Public Types | |
| using | GoalHandleLEDControl = rclcpp_action::ServerGoalHandle< sm_dance_bot::action::LEDControl > |
| using | GoalHandleLEDControl = rclcpp_action::ServerGoalHandle< sm_dance_bot_strikes_back::action::LEDControl > |
| using | GoalHandleLEDControl = rclcpp_action::ServerGoalHandle< sm_dance_bot_warehouse::action::LEDControl > |
| using | GoalHandleLEDControl = rclcpp_action::ServerGoalHandle< sm_dance_bot_warehouse_2::action::LEDControl > |
| using | GoalHandleLEDControl = rclcpp_action::ServerGoalHandle< sm_dance_bot_warehouse_3::action::LEDControl > |
Public Member Functions | |
| LEDActionServer (const rclcpp::NodeOptions &options=rclcpp::NodeOptions()) | |
| void | execute (const std::shared_ptr< GoalHandleLEDControl > gh) |
| rclcpp_action::GoalResponse | handle_goal (const rclcpp_action::GoalUUID &, std::shared_ptr< const sm_dance_bot::action::LEDControl::Goal >) |
| rclcpp_action::CancelResponse | handle_cancel (const std::shared_ptr< GoalHandleLEDControl >) |
| void | handle_accepted (const std::shared_ptr< GoalHandleLEDControl > goal_handle) |
| void | run () |
| void | publishStateMarker () |
| LEDActionServer (const rclcpp::NodeOptions &options=rclcpp::NodeOptions()) | |
| void | execute (const std::shared_ptr< GoalHandleLEDControl > gh) |
| rclcpp_action::GoalResponse | handle_goal (const rclcpp_action::GoalUUID &, std::shared_ptr< const sm_dance_bot_strikes_back::action::LEDControl::Goal >) |
| rclcpp_action::CancelResponse | handle_cancel (const std::shared_ptr< GoalHandleLEDControl >) |
| void | handle_accepted (const std::shared_ptr< GoalHandleLEDControl > goal_handle) |
| void | run () |
| void | publishStateMarker () |
| LEDActionServer (const rclcpp::NodeOptions &options=rclcpp::NodeOptions()) | |
| void | execute (const std::shared_ptr< GoalHandleLEDControl > gh) |
| rclcpp_action::GoalResponse | handle_goal (const rclcpp_action::GoalUUID &, std::shared_ptr< const sm_dance_bot_warehouse::action::LEDControl::Goal >) |
| rclcpp_action::CancelResponse | handle_cancel (const std::shared_ptr< GoalHandleLEDControl >) |
| void | handle_accepted (const std::shared_ptr< GoalHandleLEDControl > goal_handle) |
| void | run () |
| void | publishStateMarker () |
