#include <cl_ros_publisher.hpp>
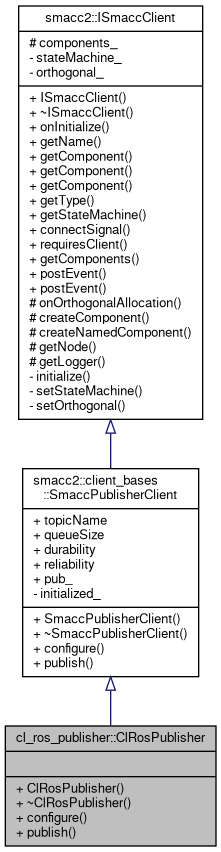
Inheritance diagram for cl_ros_publisher::ClRosPublisher:
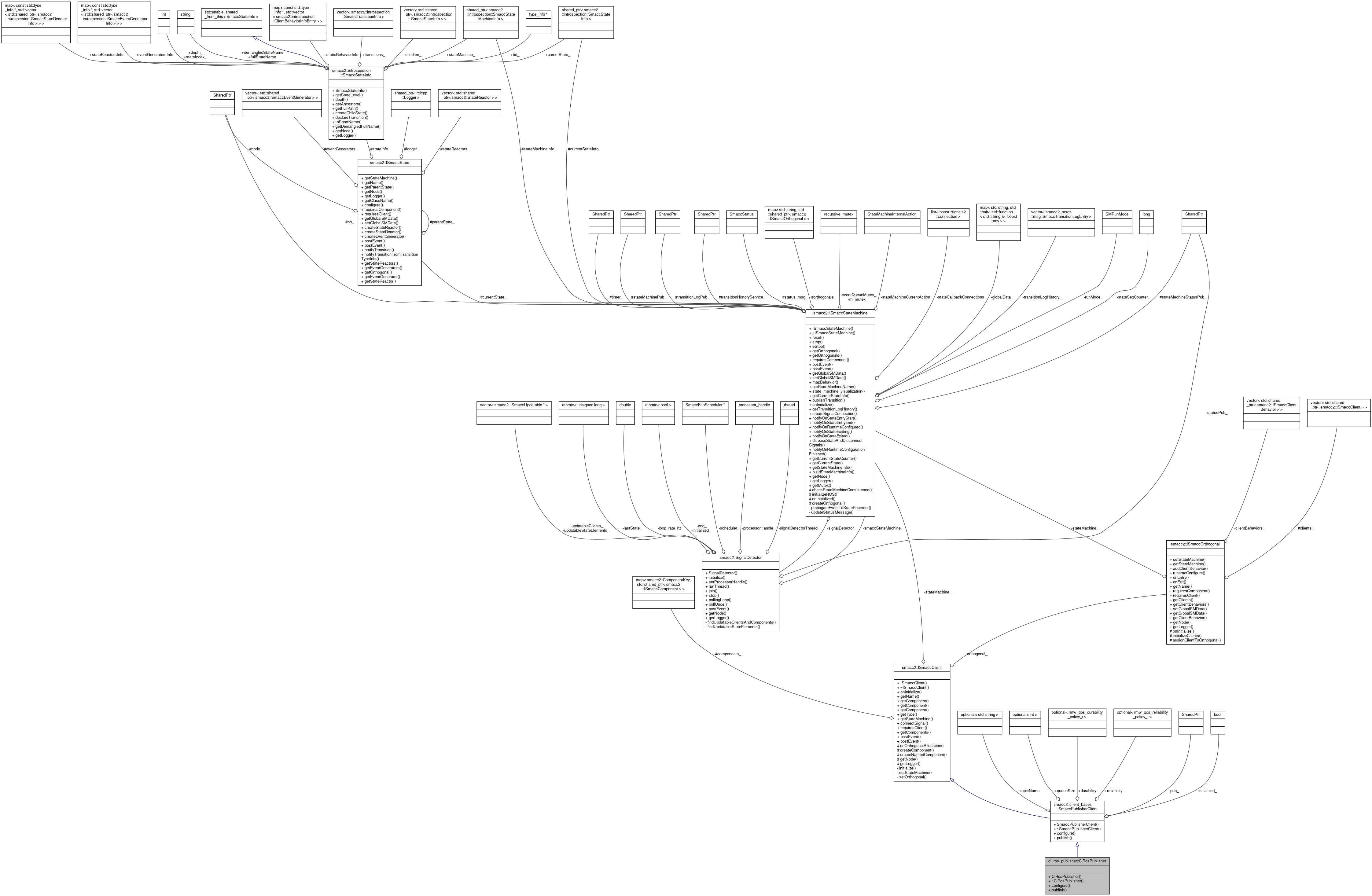
Collaboration diagram for cl_ros_publisher::ClRosPublisher:
Public Member Functions | |
| ClRosPublisher () | |
| ~ClRosPublisher () | |
| template<typename MessageType > | |
| void | configure (std::string topicName) |
| template<typename MessageType > | |
| void | publish (const MessageType &msg) |
 Public Member Functions inherited from smacc2::client_bases::SmaccPublisherClient Public Member Functions inherited from smacc2::client_bases::SmaccPublisherClient | |
| SmaccPublisherClient () | |
| virtual | ~SmaccPublisherClient () |
| template<typename MessageType > | |
| void | configure (std::string topicName) |
| template<typename MessageType > | |
| void | publish (const MessageType &msg) |
| Public Member Functions inherited from smacc2::ISmaccClient | |
| ISmaccClient () | |
| virtual | ~ISmaccClient () |
| virtual void | onInitialize () |
| virtual std::string | getName () const |
| template<typename TComponent > | |
| TComponent * | getComponent () |
| template<typename TComponent > | |
| TComponent * | getComponent (std::string name) |
| template<typename TComponent > | |
| TComponent * | getComponent (int index) |
| virtual smacc2::introspection::TypeInfo::Ptr | getType () |
| ISmaccStateMachine * | getStateMachine () |
| template<typename TSmaccSignal , typename T > | |
| void | connectSignal (TSmaccSignal &signal, void(T::*callback)(), T *object) |
| template<typename SmaccClientType > | |
| void | requiresClient (SmaccClientType *&storage) |
| void | getComponents (std::vector< std::shared_ptr< ISmaccComponent > > &components) |
| template<typename EventType > | |
| void | postEvent (const EventType &ev) |
| template<typename EventType > | |
| void | postEvent () |
Additional Inherited Members | |
| Public Attributes inherited from smacc2::client_bases::SmaccPublisherClient | |
| std::optional< std::string > | topicName |
| std::optional< int > | queueSize |
| std::optional< rmw_qos_durability_policy_t > | durability |
