#include <lifecyclenode_client.hpp>

Public Member Functions | |
| ClLifecycleNode (std::string nodeName) | |
| virtual | ~ClLifecycleNode () |
| void | onInitialize () override |
| void | changeState (uint8_t state) |
| void | configure () |
| void | activate () |
| void | deactivate () |
| void | cleanup () |
| void | shutdown () |
| void | destroy () |
| virtual void | onTransitionEvent (const lifecycle_msgs::msg::TransitionEvent::SharedPtr msg) |
| template<typename TOrthogonal , typename TSourceObject > | |
| void | onOrthogonalAllocation () |
 Public Member Functions inherited from smacc2::ISmaccClient Public Member Functions inherited from smacc2::ISmaccClient | |
| ISmaccClient () | |
| virtual | ~ISmaccClient () |
| virtual std::string | getName () const |
| template<typename TComponent > | |
| TComponent * | getComponent () |
| template<typename TComponent > | |
| TComponent * | getComponent (std::string name) |
| template<typename TComponent > | |
| TComponent * | getComponent (int index) |
| virtual smacc2::introspection::TypeInfo::Ptr | getType () |
| ISmaccStateMachine * | getStateMachine () |
| template<typename TSmaccSignal , typename T > | |
| void | connectSignal (TSmaccSignal &signal, void(T::*callback)(), T *object) |
| template<typename SmaccClientType > | |
| void | requiresClient (SmaccClientType *&storage) |
| void | getComponents (std::vector< std::shared_ptr< ISmaccComponent > > &components) |
| const std::vector< std::shared_ptr< ISmaccComponent > > & | iterateComponents () const |
| template<typename EventType > | |
| void | postEvent (const EventType &ev) |
| template<typename EventType > | |
| void | postEvent () |
Public Attributes | |
| boost::signals2::signal< void(const lifecycle_msgs::msg::TransitionEvent::SharedPtr)> | onTransitionEventSignal |
| boost::signals2::signal< void()> | onTransitionCreate_ |
| boost::signals2::signal< void()> | onTransitionConfigure_ |
| boost::signals2::signal< void()> | onTransitionCleanup_ |
| boost::signals2::signal< void()> | onTransitionActivate_ |
| boost::signals2::signal< void()> | onTransitionDeactivate_ |
| boost::signals2::signal< void()> | onTransitionUnconfiguredShutdown_ |
| boost::signals2::signal< void()> | onTransitionInactiveShutdown_ |
| boost::signals2::signal< void()> | onTransitionActiveShutdown_ |
| boost::signals2::signal< void()> | onTransitionDestroy_ |
| boost::signals2::signal< void()> | onTransitionOnConfigureSuccess_ |
| boost::signals2::signal< void()> | onTransitionOnConfigureFailure_ |
| boost::signals2::signal< void()> | onTransitionOnConfigureError_ |
