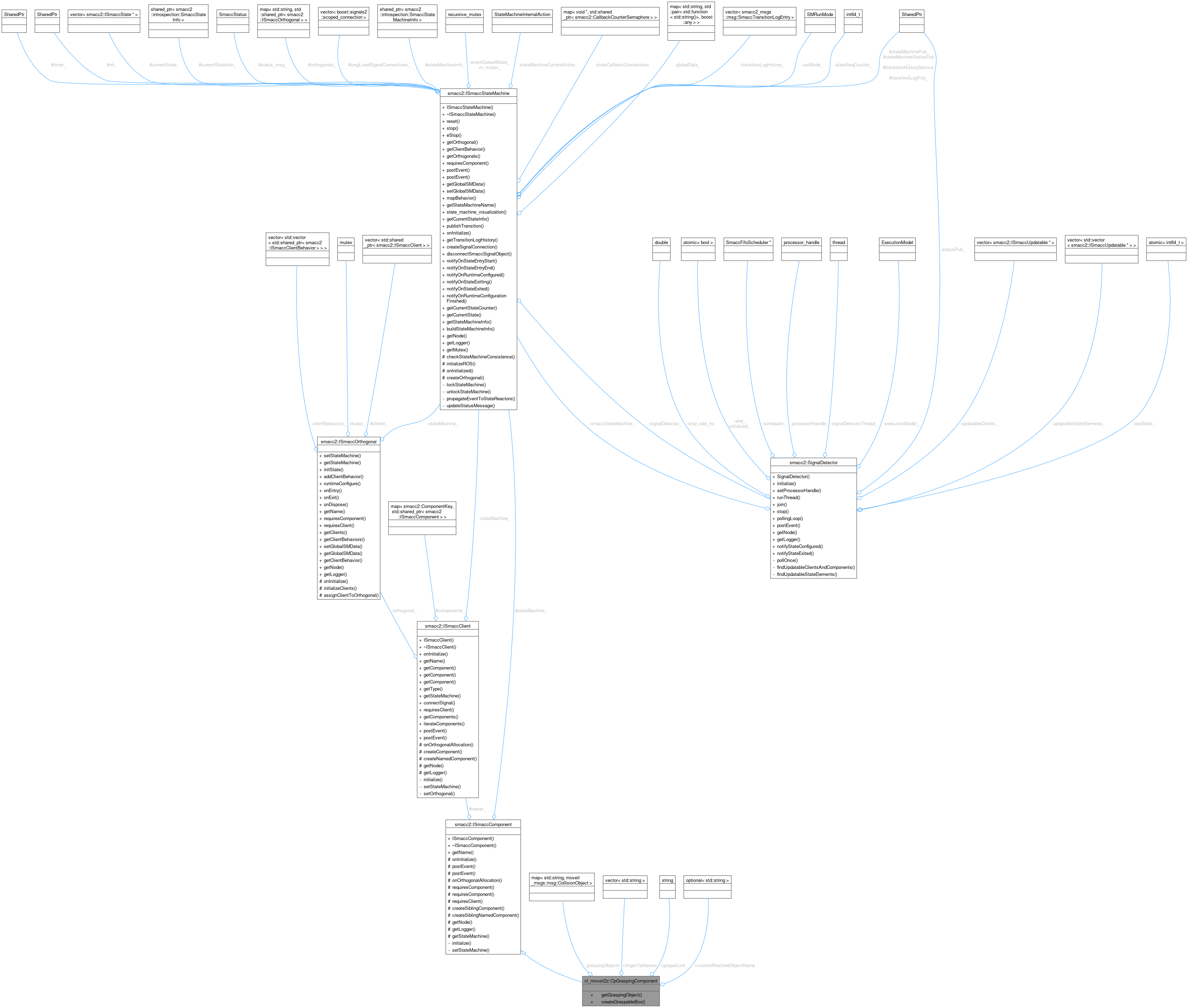
#include <cp_grasping_objects.hpp>
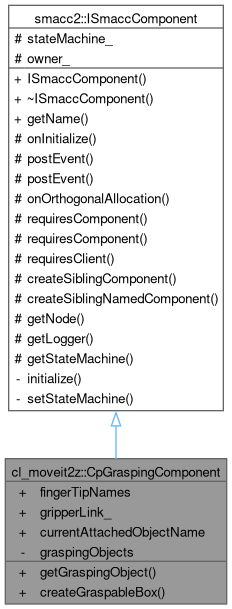
Public Member Functions | |
| bool | getGraspingObject (std::string name, moveit_msgs::msg::CollisionObject &object) |
| void | createGraspableBox (std::string frameid, float x, float y, float z, float xl, float yl, float zl) |
| bool | getGraspingObject (std::string name, moveit_msgs::msg::CollisionObject &object) |
| void | createGraspableBox (std::string frameid, float x, float y, float z, float xl, float yl, float zl) |
 Public Member Functions inherited from smacc2::ISmaccComponent Public Member Functions inherited from smacc2::ISmaccComponent | |
| ISmaccComponent () | |
| virtual | ~ISmaccComponent () |
| virtual std::string | getName () const |
Public Attributes | |
| std::vector< std::string > | fingerTipNames |
| std::string | gripperLink_ = "gripper_link" |
| std::optional< std::string > | currentAttachedObjectName |
Private Attributes | |
| std::map< std::string, moveit_msgs::msg::CollisionObject > | graspingObjects |
Additional Inherited Members | |
| Protected Member Functions inherited from smacc2::ISmaccComponent | |
| virtual void | onInitialize () |
| template<typename TOrthogonal , typename TClient > | |
| void | onComponentInitialization () |
| template<typename EventType > | |
| void | postEvent (const EventType &ev) |
| template<typename EventType > | |
| void | postEvent () |
| template<typename TOrthogonal , typename TSourceObject > | |
| void | onOrthogonalAllocation () |
| template<typename TOrthogonal , typename TSourceObject > | |
| void | onStateOrthogonalAllocation () |
| template<typename TComponent > | |
| void | requiresComponent (TComponent *&requiredComponentStorage, bool throwExceptionIfNotExist) |
| template<typename TComponent > | |
| void | requiresComponent (std::string name, TComponent *&requiredComponentStorage, bool throwExceptionIfNotExist) |
| template<typename TComponent > | |
| void | requiresComponent (TComponent *&requiredComponentStorage, ComponentRequirement requirementType=ComponentRequirement::SOFT) |
| template<typename TComponent > | |
| void | requiresComponent (std::string name, TComponent *&requiredComponentStorage, ComponentRequirement requirementType=ComponentRequirement::SOFT) |
| template<typename TClient > | |
| void | requiresClient (TClient *&requiredClientStorage) |
| template<typename SmaccComponentType , typename TOrthogonal , typename TClient , typename... TArgs> | |
| SmaccComponentType * | createSiblingComponent (TArgs... targs) |
