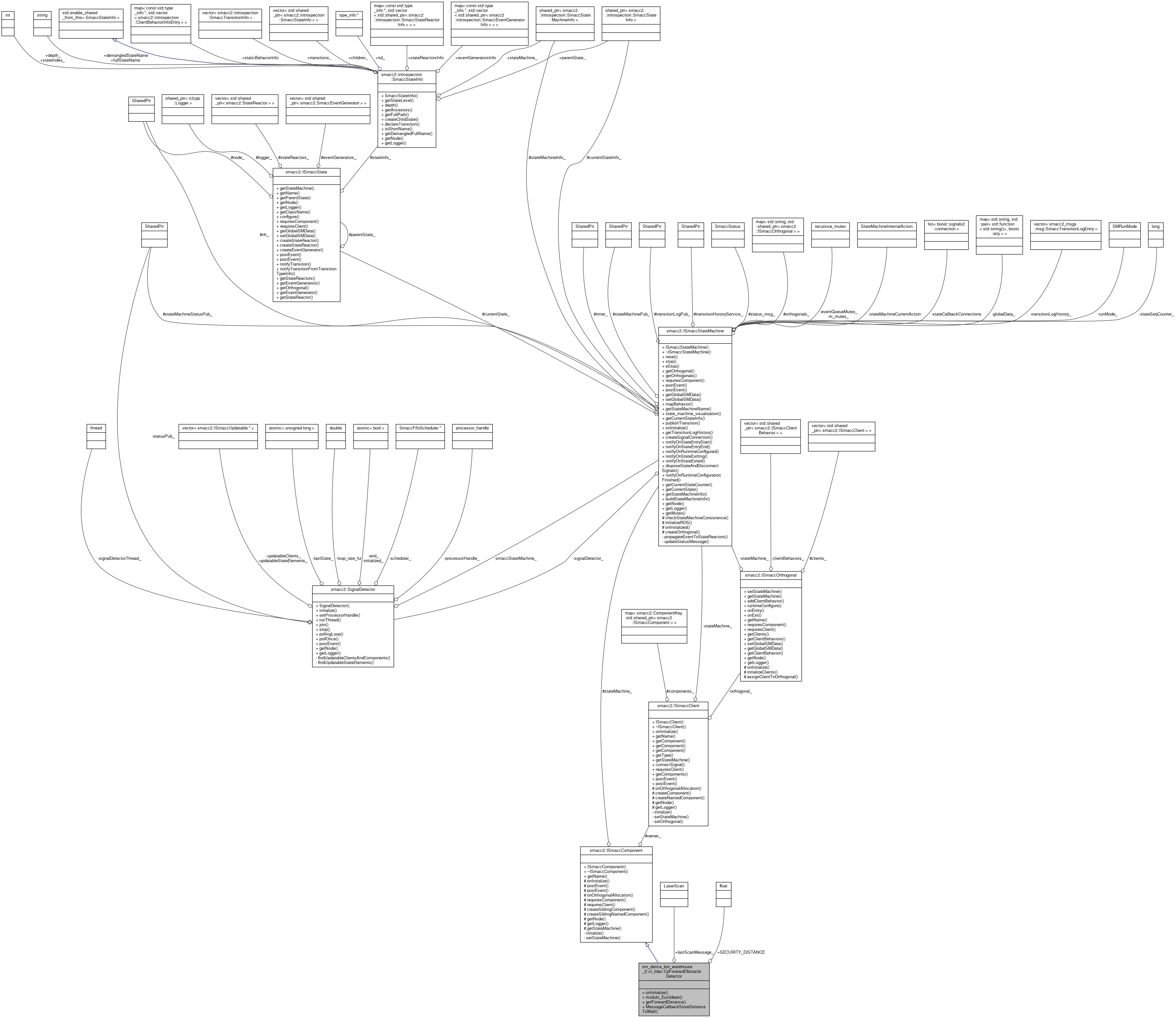
#include <cp_forward_obstacle_detector.hpp>
Public Member Functions | |
| void | onInitialize () override |
| int | modulo_Euclidean (int a, int b) |
| float | getForwardDistance (int raysWidthCount=0) |
| void | MessageCallbackStoreDistanceToWall (const sensor_msgs::msg::LaserScan &scanmsg) |
 Public Member Functions inherited from smacc2::ISmaccComponent Public Member Functions inherited from smacc2::ISmaccComponent | |
| ISmaccComponent () | |
| virtual | ~ISmaccComponent () |
| virtual std::string | getName () const |
Public Attributes | |
| sensor_msgs::msg::LaserScan | lastScanMessage_ |
| const float | SECURITY_DISTANCE = 0.4 |
Additional Inherited Members | |
| Protected Member Functions inherited from smacc2::ISmaccComponent | |
| virtual void | onInitialize () |
| template<typename EventType > | |
| void | postEvent (const EventType &ev) |
| template<typename EventType > | |
| void | postEvent () |
| template<typename TOrthogonal , typename TSourceObject > | |
| void | onOrthogonalAllocation () |
| template<typename TComponent > | |
| void | requiresComponent (TComponent *&requiredComponentStorage) |
| template<typename TClient > | |
| void | requiresClient (TClient *&requiredClientStorage) |
| template<typename SmaccComponentType , typename TOrthogonal , typename TClient , typename... TArgs> | |
| SmaccComponentType * | createSiblingComponent (TArgs... targs) |
| template<typename SmaccComponentType , typename TOrthogonal , typename TClient , typename... TArgs> | |
| SmaccComponentType * | createSiblingNamedComponent (std::string name, TArgs... targs) |
| rclcpp::Node::SharedPtr | getNode () |
| rclcpp::Logger | getLogger () |
| ISmaccStateMachine * | getStateMachine () |
| Protected Attributes inherited from smacc2::ISmaccComponent | |
| ISmaccStateMachine * | stateMachine_ |
| ISmaccClient * | owner_ |
Detailed Description
Definition at line 30 of file cp_forward_obstacle_detector.hpp.
Member Function Documentation
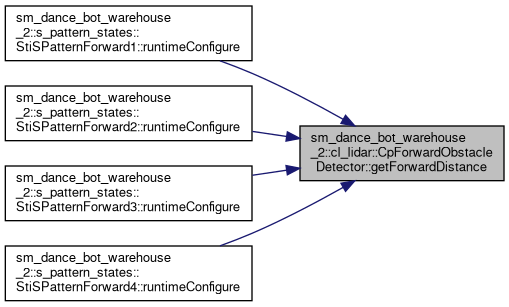
◆ getForwardDistance()
|
inline |
Definition at line 56 of file cp_forward_obstacle_detector.hpp.
References smacc2::ISmaccComponent::getLogger(), smacc2::ISmaccComponent::getName(), smacc2::ISmaccComponent::getNode(), lastScanMessage_, and SECURITY_DISTANCE.
Referenced by sm_dance_bot_warehouse_2::s_pattern_states::StiSPatternForward1::runtimeConfigure(), sm_dance_bot_warehouse_2::s_pattern_states::StiSPatternForward2::runtimeConfigure(), sm_dance_bot_warehouse_2::s_pattern_states::StiSPatternForward3::runtimeConfigure(), and sm_dance_bot_warehouse_2::s_pattern_states::StiSPatternForward4::runtimeConfigure().

