cp_joint_space_trajectory_planner.hpp File Reference
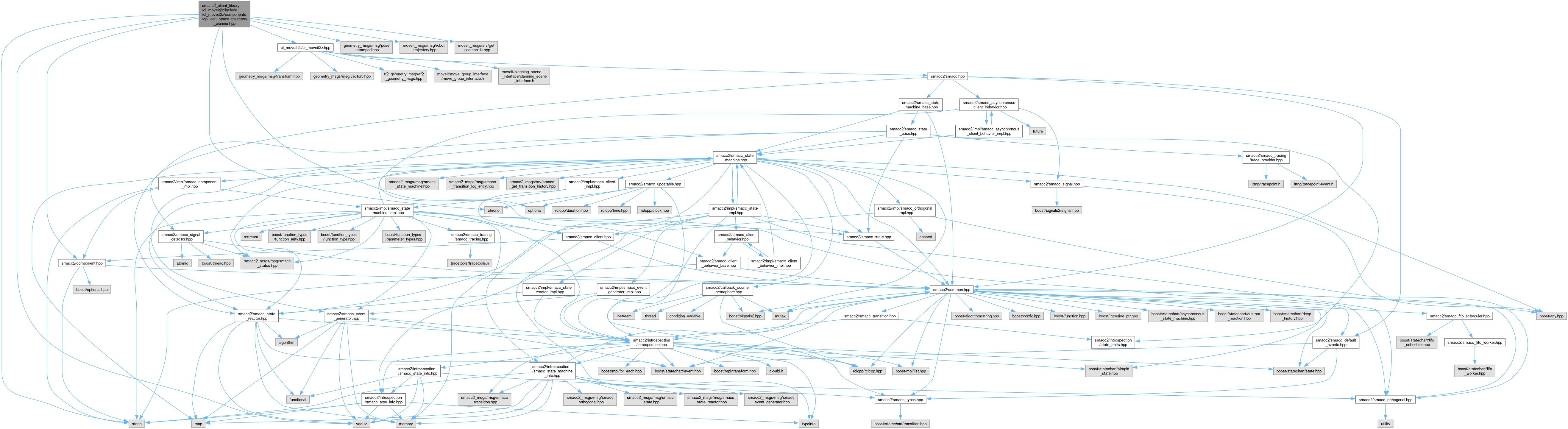
#include <smacc2/component.hpp>#include <cl_moveit2z/cl_moveit2z.hpp>#include <geometry_msgs/msg/pose_stamped.hpp>#include <moveit_msgs/msg/robot_trajectory.hpp>#include <moveit_msgs/srv/get_position_ik.hpp>#include <chrono>#include <optional>#include <string>#include <vector>
Include dependency graph for cp_joint_space_trajectory_planner.hpp:
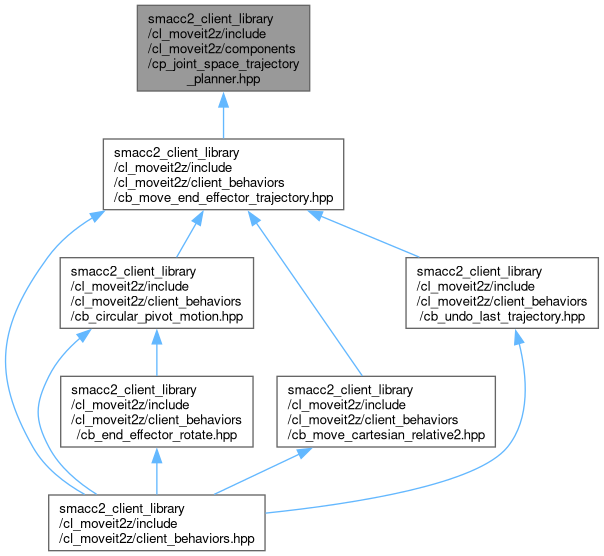
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | cl_moveit2z::JointTrajectoryOptions |
| Configuration options for joint space trajectory planning. More... | |
| struct | cl_moveit2z::JointTrajectoryResult |
| Result of a joint space trajectory planning operation. More... | |
| class | cl_moveit2z::CpJointSpaceTrajectoryPlanner |
| Component for joint space trajectory generation from Cartesian waypoints. More... | |
Namespaces | |
| namespace | cl_moveit2z |
Enumerations | |
| enum class | cl_moveit2z::JointTrajectoryErrorCode { cl_moveit2z::SUCCESS , cl_moveit2z::INCORRECT_INITIAL_STATE , cl_moveit2z::JOINT_TRAJECTORY_DISCONTINUITY , cl_moveit2z::IK_SOLUTION_FAILED , cl_moveit2z::EMPTY_WAYPOINT_LIST } |
| Error codes for joint space trajectory computation. More... | |
Generated by