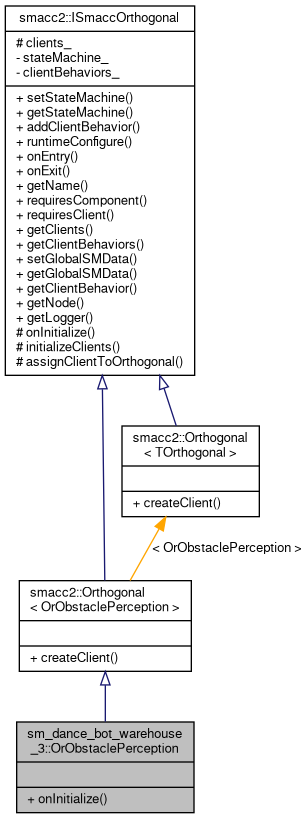
Inheritance diagram for sm_dance_bot_warehouse_3::OrObstaclePerception:
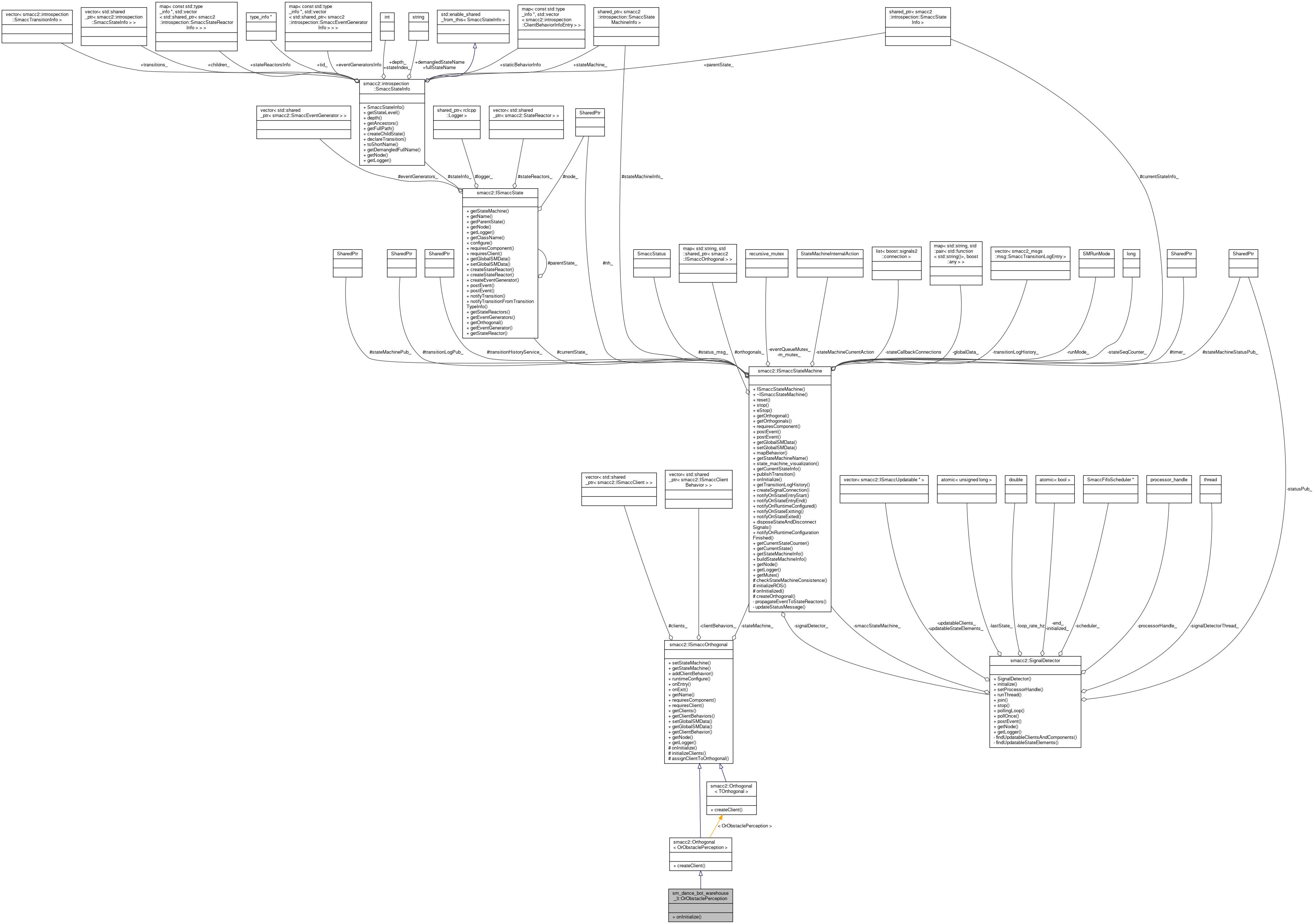
Collaboration diagram for sm_dance_bot_warehouse_3::OrObstaclePerception:
Public Member Functions | |
| void | onInitialize () override |
 Public Member Functions inherited from smacc2::Orthogonal< OrObstaclePerception > Public Member Functions inherited from smacc2::Orthogonal< OrObstaclePerception > | |
| std::shared_ptr< ClientHandler< OrObstaclePerception, TClient > > | createClient (TArgs... args) |
| Public Member Functions inherited from smacc2::ISmaccOrthogonal | |
| void | setStateMachine (ISmaccStateMachine *value) |
| ISmaccStateMachine * | getStateMachine () |
| void | addClientBehavior (std::shared_ptr< smacc2::ISmaccClientBehavior > clientBehavior) |
| void | runtimeConfigure () |
| void | onEntry () |
| void | onExit () |
| virtual std::string | getName () const |
| template<typename SmaccComponentType > | |
| void | requiresComponent (SmaccComponentType *&storage) |
| template<typename SmaccClientType > | |
| bool | requiresClient (SmaccClientType *&storage) |
| const std::vector< std::shared_ptr< smacc2::ISmaccClient > > & | getClients () |
| const std::vector< std::shared_ptr< smacc2::ISmaccClientBehavior > > & | getClientBehaviors () const |
| template<typename T > | |