| template<typename SmaccComponentType , typename TOrthogonal , typename TClient , typename... TArgs> | |
| SmaccComponentType * | createSiblingNamedComponent (std::string name, TArgs... targs) |
| rclcpp::Node::SharedPtr | getNode () |
| rclcpp::Logger | getLogger () const |
| ISmaccStateMachine * | getStateMachine () |
| Protected Attributes inherited from smacc2::ISmaccComponent | |
| ISmaccStateMachine * | stateMachine_ |
| ISmaccClient * | owner_ |
Detailed Description
Definition at line 30 of file cp_grasping_objects.hpp.
Member Function Documentation
◆ createGraspableBox() [1/2]
|
inline |
Definition at line 54 of file cp_grasping_objects.hpp.
References smacc2::ISmaccComponent::getLogger(), smacc2::ISmaccComponent::getName(), and graspingObjects.

◆ createGraspableBox() [2/2]
| void cl_moveit2z::CpGraspingComponent::createGraspableBox | ( | std::string | frameid, |
| float | x, | ||
| float | y, | ||
| float | z, | ||
| float | xl, | ||
| float | yl, | ||
| float | zl ) |
◆ getGraspingObject() [1/2]
|
inline |
Definition at line 41 of file cp_grasping_objects.hpp.
Referenced by cl_moveit2z::CbAttachObject::onEntry().

◆ getGraspingObject() [2/2]
| bool cl_moveit2z::CpGraspingComponent::getGraspingObject | ( | std::string | name, |
| moveit_msgs::msg::CollisionObject & | object ) |
Member Data Documentation
◆ currentAttachedObjectName
| std::optional< std::string > cl_moveit2z::CpGraspingComponent::currentAttachedObjectName |
Definition at line 39 of file cp_grasping_objects.hpp.
Referenced by cl_moveit2z::CbAttachObject::onEntry(), and cl_moveit2z::CbDetachObject::onEntry().
◆ fingerTipNames
| std::vector< std::string > cl_moveit2z::CpGraspingComponent::fingerTipNames |
Definition at line 36 of file cp_grasping_objects.hpp.
Referenced by cl_moveit2z::CbAttachObject::onEntry().
◆ graspingObjects
|
private |
Definition at line 33 of file cp_grasping_objects.hpp.
Referenced by createGraspableBox().
◆ gripperLink_
| std::string cl_moveit2z::CpGraspingComponent::gripperLink_ = "gripper_link" |
Definition at line 37 of file cp_grasping_objects.hpp.
Referenced by cl_moveit2z::CbAttachObject::onEntry().
The documentation for this class was generated from the following files:
- smacc2_client_library/cl_moveit2z/include/cl_moveit2z/components/cp_grasping_objects.hpp
- smacc2_client_library/moveit2z_client/include/moveit2z_client/components/cp_grasping_objects.hpp
- smacc2_client_library/moveit2z_client/src/moveit2z_client/components/cp_grasping_objects.cpp
Generated by