#include <smacc_action_client_base.hpp>

Public Types | |
| typedef rclcpp_action::Client< ActionType > | ActionClient |
| using | Goal = typename ActionClient::Goal |
| using | Feedback = typename ActionClient::Feedback |
| using | GoalHandle = rclcpp_action::ClientGoalHandle< ActionType > |
| typedef GoalHandle::WrappedResult | WrappedResult |
| using | SendGoalOptions = typename ActionClient::SendGoalOptions |
| using | GoalResponseCallback = std::function< void(std::shared_future< typename GoalHandle::SharedPtr >)> |
| using | FeedbackCallback = typename GoalHandle::FeedbackCallback |
| using | ResultCallback = typename GoalHandle::ResultCallback |
| using | CancelRequest = typename ActionType::Impl::CancelGoalService::Request |
| using | CancelResponse = typename ActionType::Impl::CancelGoalService::Response |
| using | CancelCallback = std::function< void(typename CancelResponse::SharedPtr)> |
Public Member Functions | |
| SmaccActionClientBase (std::string actionServerName) | |
| SmaccActionClientBase () | |
| virtual | ~SmaccActionClientBase () |
| virtual std::shared_ptr< rclcpp_action::ClientBase > | getClientBase () override |
| void | onInitialize () override |
| template<typename EvType > | |
| void | postResultEvent (WrappedResult &) |
| template<typename TOrthogonal , typename TSourceObject > | |
| void | onOrthogonalAllocation () |
| template<typename T > | |
| boost::signals2::connection | onSucceeded (void(T::*callback)(WrappedResult &), T *object) |
| template<typename T > | |
| boost::signals2::connection | onSucceeded (std::function< void(WrappedResult &)> callback) |
| template<typename T > | |
| boost::signals2::connection | onAborted (void(T::*callback)(WrappedResult &), T *object) |
| template<typename T > | |
| boost::signals2::connection | onAborted (std::function< void(WrappedResult &)> callback) |
| template<typename T > | |
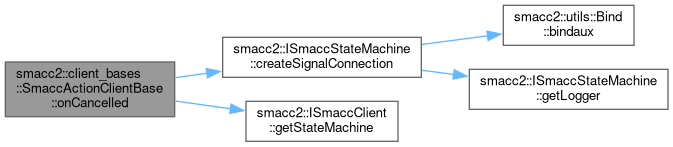
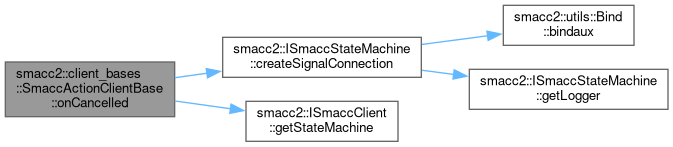
| boost::signals2::connection | onCancelled (void(T::*callback)(WrappedResult &), T *object) |
| template<typename T > | |
| boost::signals2::connection | onCancelled (std::function< void(WrappedResult &)> callback) |
| virtual bool | cancelGoal () override |
| std::shared_future< typename GoalHandle::SharedPtr > | sendGoal (Goal &goal) |
 Public Member Functions inherited from smacc2::client_bases::ISmaccActionClient Public Member Functions inherited from smacc2::client_bases::ISmaccActionClient | |
| ISmaccActionClient () | |
| virtual | ~ISmaccActionClient () |
| std::string | getNamespace () const |
| virtual bool | cancelGoal ()=0 |