| LEDActionServer (const rclcpp::NodeOptions &options=rclcpp::NodeOptions()) | |
| void | execute (const std::shared_ptr< GoalHandleLEDControl > gh) |
| rclcpp_action::GoalResponse | handle_goal (const rclcpp_action::GoalUUID &, std::shared_ptr< const sm_dance_bot_warehouse_2::action::LEDControl::Goal >) |
| rclcpp_action::CancelResponse | handle_cancel (const std::shared_ptr< GoalHandleLEDControl >) |
| void | handle_accepted (const std::shared_ptr< GoalHandleLEDControl > goal_handle) |
| void | run () |
| void | publishStateMarker () |
| LEDActionServer (const rclcpp::NodeOptions &options=rclcpp::NodeOptions()) | |
| void | execute (const std::shared_ptr< GoalHandleLEDControl > gh) |
| rclcpp_action::GoalResponse | handle_goal (const rclcpp_action::GoalUUID &, std::shared_ptr< const sm_dance_bot_warehouse_3::action::LEDControl::Goal >) |
| rclcpp_action::CancelResponse | handle_cancel (const std::shared_ptr< GoalHandleLEDControl >) |
| void | handle_accepted (const std::shared_ptr< GoalHandleLEDControl > goal_handle) |
| void | run () |
| void | publishStateMarker () |
Public Attributes | |
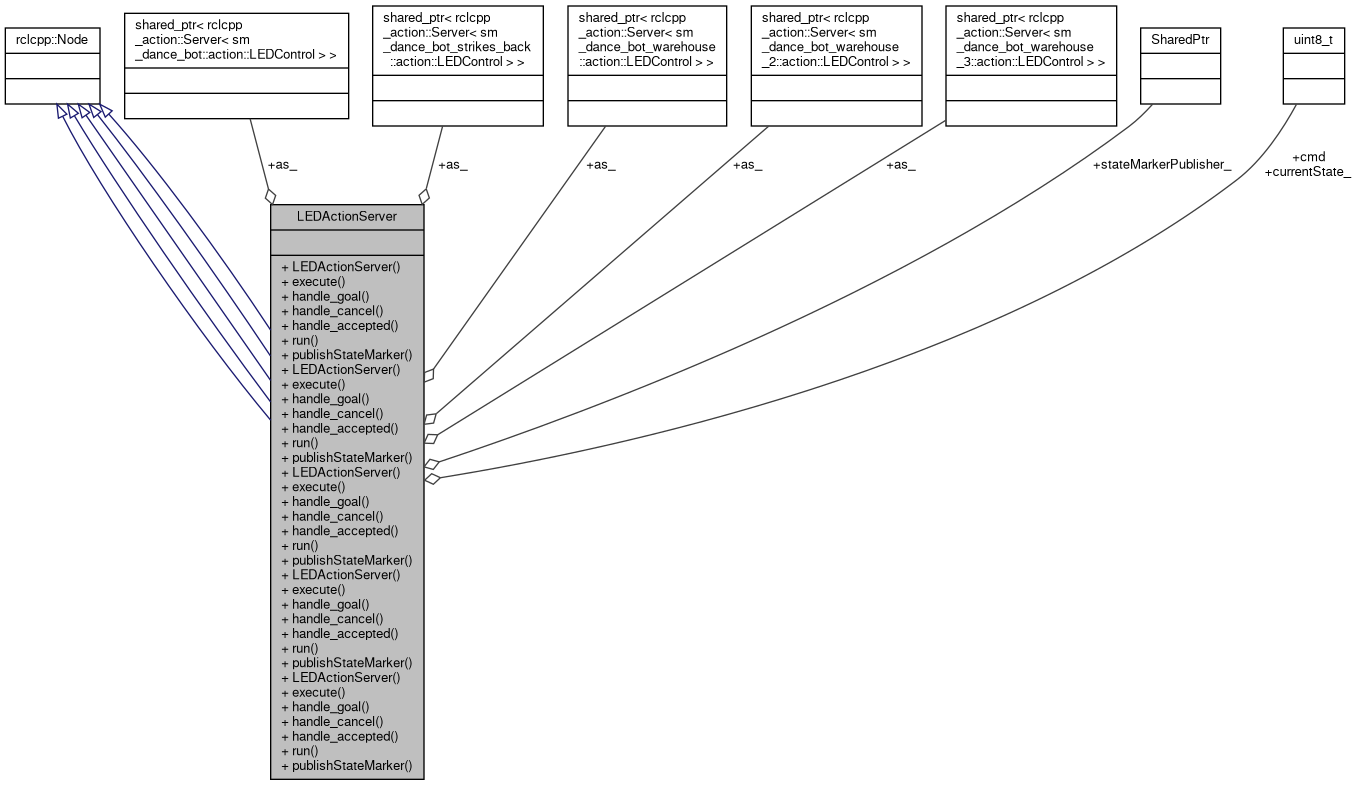
| std::shared_ptr< rclcpp_action::Server< sm_dance_bot::action::LEDControl > > | as_ |
| rclcpp::Publisher< visualization_msgs::msg::MarkerArray >::SharedPtr | stateMarkerPublisher_ |
| uint8_t | cmd |
| uint8_t | currentState_ |
| std::shared_ptr< rclcpp_action::Server< sm_dance_bot_strikes_back::action::LEDControl > > | as_ |
| std::shared_ptr< rclcpp_action::Server< sm_dance_bot_warehouse::action::LEDControl > > | as_ |
| std::shared_ptr< rclcpp_action::Server< sm_dance_bot_warehouse_2::action::LEDControl > > | as_ |
| std::shared_ptr< rclcpp_action::Server< sm_dance_bot_warehouse_3::action::LEDControl > > | as_ |
Detailed Description
Definition at line 39 of file led_action_server_node.cpp.
Member Typedef Documentation
◆ GoalHandleLEDControl [1/5]
| using LEDActionServer::GoalHandleLEDControl = rclcpp_action::ServerGoalHandle<sm_dance_bot::action::LEDControl> |
Definition at line 43 of file led_action_server_node.cpp.
◆ GoalHandleLEDControl [2/5]
| using LEDActionServer::GoalHandleLEDControl = rclcpp_action::ServerGoalHandle<sm_dance_bot_strikes_back::action::LEDControl> |
Definition at line 43 of file led_action_server_node.cpp.