| boost::signals2::signal< void()> | onTransitionOnActivateSuccess_ |
| boost::signals2::signal< void()> | onTransitionOnActivateFailure_ |
| boost::signals2::signal< void()> | onTransitionOnActivateError_ |
| boost::signals2::signal< void()> | onTransitionOnDeactivateSuccess_ |
| boost::signals2::signal< void()> | onTransitionOnDeactivateFailure_ |
| boost::signals2::signal< void()> | onTransitionOnDeactivateError_ |
| boost::signals2::signal< void()> | onTransitionOnCleanupSuccess_ |
| boost::signals2::signal< void()> | onTransitionOnCleanupFailure_ |
| boost::signals2::signal< void()> | onTransitionOnCleanupError_ |
| boost::signals2::signal< void()> | onTransitionOnShutdownSuccess_ |
| boost::signals2::signal< void()> | onTransitionOnShutdownFailure_ |
| boost::signals2::signal< void()> | onTransitionOnShutdownError_ |
| boost::signals2::signal< void()> | onTransitionOnActiveShutdownSuccess_ |
| boost::signals2::signal< void()> | onTransitionOnActiveShutdownFailure_ |
| boost::signals2::signal< void()> | onTransitionOnActiveShutdownError_ |
| boost::signals2::signal< void()> | onTransitionOnErrorSuccess_ |
| boost::signals2::signal< void()> | onTransitionOnErrorFailure_ |
| boost::signals2::signal< void()> | onTransitionOnErrorError_ |
Private Attributes | |
| rclcpp::Client< lifecycle_msgs::srv::GetState >::SharedPtr | client_get_state_ |
| rclcpp::Client< lifecycle_msgs::srv::ChangeState >::SharedPtr | client_change_state_ |
| rclcpp::Subscription< lifecycle_msgs::msg::TransitionEvent >::SharedPtr | subscription_transition_event_ |
| std::string | nodeName_ |
| const std::string | node_get_state_topic = "/get_state" |
| const std::string | node_change_state_topic = "/change_state" |
| const std::string | node_transition_event_topic = "/transition_event" |
| lifecycle_msgs::msg::TransitionEvent::SharedPtr | lastTransitionEvent_ |
| std::function< void()> | postOnTransitionCreate_ |
| std::function< void()> | postOnTransitionConfigure_ |
| std::function< void()> | postOnTransitionCleanup_ |
| std::function< void()> | postOnTransitionActivate_ |
| std::function< void()> | postOnTransitionDeactivate_ |
| std::function< void()> | postOnTransitionUnconfiguredShutdown_ |
| std::function< void()> | postOnTransitionInactiveShutdown_ |
| std::function< void()> | postOnTransitionActiveShutdown_ |
| std::function< void()> | postOnTransitionDestroy_ |
| std::function< void()> | postOnTransitionOnConfigureSuccess_ |
| std::function< void()> | postOnTransitionOnConfigureFailure_ |
| std::function< void()> | postOnTransitionOnConfigureError_ |