| std::optional< rmw_qos_reliability_policy_t > | reliability |
| rclcpp::PublisherBase::SharedPtr | pub_ |
| Protected Member Functions inherited from smacc2::ISmaccClient | |
| template<typename TOrthogonal , typename TSourceObject > | |
| void | onOrthogonalAllocation () |
| template<typename SmaccComponentType , typename TOrthogonal , typename TClient , typename... TArgs> | |
| SmaccComponentType * | createComponent (TArgs... targs) |
| template<typename SmaccComponentType , typename TOrthogonal , typename TClient , typename... TArgs> | |
| SmaccComponentType * | createNamedComponent (std::string name, TArgs... targs) |
| rclcpp::Node::SharedPtr | getNode () |
| rclcpp::Logger | getLogger () |
| Protected Attributes inherited from smacc2::ISmaccClient | |
| std::map< ComponentKey, std::shared_ptr< smacc2::ISmaccComponent > > | components_ |
Detailed Description
Definition at line 27 of file cl_ros_publisher.hpp.
Constructor & Destructor Documentation
◆ ClRosPublisher()
| cl_ros_publisher::ClRosPublisher::ClRosPublisher | ( | ) |
Definition at line 25 of file cl_ros_publisher_client.cpp.
25{}
◆ ~ClRosPublisher()
| cl_ros_publisher::ClRosPublisher::~ClRosPublisher | ( | ) |
Definition at line 27 of file cl_ros_publisher_client.cpp.
27{}
Member Function Documentation
◆ configure()
template<typename MessageType >
|
inline |
Definition at line 34 of file cl_ros_publisher.hpp.
35 {
36 SmaccPublisherClient::configure<MessageType>(topicName);
37 }
std::optional< std::string > topicName
Definition: smacc_publisher_client.hpp:33
References smacc2::client_bases::SmaccPublisherClient::topicName.
◆ publish()
template<typename MessageType >
|
inline |
Definition at line 40 of file cl_ros_publisher.hpp.
41 {
42 SmaccPublisherClient::publish(msg);
43 }
Referenced by cl_ros_publisher::CbDefaultPublishLoop::setMessage(), and cl_ros_publisher::CbPublishOnce< RosMsgType >::setMessage().
Here is the caller graph for this function:

The documentation for this class was generated from the following files:
- smacc2_client_library/ros_publisher_client/include/ros_publisher_client/cl_ros_publisher.hpp
- smacc2_client_library/ros_publisher_client/src/cl_ros_publisher_client.cpp