| virtual std::shared_ptr< rclcpp_action::ClientBase > | getClientBase ()=0 |
| virtual std::string | getName () const |
| Public Member Functions inherited from smacc2::ISmaccClient | |
| ISmaccClient () | |
| virtual | ~ISmaccClient () |
| virtual void | onInitialize () |
| virtual std::string | getName () const |
| template<typename TComponent > | |
| TComponent * | getComponent () |
| template<typename TComponent > | |
| TComponent * | getComponent (std::string name) |
| template<typename TComponent > | |
| TComponent * | getComponent (int index) |
| virtual smacc2::introspection::TypeInfo::Ptr | getType () |
| ISmaccStateMachine * | getStateMachine () |
| template<typename TSmaccSignal , typename T > | |
| void | connectSignal (TSmaccSignal &signal, void(T::*callback)(), T *object) |
| template<typename SmaccClientType > | |
| void | requiresClient (SmaccClientType *&storage) |
| void | getComponents (std::vector< std::shared_ptr< ISmaccComponent > > &components) |
| template<typename EventType > | |
| void | postEvent (const EventType &ev) |
| template<typename EventType > | |
| void | postEvent () |
Static Public Member Functions | |
| static std::string | getEventLabel () |
Public Attributes | |
| std::string | action_endpoint_ |
| std::optional< std::shared_future< typename GoalHandle::SharedPtr > > | lastRequest_ |
| GoalHandle::SharedPtr | goalHandle_ |
| smacc2::SmaccSignal< void(const WrappedResult &)> | onSucceeded_ |
| smacc2::SmaccSignal< void(const WrappedResult &)> | onAborted_ |
| smacc2::SmaccSignal< void(const WrappedResult &)> | onCancelled_ |
| std::function< void(WrappedResult)> | postSuccessEvent |
| std::function< void(WrappedResult)> | postAbortedEvent |
| std::function< void(WrappedResult)> | postCancelledEvent |
| std::function< void(const Feedback &)> | postFeedbackEvent |
| ResultCallback | done_cb |
| FeedbackCallback | feedback_cb |
Protected Member Functions | |
| void | onFeedback (typename GoalHandle::SharedPtr, const std::shared_ptr< const Feedback > feedback_msg) |
| void | onResult (const WrappedResult &result_msg) |
| Protected Member Functions inherited from smacc2::ISmaccClient | |
| template<typename TOrthogonal , typename TSourceObject > | |
| void | onOrthogonalAllocation () |
| template<typename SmaccComponentType , typename TOrthogonal , typename TClient , typename... TArgs> | |
| SmaccComponentType * | createComponent (TArgs... targs) |
| template<typename SmaccComponentType , typename TOrthogonal , typename TClient , typename... TArgs> | |
| SmaccComponentType * | createNamedComponent (std::string name, TArgs... targs) |
| rclcpp::Node::SharedPtr | getNode () |