| std::function< void()> | postOnTransitionOnActivateSuccess_ |
| std::function< void()> | postOnTransitionOnActivateFailure_ |
| std::function< void()> | postOnTransitionOnActivateError_ |
| std::function< void()> | postOnTransitionOnDeactivateSuccess_ |
| std::function< void()> | postOnTransitionOnDeactivateFailure_ |
| std::function< void()> | postOnTransitionOnDeactivateError_ |
| std::function< void()> | postOnTransitionOnCleanupSuccess_ |
| std::function< void()> | postOnTransitionOnCleanupFailure_ |
| std::function< void()> | postOnTransitionOnCleanupError_ |
| std::function< void()> | postOnTransitionOnShutdownSuccess_ |
| std::function< void()> | postOnTransitionOnShutdownFailure_ |
| std::function< void()> | postOnTransitionOnShutdownError_ |
| std::function< void()> | postOnTransitionOnErrorSuccess_ |
| std::function< void()> | postOnTransitionOnErrorFailure_ |
| std::function< void()> | postOnTransitionOnErrorError_ |
Additional Inherited Members | |
| Protected Member Functions inherited from smacc2::ISmaccClient | |
| template<typename TOrthogonal , typename TClient > | |
| void | onComponentInitialization () |
| template<typename TOrthogonal , typename TSourceObject > | |
| void | onOrthogonalAllocation () |
| template<typename TOrthogonal , typename TSourceObject > | |
| void | onStateOrthogonalAllocation () |
| template<typename SmaccComponentType , typename TOrthogonal , typename TClient , typename... TArgs> | |
| SmaccComponentType * | createComponent (TArgs... targs) |
| template<typename SmaccComponentType , typename TOrthogonal , typename TClient , typename... TArgs> | |
| SmaccComponentType * | createNamedComponent (std::string name, TArgs... targs) |
| rclcpp::Node::SharedPtr | getNode () |
| rclcpp::Logger | getLogger () |
| Protected Attributes inherited from smacc2::ISmaccClient | |
| std::map< ComponentKey, std::shared_ptr< smacc2::ISmaccComponent > > | components_ |
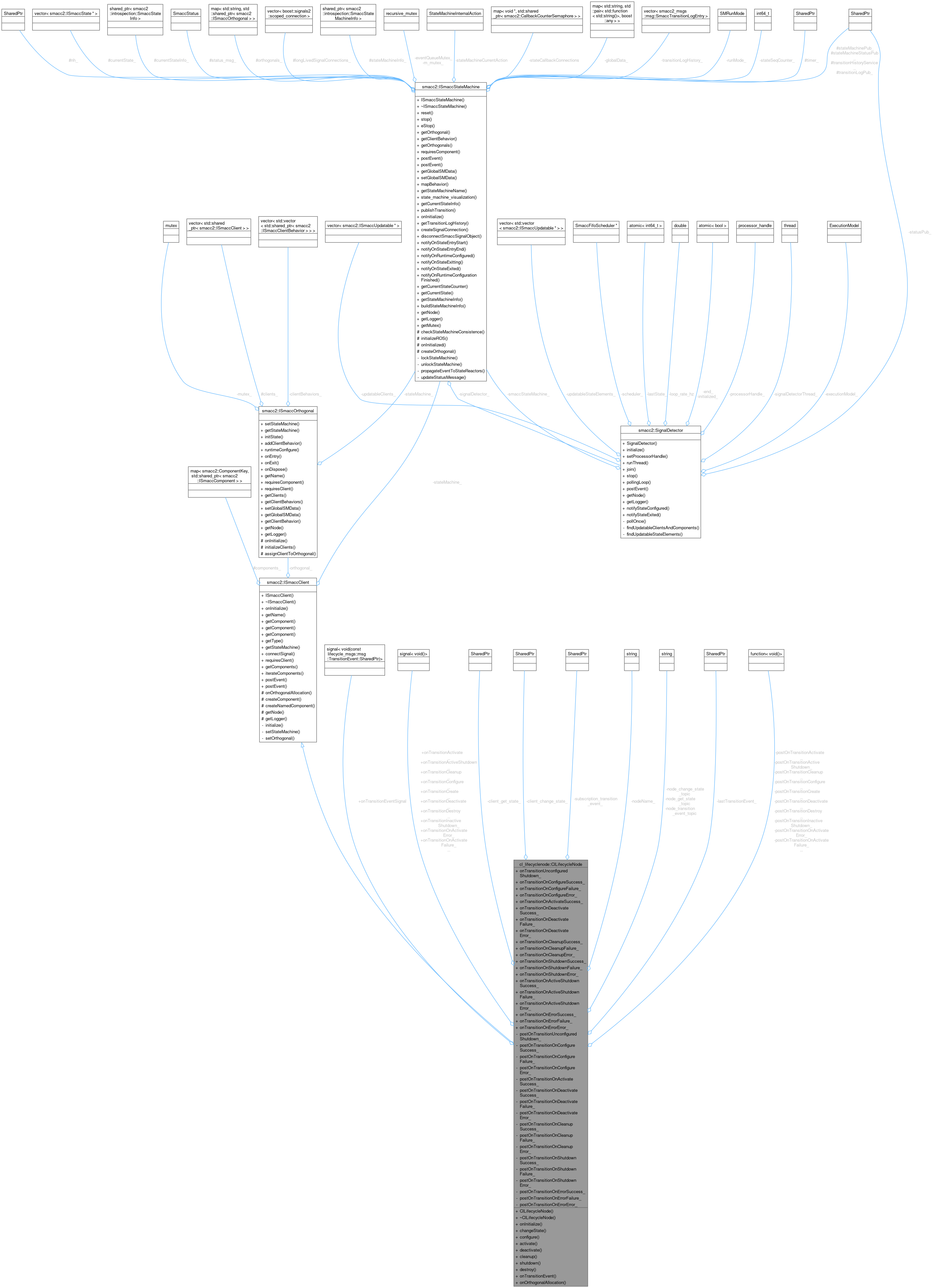
Detailed Description
Definition at line 192 of file lifecyclenode_client.hpp.
Constructor & Destructor Documentation
◆ ClLifecycleNode()
| cl_lifecyclenode::ClLifecycleNode::ClLifecycleNode | ( | std::string | nodeName | ) |
Definition at line 25 of file lifecyclenode_client.cpp.
◆ ~ClLifecycleNode()
|
virtual |
Definition at line 27 of file lifecyclenode_client.cpp.
Member Function Documentation
◆ activate()
| void cl_lifecyclenode::ClLifecycleNode::activate | ( | ) |
Definition at line 50 of file lifecyclenode_client.cpp.
References changeState().
Referenced by cl_lifecyclenode::CbActivate::onEntry().