◆ GoalHandleLEDControl [3/5]
| using LEDActionServer::GoalHandleLEDControl = rclcpp_action::ServerGoalHandle<sm_dance_bot_warehouse::action::LEDControl> |
Definition at line 43 of file led_action_server_node.cpp.
◆ GoalHandleLEDControl [4/5]
| using LEDActionServer::GoalHandleLEDControl = rclcpp_action::ServerGoalHandle<sm_dance_bot_warehouse_2::action::LEDControl> |
Definition at line 43 of file led_action_server_node.cpp.
◆ GoalHandleLEDControl [5/5]
| using LEDActionServer::GoalHandleLEDControl = rclcpp_action::ServerGoalHandle<sm_dance_bot_warehouse_3::action::LEDControl> |
Definition at line 43 of file led_action_server_node.cpp.
Constructor & Destructor Documentation
◆ LEDActionServer() [1/5]
|
inline |
constructor()
Definition at line 57 of file led_action_server_node.cpp.
References currentState_.
◆ LEDActionServer() [2/5]
|
inline |
constructor()
Definition at line 57 of file led_action_server_node.cpp.
References currentState_.
◆ LEDActionServer() [3/5]
|
inline |
constructor()
Definition at line 57 of file led_action_server_node.cpp.
References currentState_.
◆ LEDActionServer() [4/5]
|
inline |
constructor()
Definition at line 57 of file led_action_server_node.cpp.
References currentState_.
◆ LEDActionServer() [5/5]
|
inline |
constructor()
Definition at line 57 of file led_action_server_node.cpp.
References currentState_.
Member Function Documentation
◆ execute() [1/5]
|
inline |
Definition at line 68 of file led_action_server_node.cpp.
References cmd, currentState_, and publishStateMarker().
Referenced by handle_accepted().


◆ execute() [2/5]
|
inline |
Definition at line 68 of file led_action_server_node.cpp.
References cmd, currentState_, and publishStateMarker().
◆ execute() [3/5]
|
inline |
Definition at line 68 of file led_action_server_node.cpp.
References cmd, currentState_, and publishStateMarker().
◆ execute() [4/5]
|
inline |
Definition at line 68 of file led_action_server_node.cpp.
References cmd, currentState_, and publishStateMarker().
◆ execute() [5/5]
|
inline |
Definition at line 68 of file led_action_server_node.cpp.
References cmd, currentState_, and publishStateMarker().
◆ handle_accepted() [1/5]
|
inline |
Definition at line 132 of file led_action_server_node.cpp.
References execute().
Referenced by run().


◆ handle_accepted() [2/5]
|
inline |
Definition at line 132 of file led_action_server_node.cpp.
References execute().
◆ handle_accepted() [3/5]
|
inline |
Definition at line 132 of file led_action_server_node.cpp.
References execute().
◆ handle_accepted() [4/5]
|
inline |
Definition at line 132 of file led_action_server_node.cpp.
References execute().
◆ handle_accepted() [5/5]
|
inline |
Definition at line 132 of file led_action_server_node.cpp.
References execute().
◆ handle_cancel() [1/5]
|
inline |
Definition at line 124 of file led_action_server_node.cpp.
Referenced by run().

◆ handle_cancel() [2/5]
|
inline |
Definition at line 124 of file led_action_server_node.cpp.
◆ handle_cancel() [3/5]
|
inline |
Definition at line 124 of file led_action_server_node.cpp.
◆ handle_cancel() [4/5]
|
inline |
Definition at line 124 of file led_action_server_node.cpp.
◆ handle_cancel() [5/5]
|
inline |
Definition at line 124 of file led_action_server_node.cpp.
◆ handle_goal() [1/5]
|
inline |
Definition at line 109 of file led_action_server_node.cpp.
Referenced by run().

◆ handle_goal() [2/5]
|
inline |
Definition at line 109 of file led_action_server_node.cpp.
◆ handle_goal() [3/5]
|
inline |
Definition at line 109 of file led_action_server_node.cpp.
◆ handle_goal() [4/5]
|
inline |
Definition at line 109 of file led_action_server_node.cpp.
◆ handle_goal() [5/5]
|
inline |
Definition at line 109 of file led_action_server_node.cpp.
◆ publishStateMarker() [1/5]
|
inline |
Definition at line 165 of file led_action_server_node.cpp.
References currentState_, and stateMarkerPublisher_.
Referenced by execute().

◆ publishStateMarker() [2/5]
|
inline |
Definition at line 165 of file led_action_server_node.cpp.
