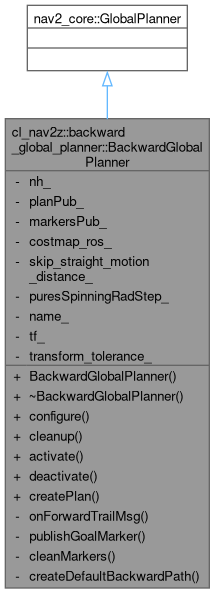
#include <backward_global_planner.hpp>
Public Member Functions | |
| BackwardGlobalPlanner () | |
| virtual | ~BackwardGlobalPlanner () |
| Virtual destructor. | |
| virtual void | configure (const rclcpp_lifecycle::LifecycleNode::WeakPtr &parent, std::string name, std::shared_ptr< tf2_ros::Buffer > tf, std::shared_ptr< nav2_costmap_2d::Costmap2DROS > costmap_ros) |
| virtual void | cleanup () |
| Method to cleanup resources used on shutdown. | |
| virtual void | activate () |
| Method to active planner and any threads involved in execution. | |
| virtual void | deactivate () |
| Method to deactivate planner and any threads involved in execution. | |
| virtual nav_msgs::msg::Path | createPlan (const geometry_msgs::msg::PoseStamped &start, const geometry_msgs::msg::PoseStamped &goal) |
| Method create the plan from a starting and ending goal. | |
Private Member Functions | |
| void | onForwardTrailMsg (const nav_msgs::msg::Path::ConstSharedPtr &trailMessage) |
| void | publishGoalMarker (const geometry_msgs::msg::Pose &pose, double r, double g, double b) |
| void | cleanMarkers () |
| void | createDefaultBackwardPath (const geometry_msgs::msg::PoseStamped &start, const geometry_msgs::msg::PoseStamped &goal, std::vector< geometry_msgs::msg::PoseStamped > &plan) |
Private Attributes | |
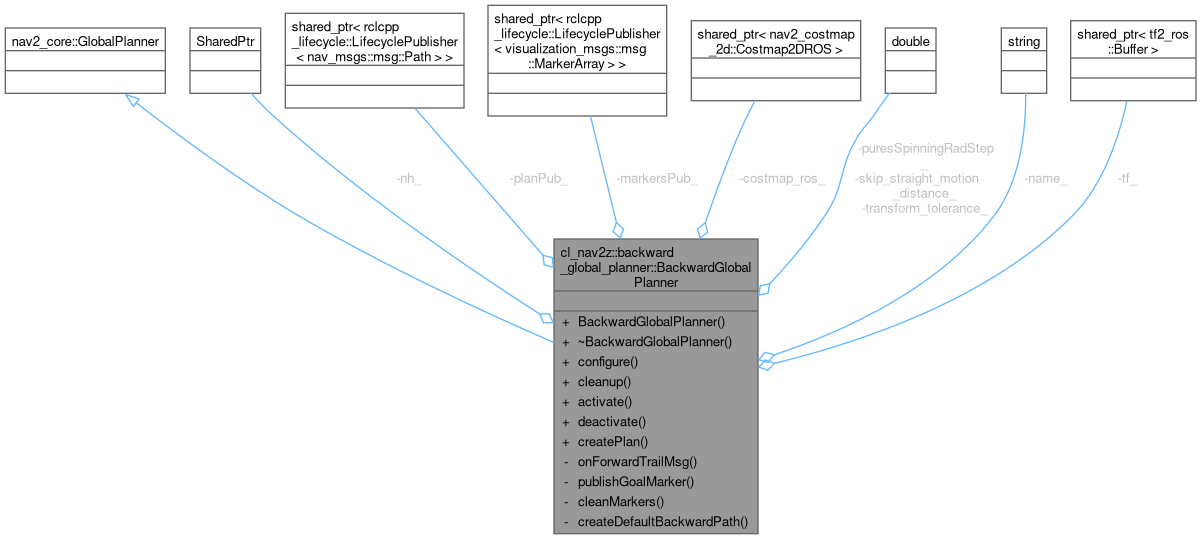
| rclcpp_lifecycle::LifecycleNode::SharedPtr | nh_ |
| std::shared_ptr< rclcpp_lifecycle::LifecyclePublisher< nav_msgs::msg::Path > > | planPub_ |
| std::shared_ptr< rclcpp_lifecycle::LifecyclePublisher< visualization_msgs::msg::MarkerArray > > | markersPub_ |
| std::shared_ptr< nav2_costmap_2d::Costmap2DROS > | costmap_ros_ |
| double | skip_straight_motion_distance_ |
| double | puresSpinningRadStep_ |
| std::string | name_ |
| std::shared_ptr< tf2_ros::Buffer > | tf_ |
| double | transform_tolerance_ |
Detailed Description
Definition at line 31 of file backward_global_planner.hpp.
Constructor & Destructor Documentation
◆ BackwardGlobalPlanner()
| cl_nav2z::backward_global_planner::BackwardGlobalPlanner::BackwardGlobalPlanner | ( | ) |
Constructor()
Definition at line 49 of file backward_global_planner.cpp.
References puresSpinningRadStep_, and skip_straight_motion_distance_.
◆ ~BackwardGlobalPlanner()
|
virtual |
Member Function Documentation
◆ activate()
|
virtual |
Method to active planner and any threads involved in execution.
Definition at line 95 of file backward_global_planner.cpp.
References markersPub_, nh_, and planPub_.
◆ cleanMarkers()
|
private |
Definition at line 162 of file backward_global_planner.cpp.
References costmap_ros_, markersPub_, and nh_.
Referenced by cleanup(), and deactivate().