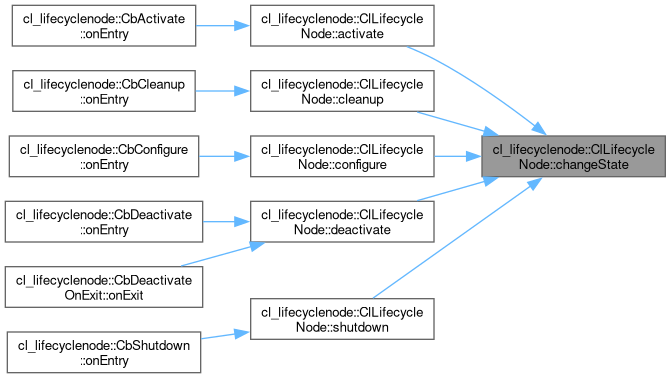
◆ changeState()
| void cl_lifecyclenode::ClLifecycleNode::changeState | ( | uint8_t | state | ) |
Definition at line 42 of file lifecyclenode_client.cpp.
References client_change_state_.
Referenced by activate(), cleanup(), configure(), deactivate(), and shutdown().
◆ cleanup()
| void cl_lifecyclenode::ClLifecycleNode::cleanup | ( | ) |
Definition at line 65 of file lifecyclenode_client.cpp.
References changeState().
Referenced by cl_lifecyclenode::CbCleanup::onEntry().


◆ configure()
| void cl_lifecyclenode::ClLifecycleNode::configure | ( | ) |
Definition at line 60 of file lifecyclenode_client.cpp.
References changeState().
Referenced by cl_lifecyclenode::CbConfigure::onEntry().


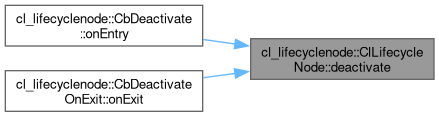
◆ deactivate()
| void cl_lifecyclenode::ClLifecycleNode::deactivate | ( | ) |
Definition at line 55 of file lifecyclenode_client.cpp.
References changeState().
Referenced by cl_lifecyclenode::CbDeactivate::onEntry(), and cl_lifecyclenode::CbDeactivateOnExit::onExit().

◆ destroy()
| void cl_lifecyclenode::ClLifecycleNode::destroy | ( | ) |

◆ onInitialize()
|
overridevirtual |
Reimplemented from smacc2::ISmaccClient.
Definition at line 29 of file lifecyclenode_client.cpp.
References client_change_state_, client_get_state_, smacc2::ISmaccClient::getNode(), node_change_state_topic, node_get_state_topic, node_transition_event_topic, nodeName_, onTransitionEvent(), and subscription_transition_event_.

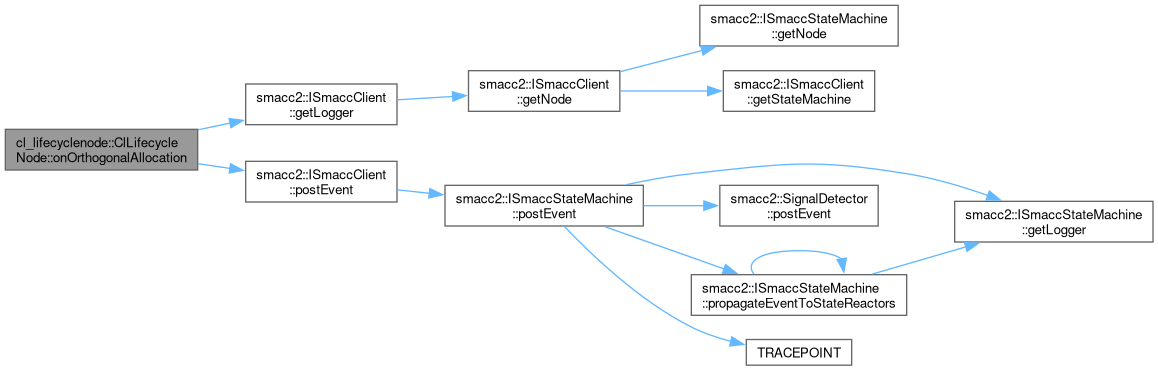
◆ onOrthogonalAllocation()
|
inline |
Definition at line 269 of file lifecyclenode_client.hpp.