| rclcpp::Logger | getLogger () |
Protected Attributes | |
| ActionClient::SharedPtr | client_ |
| Protected Attributes inherited from smacc2::client_bases::ISmaccActionClient | |
| std::string | name_ |
| Protected Attributes inherited from smacc2::ISmaccClient | |
| std::map< ComponentKey, std::shared_ptr< smacc2::ISmaccComponent > > | components_ |
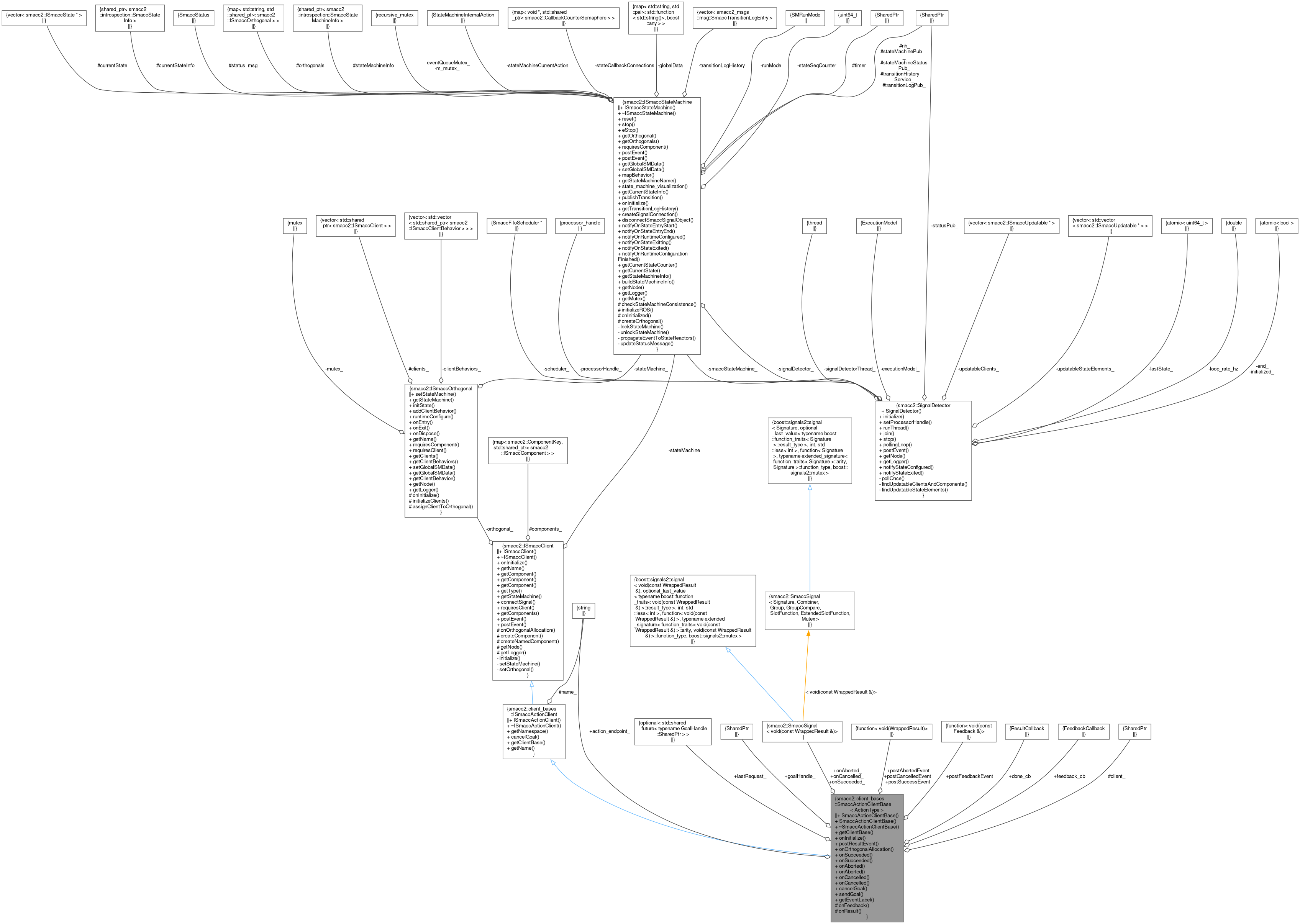
Detailed Description
class smacc2::client_bases::SmaccActionClientBase< ActionType >
Definition at line 37 of file smacc_action_client_base.hpp.
Member Typedef Documentation
◆ ActionClient
| typedef rclcpp_action::Client<ActionType> smacc2::client_bases::SmaccActionClientBase< ActionType >::ActionClient |
Definition at line 42 of file smacc_action_client_base.hpp.
◆ CancelCallback
| using smacc2::client_bases::SmaccActionClientBase< ActionType >::CancelCallback = std::function<void(typename CancelResponse::SharedPtr)> |
Definition at line 61 of file smacc_action_client_base.hpp.
◆ CancelRequest
| using smacc2::client_bases::SmaccActionClientBase< ActionType >::CancelRequest = typename ActionType::Impl::CancelGoalService::Request |
Definition at line 59 of file smacc_action_client_base.hpp.
◆ CancelResponse
| using smacc2::client_bases::SmaccActionClientBase< ActionType >::CancelResponse = typename ActionType::Impl::CancelGoalService::Response |
Definition at line 60 of file smacc_action_client_base.hpp.
◆ Feedback
| using smacc2::client_bases::SmaccActionClientBase< ActionType >::Feedback = typename ActionClient::Feedback |
Definition at line 50 of file smacc_action_client_base.hpp.
◆ FeedbackCallback
| using smacc2::client_bases::SmaccActionClientBase< ActionType >::FeedbackCallback = typename GoalHandle::FeedbackCallback |
Definition at line 57 of file smacc_action_client_base.hpp.
◆ Goal
| using smacc2::client_bases::SmaccActionClientBase< ActionType >::Goal = typename ActionClient::Goal |
Definition at line 49 of file smacc_action_client_base.hpp.
◆ GoalHandle
| using smacc2::client_bases::SmaccActionClientBase< ActionType >::GoalHandle = rclcpp_action::ClientGoalHandle<ActionType> |
Definition at line 51 of file smacc_action_client_base.hpp.
◆ GoalResponseCallback
| using smacc2::client_bases::SmaccActionClientBase< ActionType >::GoalResponseCallback = std::function<void(std::shared_future<typename GoalHandle::SharedPtr>)> |
Definition at line 55 of file smacc_action_client_base.hpp.
◆ ResultCallback
| using smacc2::client_bases::SmaccActionClientBase< ActionType >::ResultCallback = typename GoalHandle::ResultCallback |
Definition at line 58 of file smacc_action_client_base.hpp.