References currentState_, and stateMarkerPublisher_.
◆ publishStateMarker() [3/5]
|
inline |
Definition at line 165 of file led_action_server_node.cpp.
References currentState_, and stateMarkerPublisher_.
◆ publishStateMarker() [4/5]
|
inline |
Definition at line 165 of file led_action_server_node.cpp.
References currentState_, and stateMarkerPublisher_.
◆ publishStateMarker() [5/5]
|
inline |
Definition at line 165 of file led_action_server_node.cpp.
References currentState_, and stateMarkerPublisher_.
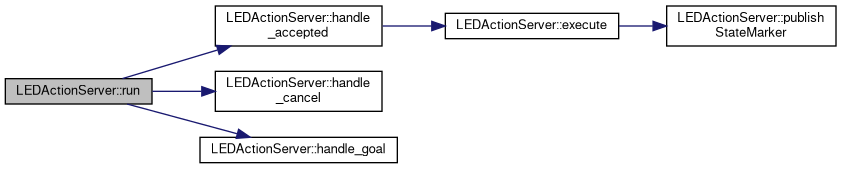
◆ run() [1/5]
|
inline |
Definition at line 144 of file led_action_server_node.cpp.
References handle_accepted(), handle_cancel(), handle_goal(), and stateMarkerPublisher_.
◆ run() [2/5]
|
inline |
Definition at line 144 of file led_action_server_node.cpp.
References handle_accepted(), handle_cancel(), handle_goal(), and stateMarkerPublisher_.
◆ run() [3/5]
|
inline |
Definition at line 144 of file led_action_server_node.cpp.
References handle_accepted(), handle_cancel(), handle_goal(), and stateMarkerPublisher_.
◆ run() [4/5]
|
inline |
Definition at line 144 of file led_action_server_node.cpp.
References handle_accepted(), handle_cancel(), handle_goal(), and stateMarkerPublisher_.
◆ run() [5/5]
|
inline |
Definition at line 144 of file led_action_server_node.cpp.
References handle_accepted(), handle_cancel(), handle_goal(), and stateMarkerPublisher_.
Member Data Documentation
◆ as_ [1/5]
| std::shared_ptr<rclcpp_action::Server<sm_dance_bot::action::LEDControl> > LEDActionServer::as_ |
Definition at line 42 of file led_action_server_node.cpp.
◆ as_ [2/5]
| std::shared_ptr<rclcpp_action::Server<sm_dance_bot_strikes_back::action::LEDControl> > LEDActionServer::as_ |
Definition at line 42 of file led_action_server_node.cpp.
◆ as_ [3/5]
| std::shared_ptr<rclcpp_action::Server<sm_dance_bot_warehouse::action::LEDControl> > LEDActionServer::as_ |
Definition at line 42 of file led_action_server_node.cpp.
◆ as_ [4/5]
| std::shared_ptr<rclcpp_action::Server<sm_dance_bot_warehouse_2::action::LEDControl> > LEDActionServer::as_ |
Definition at line 42 of file led_action_server_node.cpp.
◆ as_ [5/5]
| std::shared_ptr<rclcpp_action::Server<sm_dance_bot_warehouse_3::action::LEDControl> > LEDActionServer::as_ |
Definition at line 42 of file led_action_server_node.cpp.
◆ cmd
| uint8_t LEDActionServer::cmd |
Definition at line 48 of file led_action_server_node.cpp.
Referenced by execute().
◆ currentState_
| uint8_t LEDActionServer::currentState_ |
Definition at line 50 of file led_action_server_node.cpp.
Referenced by execute(), LEDActionServer(), and publishStateMarker().
◆ stateMarkerPublisher_
| rclcpp::Publisher< visualization_msgs::msg::MarkerArray >::SharedPtr LEDActionServer::stateMarkerPublisher_ |
Definition at line 46 of file led_action_server_node.cpp.
Referenced by publishStateMarker(), and run().
The documentation for this class was generated from the following files:
- smacc2_sm_reference_library/sm_dance_bot/servers/led_action_server/src/led_action_server_node.cpp
- smacc2_sm_reference_library/sm_dance_bot_strikes_back/servers/led_action_server/src/led_action_server_node.cpp
- smacc2_sm_reference_library/sm_dance_bot_warehouse/servers/led_action_server/src/led_action_server_node.cpp
- smacc2_sm_reference_library/sm_dance_bot_warehouse_2/servers/led_action_server/src/led_action_server_node.cpp
- smacc2_sm_reference_library/sm_dance_bot_warehouse_3/servers/led_action_server/src/led_action_server_node.cpp