References smacc2::ISmaccClient::getLogger(), onTransitionActivate_, onTransitionActiveShutdown_, onTransitionCleanup_, onTransitionConfigure_, onTransitionCreate_, onTransitionDeactivate_, onTransitionDestroy_, onTransitionInactiveShutdown_, onTransitionOnActivateError_, onTransitionOnActivateFailure_, onTransitionOnActivateSuccess_, onTransitionOnCleanupError_, onTransitionOnCleanupFailure_, onTransitionOnCleanupSuccess_, onTransitionOnConfigureError_, onTransitionOnConfigureFailure_, onTransitionOnConfigureSuccess_, onTransitionOnDeactivateError_, onTransitionOnDeactivateFailure_, onTransitionOnDeactivateSuccess_, onTransitionOnErrorError_, onTransitionOnErrorFailure_, onTransitionOnErrorSuccess_, onTransitionOnShutdownError_, onTransitionOnShutdownFailure_, onTransitionOnShutdownSuccess_, onTransitionUnconfiguredShutdown_, smacc2::ISmaccClient::postEvent(), postOnTransitionActivate_, postOnTransitionActiveShutdown_, postOnTransitionCleanup_, postOnTransitionConfigure_, postOnTransitionCreate_, postOnTransitionDeactivate_, postOnTransitionDestroy_, postOnTransitionInactiveShutdown_, postOnTransitionOnActivateError_, postOnTransitionOnActivateFailure_, postOnTransitionOnActivateSuccess_, postOnTransitionOnCleanupError_, postOnTransitionOnCleanupFailure_, postOnTransitionOnCleanupSuccess_, postOnTransitionOnConfigureError_, postOnTransitionOnConfigureFailure_, postOnTransitionOnConfigureSuccess_, postOnTransitionOnDeactivateError_, postOnTransitionOnDeactivateFailure_, postOnTransitionOnDeactivateSuccess_, postOnTransitionOnErrorError_, postOnTransitionOnErrorFailure_, postOnTransitionOnErrorSuccess_, postOnTransitionOnShutdownError_, postOnTransitionOnShutdownFailure_, postOnTransitionOnShutdownSuccess_, and postOnTransitionUnconfiguredShutdown_.
◆ onTransitionEvent()
|
virtual |
Definition at line 75 of file lifecyclenode_client.cpp.
References smacc2::ISmaccClient::getNode(), lastTransitionEvent_, postOnTransitionActivate_, postOnTransitionActiveShutdown_, postOnTransitionCleanup_, postOnTransitionConfigure_, postOnTransitionDeactivate_, postOnTransitionDestroy_, postOnTransitionInactiveShutdown_, postOnTransitionOnActivateError_, postOnTransitionOnActivateFailure_, postOnTransitionOnActivateSuccess_, postOnTransitionOnCleanupError_, postOnTransitionOnCleanupSuccess_, postOnTransitionOnConfigureError_, postOnTransitionOnConfigureFailure_, postOnTransitionOnConfigureSuccess_, postOnTransitionOnDeactivateError_, postOnTransitionOnDeactivateSuccess_, postOnTransitionOnErrorFailure_, postOnTransitionOnErrorSuccess_, postOnTransitionOnShutdownError_, postOnTransitionOnShutdownSuccess_, and postOnTransitionUnconfiguredShutdown_.
Referenced by onInitialize().


◆ shutdown()
| void cl_lifecyclenode::ClLifecycleNode::shutdown | ( | ) |
Definition at line 70 of file lifecyclenode_client.cpp.
References changeState().
Referenced by cl_lifecyclenode::CbShutdown::onEntry().


Member Data Documentation
◆ client_change_state_
|
private |
Definition at line 439 of file lifecyclenode_client.hpp.
Referenced by changeState(), and onInitialize().
◆ client_get_state_
|
private |
Definition at line 438 of file lifecyclenode_client.hpp.
Referenced by onInitialize().
◆ lastTransitionEvent_
|
private |
Definition at line 449 of file lifecyclenode_client.hpp.
Referenced by onTransitionEvent().
◆ node_change_state_topic
|
private |
Definition at line 446 of file lifecyclenode_client.hpp.
Referenced by onInitialize().
◆ node_get_state_topic
|
private |
Definition at line 445 of file lifecyclenode_client.hpp.
Referenced by onInitialize().
◆ node_transition_event_topic
|
private |
Definition at line 447 of file lifecyclenode_client.hpp.
Referenced by onInitialize().
◆ nodeName_
|
private |
Definition at line 444 of file lifecyclenode_client.hpp.