◆ SendGoalOptions
| using smacc2::client_bases::SmaccActionClientBase< ActionType >::SendGoalOptions = typename ActionClient::SendGoalOptions |
Definition at line 54 of file smacc_action_client_base.hpp.
◆ WrappedResult
| typedef GoalHandle::WrappedResult smacc2::client_bases::SmaccActionClientBase< ActionType >::WrappedResult |
Definition at line 52 of file smacc_action_client_base.hpp.
Constructor & Destructor Documentation
◆ SmaccActionClientBase() [1/2]
|
inline |
Definition at line 64 of file smacc_action_client_base.hpp.
References smacc2::client_bases::SmaccActionClientBase< ActionType >::action_endpoint_.
◆ SmaccActionClientBase() [2/2]
|
inline |
Definition at line 69 of file smacc_action_client_base.hpp.
References smacc2::client_bases::ISmaccActionClient::name_.
◆ ~SmaccActionClientBase()
|
inlinevirtual |
Definition at line 71 of file smacc_action_client_base.hpp.
Member Function Documentation
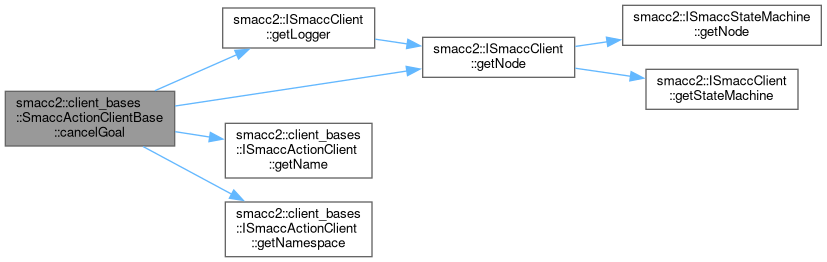
◆ cancelGoal()
|
inlineoverridevirtual |
Implements smacc2::client_bases::ISmaccActionClient.
Definition at line 212 of file smacc_action_client_base.hpp.
References smacc2::client_bases::SmaccActionClientBase< ActionType >::client_, smacc2::ISmaccClient::getLogger(), smacc2::client_bases::ISmaccActionClient::getName(), smacc2::client_bases::ISmaccActionClient::getNamespace(), smacc2::ISmaccClient::getNode(), and smacc2::client_bases::SmaccActionClientBase< ActionType >::lastRequest_.
◆ getClientBase()
|
inlineoverridevirtual |
Implements smacc2::client_bases::ISmaccActionClient.
Definition at line 73 of file smacc_action_client_base.hpp.
References smacc2::client_bases::SmaccActionClientBase< ActionType >::client_.
◆ getEventLabel()
|
inlinestatic |
Definition at line 85 of file smacc_action_client_base.hpp.
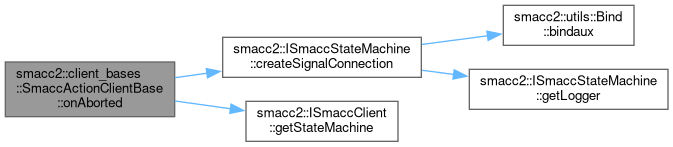
◆ onAborted() [1/2]
|
inline |
Definition at line 169 of file smacc_action_client_base.hpp.
References smacc2::ISmaccStateMachine::createSignalConnection(), and smacc2::ISmaccClient::getStateMachine().
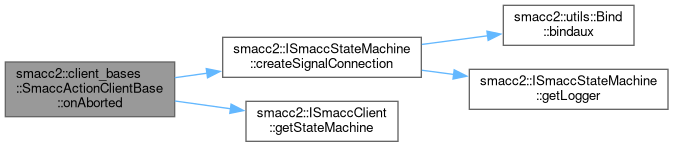
◆ onAborted() [2/2]
|
inline |
Definition at line 163 of file smacc_action_client_base.hpp.
References smacc2::ISmaccStateMachine::createSignalConnection(), and smacc2::ISmaccClient::getStateMachine().
◆ onCancelled() [1/2]
|
inline |
Definition at line 181 of file smacc_action_client_base.hpp.
References smacc2::ISmaccStateMachine::createSignalConnection(), and smacc2::ISmaccClient::getStateMachine().