◆ cleanup()
|
virtual |
Method to cleanup resources used on shutdown.
Definition at line 88 of file backward_global_planner.cpp.
References cleanMarkers().

◆ configure()
|
virtual |
- Parameters
-
parent pointer to user's node name The name of this planner tf A pointer to a TF buffer costmap_ros A pointer to the costmap
initialize()
Definition at line 62 of file backward_global_planner.cpp.
References costmap_ros_, declareOrSet(), markersPub_, name_, nh_, planPub_, tf_, and transform_tolerance_.

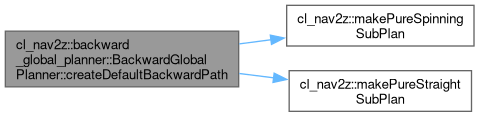
◆ createDefaultBackwardPath()
|
private |
defaultBackwardPath()
Definition at line 182 of file backward_global_planner.cpp.
References cl_nav2z::makePureSpinningSubPlan(), cl_nav2z::makePureStraightSubPlan(), nh_, puresSpinningRadStep_, and skip_straight_motion_distance_.
Referenced by createPlan().

◆ createPlan()
|
virtual |
Method create the plan from a starting and ending goal.
- Parameters
-
start The starting pose of the robot goal The goal pose of the robot
- Returns
- The sequence of poses to get from start to goal, if any
makePlan()
Definition at line 228 of file backward_global_planner.cpp.
References costmap_ros_, createDefaultBackwardPath(), nh_, planPub_, publishGoalMarker(), tf_, and transform_tolerance_.

◆ deactivate()
|
virtual |
Method to deactivate planner and any threads involved in execution.
Definition at line 107 of file backward_global_planner.cpp.
References cleanMarkers(), markersPub_, nh_, and planPub_.

◆ onForwardTrailMsg()
|
private |
◆ publishGoalMarker()
|
private |
Definition at line 126 of file backward_global_planner.cpp.
References costmap_ros_, markersPub_, and nh_.
Referenced by createPlan().

Member Data Documentation
◆ costmap_ros_
|
private |
Definition at line 85 of file backward_global_planner.hpp.
Referenced by cleanMarkers(), configure(), createPlan(), and publishGoalMarker().
◆ markersPub_
|
private |
Definition at line 83 of file backward_global_planner.hpp.
Referenced by activate(), cleanMarkers(), configure(), deactivate(), and publishGoalMarker().
◆ name_
|
private |
Definition at line 96 of file backward_global_planner.hpp.
Referenced by configure().
◆ nh_
|
private |
Definition at line 78 of file backward_global_planner.hpp.
Referenced by activate(), cleanMarkers(), configure(), createDefaultBackwardPath(), createPlan(), deactivate(), and publishGoalMarker().
◆ planPub_
|
private |
Definition at line 80 of file backward_global_planner.hpp.
Referenced by activate(), configure(), createPlan(), and deactivate().
◆ puresSpinningRadStep_
|
private |
Definition at line 94 of file backward_global_planner.hpp.
Referenced by BackwardGlobalPlanner(), and createDefaultBackwardPath().
◆ skip_straight_motion_distance_
|
private |
Definition at line 92 of file backward_global_planner.hpp.
Referenced by BackwardGlobalPlanner(), and createDefaultBackwardPath().
◆ tf_
|
private |
Definition at line 98 of file backward_global_planner.hpp.
Referenced by configure(), and createPlan().
◆ transform_tolerance_
|
private |
Definition at line 100 of file backward_global_planner.hpp.
Referenced by configure(), and createPlan().
The documentation for this class was generated from the following files:
- smacc2_client_library/nav2z_client/custom_planners/backward_global_planner/include/backward_global_planner/backward_global_planner.hpp
- smacc2_client_library/nav2z_client/custom_planners/backward_global_planner/src/backward_global_planner/backward_global_planner.cpp
Generated by