Referenced by onInitialize().
◆ onTransitionActivate_
| boost::signals2::signal<void()> cl_lifecyclenode::ClLifecycleNode::onTransitionActivate_ |
Definition at line 231 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation().
◆ onTransitionActiveShutdown_
| boost::signals2::signal<void()> cl_lifecyclenode::ClLifecycleNode::onTransitionActiveShutdown_ |
Definition at line 236 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation().
◆ onTransitionCleanup_
| boost::signals2::signal<void()> cl_lifecyclenode::ClLifecycleNode::onTransitionCleanup_ |
Definition at line 230 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation().
◆ onTransitionConfigure_
| boost::signals2::signal<void()> cl_lifecyclenode::ClLifecycleNode::onTransitionConfigure_ |
Definition at line 229 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation().
◆ onTransitionCreate_
| boost::signals2::signal<void()> cl_lifecyclenode::ClLifecycleNode::onTransitionCreate_ |
Definition at line 228 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation().
◆ onTransitionDeactivate_
| boost::signals2::signal<void()> cl_lifecyclenode::ClLifecycleNode::onTransitionDeactivate_ |
Definition at line 232 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation().
◆ onTransitionDestroy_
| boost::signals2::signal<void()> cl_lifecyclenode::ClLifecycleNode::onTransitionDestroy_ |
Definition at line 238 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation().
◆ onTransitionEventSignal
| boost::signals2::signal<void(const lifecycle_msgs::msg::TransitionEvent::SharedPtr)> cl_lifecyclenode::ClLifecycleNode::onTransitionEventSignal |
Definition at line 226 of file lifecyclenode_client.hpp.
◆ onTransitionInactiveShutdown_
| boost::signals2::signal<void()> cl_lifecyclenode::ClLifecycleNode::onTransitionInactiveShutdown_ |
Definition at line 235 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation().
◆ onTransitionOnActivateError_
| boost::signals2::signal<void()> cl_lifecyclenode::ClLifecycleNode::onTransitionOnActivateError_ |
Definition at line 246 of file lifecyclenode_client.hpp.
Referenced by cl_lifecyclenode::CbActivate::onOrthogonalAllocation(), and onOrthogonalAllocation().
◆ onTransitionOnActivateFailure_
| boost::signals2::signal<void()> cl_lifecyclenode::ClLifecycleNode::onTransitionOnActivateFailure_ |
Definition at line 245 of file lifecyclenode_client.hpp.
Referenced by cl_lifecyclenode::CbActivate::onOrthogonalAllocation(), and onOrthogonalAllocation().
◆ onTransitionOnActivateSuccess_
| boost::signals2::signal<void()> cl_lifecyclenode::ClLifecycleNode::onTransitionOnActivateSuccess_ |
Definition at line 244 of file lifecyclenode_client.hpp.
Referenced by cl_lifecyclenode::CbActivate::onOrthogonalAllocation(), and onOrthogonalAllocation().
◆ onTransitionOnActiveShutdownError_
| boost::signals2::signal<void()> cl_lifecyclenode::ClLifecycleNode::onTransitionOnActiveShutdownError_ |
Definition at line 262 of file lifecyclenode_client.hpp.
◆ onTransitionOnActiveShutdownFailure_
| boost::signals2::signal<void()> cl_lifecyclenode::ClLifecycleNode::onTransitionOnActiveShutdownFailure_ |
Definition at line 261 of file lifecyclenode_client.hpp.
◆ onTransitionOnActiveShutdownSuccess_
| boost::signals2::signal<void()> cl_lifecyclenode::ClLifecycleNode::onTransitionOnActiveShutdownSuccess_ |
Definition at line 260 of file lifecyclenode_client.hpp.
◆ onTransitionOnCleanupError_
| boost::signals2::signal<void()> cl_lifecyclenode::ClLifecycleNode::onTransitionOnCleanupError_ |
Definition at line 254 of file lifecyclenode_client.hpp.
Referenced by cl_lifecyclenode::CbCleanup::onOrthogonalAllocation(), and onOrthogonalAllocation().
◆ onTransitionOnCleanupFailure_
| boost::signals2::signal<void()> cl_lifecyclenode::ClLifecycleNode::onTransitionOnCleanupFailure_ |
Definition at line 253 of file lifecyclenode_client.hpp.