◆ MessageCallbackStoreDistanceToWall()
|
inline |
Definition at line 113 of file cp_forward_obstacle_detector.hpp.
Referenced by onInitialize().

◆ modulo_Euclidean()
|
inline |
Definition at line 45 of file cp_forward_obstacle_detector.hpp.
◆ onInitialize()
|
inlineoverridevirtual |
Reimplemented from smacc2::ISmaccComponent.
Definition at line 37 of file cp_forward_obstacle_detector.hpp.
References MessageCallbackStoreDistanceToWall(), smacc2::client_bases::SmaccSubscriberClient< MessageType >::onMessageReceived(), and smacc2::ISmaccComponent::owner_.

Member Data Documentation
◆ lastScanMessage_
| sensor_msgs::msg::LaserScan sm_dance_bot_warehouse_2::cl_lidar::CpForwardObstacleDetector::lastScanMessage_ |
Definition at line 33 of file cp_forward_obstacle_detector.hpp.
Referenced by getForwardDistance().
◆ SECURITY_DISTANCE
| const float sm_dance_bot_warehouse_2::cl_lidar::CpForwardObstacleDetector::SECURITY_DISTANCE = 0.4 |
Definition at line 35 of file cp_forward_obstacle_detector.hpp.
Referenced by getForwardDistance().
The documentation for this class was generated from the following file:
- smacc2_sm_reference_library/sm_dance_bot_warehouse_2/include/sm_dance_bot_warehouse_2/clients/cl_lidar/components/cp_forward_obstacle_detector.hpp