| void | setGlobalSMData (std::string name, T value) |
| template<typename T > | |
| bool | getGlobalSMData (std::string name, T &ret) |
| template<typename TClientBehavior > | |
| TClientBehavior * | getClientBehavior () |
| rclcpp::Node::SharedPtr | getNode () |
| rclcpp::Logger | getLogger () |
Additional Inherited Members | |
| Protected Member Functions inherited from smacc2::ISmaccOrthogonal | |
| virtual void | onInitialize () |
| void | initializeClients () |
| template<typename TOrthogonal , typename TClient > | |
| void | assignClientToOrthogonal (TClient *client) |
| Protected Attributes inherited from smacc2::ISmaccOrthogonal | |
| std::vector< std::shared_ptr< smacc2::ISmaccClient > > | clients_ |
Detailed Description
Definition at line 32 of file or_obstacle_perception.hpp.
Member Function Documentation
◆ onInitialize()
|
inlineoverridevirtual |
Reimplemented from smacc2::ISmaccOrthogonal.
Definition at line 35 of file or_obstacle_perception.hpp.
36 {
37 auto lidarClient = this->createClient<ClLidarSensor>();
38 lidarClient->createComponent<CpForwardObstacleDetector>();
39
40 lidarClient->topicName = "/scan";
41 lidarClient->timeout_ = rclcpp::Duration(std::chrono::seconds(10));
42 }
The documentation for this class was generated from the following file:
- smacc2_sm_reference_library/sm_dance_bot_warehouse_3/include/sm_dance_bot_warehouse_3/orthogonals/or_obstacle_perception.hpp