Referenced by cl_lifecyclenode::CbCleanup::onOrthogonalAllocation(), and onOrthogonalAllocation().
◆ onTransitionOnCleanupSuccess_
| boost::signals2::signal<void()> cl_lifecyclenode::ClLifecycleNode::onTransitionOnCleanupSuccess_ |
Definition at line 252 of file lifecyclenode_client.hpp.
Referenced by cl_lifecyclenode::CbCleanup::onOrthogonalAllocation(), and onOrthogonalAllocation().
◆ onTransitionOnConfigureError_
| boost::signals2::signal<void()> cl_lifecyclenode::ClLifecycleNode::onTransitionOnConfigureError_ |
Definition at line 242 of file lifecyclenode_client.hpp.
Referenced by cl_lifecyclenode::CbConfigure::onOrthogonalAllocation(), and onOrthogonalAllocation().
◆ onTransitionOnConfigureFailure_
| boost::signals2::signal<void()> cl_lifecyclenode::ClLifecycleNode::onTransitionOnConfigureFailure_ |
Definition at line 241 of file lifecyclenode_client.hpp.
Referenced by cl_lifecyclenode::CbConfigure::onOrthogonalAllocation(), and onOrthogonalAllocation().
◆ onTransitionOnConfigureSuccess_
| boost::signals2::signal<void()> cl_lifecyclenode::ClLifecycleNode::onTransitionOnConfigureSuccess_ |
Definition at line 240 of file lifecyclenode_client.hpp.
Referenced by cl_lifecyclenode::CbConfigure::onOrthogonalAllocation(), and onOrthogonalAllocation().
◆ onTransitionOnDeactivateError_
| boost::signals2::signal<void()> cl_lifecyclenode::ClLifecycleNode::onTransitionOnDeactivateError_ |
Definition at line 250 of file lifecyclenode_client.hpp.
Referenced by cl_lifecyclenode::CbDeactivate::onOrthogonalAllocation(), cl_lifecyclenode::CbDeactivateOnExit::onOrthogonalAllocation(), and onOrthogonalAllocation().
◆ onTransitionOnDeactivateFailure_
| boost::signals2::signal<void()> cl_lifecyclenode::ClLifecycleNode::onTransitionOnDeactivateFailure_ |
Definition at line 249 of file lifecyclenode_client.hpp.
Referenced by cl_lifecyclenode::CbDeactivate::onOrthogonalAllocation(), cl_lifecyclenode::CbDeactivateOnExit::onOrthogonalAllocation(), and onOrthogonalAllocation().
◆ onTransitionOnDeactivateSuccess_
| boost::signals2::signal<void()> cl_lifecyclenode::ClLifecycleNode::onTransitionOnDeactivateSuccess_ |
Definition at line 248 of file lifecyclenode_client.hpp.
Referenced by cl_lifecyclenode::CbDeactivate::onOrthogonalAllocation(), cl_lifecyclenode::CbDeactivateOnExit::onOrthogonalAllocation(), and onOrthogonalAllocation().
◆ onTransitionOnErrorError_
| boost::signals2::signal<void()> cl_lifecyclenode::ClLifecycleNode::onTransitionOnErrorError_ |
Definition at line 266 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation().
◆ onTransitionOnErrorFailure_
| boost::signals2::signal<void()> cl_lifecyclenode::ClLifecycleNode::onTransitionOnErrorFailure_ |
Definition at line 265 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation().
◆ onTransitionOnErrorSuccess_
| boost::signals2::signal<void()> cl_lifecyclenode::ClLifecycleNode::onTransitionOnErrorSuccess_ |
Definition at line 264 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation().
◆ onTransitionOnShutdownError_
| boost::signals2::signal<void()> cl_lifecyclenode::ClLifecycleNode::onTransitionOnShutdownError_ |
Definition at line 258 of file lifecyclenode_client.hpp.
Referenced by cl_lifecyclenode::CbShutdown::onOrthogonalAllocation(), and onOrthogonalAllocation().
◆ onTransitionOnShutdownFailure_
| boost::signals2::signal<void()> cl_lifecyclenode::ClLifecycleNode::onTransitionOnShutdownFailure_ |
Definition at line 257 of file lifecyclenode_client.hpp.
Referenced by cl_lifecyclenode::CbShutdown::onOrthogonalAllocation(), and onOrthogonalAllocation().
◆ onTransitionOnShutdownSuccess_
| boost::signals2::signal<void()> cl_lifecyclenode::ClLifecycleNode::onTransitionOnShutdownSuccess_ |
Definition at line 256 of file lifecyclenode_client.hpp.
Referenced by cl_lifecyclenode::CbShutdown::onOrthogonalAllocation(), and onOrthogonalAllocation().
◆ onTransitionUnconfiguredShutdown_
| boost::signals2::signal<void()> cl_lifecyclenode::ClLifecycleNode::onTransitionUnconfiguredShutdown_ |
Definition at line 234 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation().
◆ postOnTransitionActivate_
|
private |
Definition at line 454 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation(), and onTransitionEvent().
◆ postOnTransitionActiveShutdown_
|
private |
Definition at line 458 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation(), and onTransitionEvent().
◆ postOnTransitionCleanup_
|
private |
Definition at line 453 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation(), and onTransitionEvent().
◆ postOnTransitionConfigure_
|
private |
Definition at line 452 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation(), and onTransitionEvent().
◆ postOnTransitionCreate_
|
private |
Definition at line 451 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation().
◆ postOnTransitionDeactivate_
|
private |
Definition at line 455 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation(), and onTransitionEvent().
◆ postOnTransitionDestroy_
|
private |
Definition at line 459 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation(), and onTransitionEvent().
◆ postOnTransitionInactiveShutdown_
|
private |
Definition at line 457 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation(), and onTransitionEvent().
◆ postOnTransitionOnActivateError_
|
private |
Definition at line 467 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation(), and onTransitionEvent().
◆ postOnTransitionOnActivateFailure_
|
private |
Definition at line 466 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation(), and onTransitionEvent().
◆ postOnTransitionOnActivateSuccess_
|
private |
Definition at line 465 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation(), and onTransitionEvent().
◆ postOnTransitionOnCleanupError_
|
private |
Definition at line 475 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation(), and onTransitionEvent().
◆ postOnTransitionOnCleanupFailure_
|
private |
Definition at line 474 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation().
◆ postOnTransitionOnCleanupSuccess_
|
private |
Definition at line 473 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation(), and onTransitionEvent().
◆ postOnTransitionOnConfigureError_
|
private |
Definition at line 463 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation(), and onTransitionEvent().
◆ postOnTransitionOnConfigureFailure_
|
private |
Definition at line 462 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation(), and onTransitionEvent().
◆ postOnTransitionOnConfigureSuccess_
|
private |
Definition at line 461 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation(), and onTransitionEvent().
◆ postOnTransitionOnDeactivateError_
|
private |
Definition at line 471 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation(), and onTransitionEvent().
◆ postOnTransitionOnDeactivateFailure_
|
private |
Definition at line 470 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation().
◆ postOnTransitionOnDeactivateSuccess_
|
private |
Definition at line 469 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation(), and onTransitionEvent().
◆ postOnTransitionOnErrorError_
|
private |
Definition at line 483 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation().
◆ postOnTransitionOnErrorFailure_
|
private |
Definition at line 482 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation(), and onTransitionEvent().
◆ postOnTransitionOnErrorSuccess_
|
private |
Definition at line 481 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation(), and onTransitionEvent().
◆ postOnTransitionOnShutdownError_
|
private |
Definition at line 479 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation(), and onTransitionEvent().
◆ postOnTransitionOnShutdownFailure_
|
private |
Definition at line 478 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation().
◆ postOnTransitionOnShutdownSuccess_
|
private |
Definition at line 477 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation(), and onTransitionEvent().
◆ postOnTransitionUnconfiguredShutdown_
|
private |
Definition at line 456 of file lifecyclenode_client.hpp.
Referenced by onOrthogonalAllocation(), and onTransitionEvent().
◆ subscription_transition_event_
|
private |
Definition at line 442 of file lifecyclenode_client.hpp.
Referenced by onInitialize().
The documentation for this class was generated from the following files:
- smacc2_client_library/lifecyclenode_client/include/lifecyclenode_client/lifecyclenode_client.hpp
- smacc2_client_library/lifecyclenode_client/src/lifecyclenode_client/lifecyclenode_client.cpp
Generated by