◆ onCancelled() [2/2]
|
inline |
Definition at line 175 of file smacc_action_client_base.hpp.
References smacc2::ISmaccStateMachine::createSignalConnection(), and smacc2::ISmaccClient::getStateMachine().
◆ onFeedback()
|
inlineprotected |
Definition at line 341 of file smacc_action_client_base.hpp.
References smacc2::client_bases::SmaccActionClientBase< ActionType >::postFeedbackEvent.
Referenced by smacc2::client_bases::SmaccActionClientBase< ActionType >::onOrthogonalAllocation().

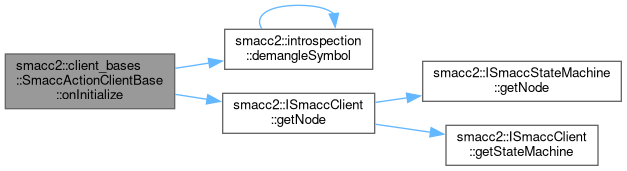
◆ onInitialize()
|
inlineoverridevirtual |
Reimplemented from smacc2::ISmaccClient.
Definition at line 75 of file smacc_action_client_base.hpp.
References smacc2::client_bases::SmaccActionClientBase< ActionType >::action_endpoint_, smacc2::client_bases::SmaccActionClientBase< ActionType >::client_, smacc2::introspection::demangleSymbol(), smacc2::ISmaccClient::getNode(), and smacc2::client_bases::ISmaccActionClient::name_.
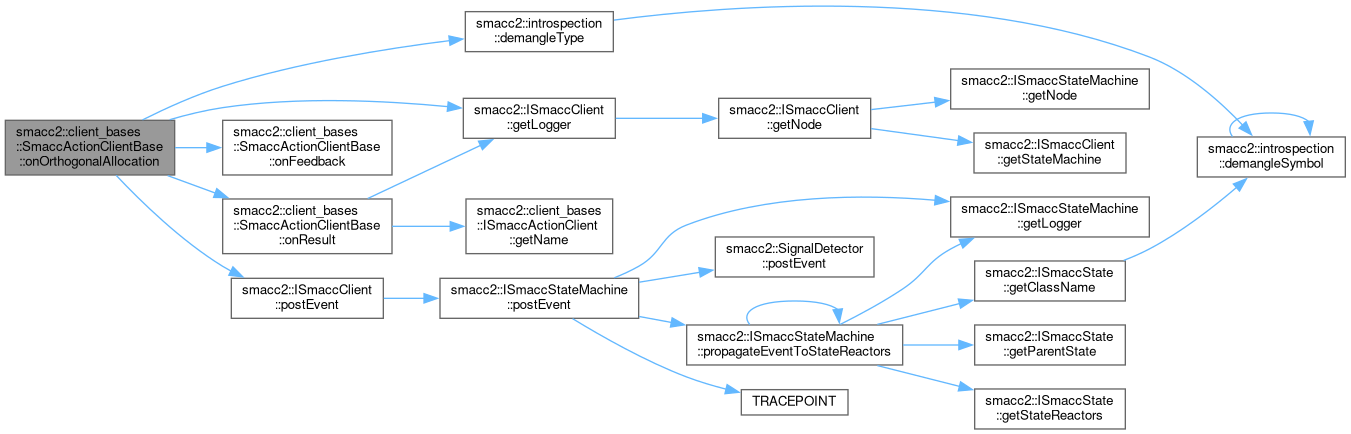
◆ onOrthogonalAllocation()
|
inline |
Definition at line 125 of file smacc_action_client_base.hpp.
References smacc2::introspection::demangleType(), smacc2::client_bases::SmaccActionClientBase< ActionType >::done_cb, smacc2::client_bases::SmaccActionClientBase< ActionType >::feedback_cb, smacc2::ISmaccClient::getLogger(), smacc2::client_bases::SmaccActionClientBase< ActionType >::onFeedback(), smacc2::client_bases::SmaccActionClientBase< ActionType >::onResult(), smacc2::client_bases::SmaccActionClientBase< ActionType >::postAbortedEvent, smacc2::client_bases::SmaccActionClientBase< ActionType >::postCancelledEvent, smacc2::ISmaccClient::postEvent(), smacc2::client_bases::SmaccActionClientBase< ActionType >::postFeedbackEvent, and smacc2::client_bases::SmaccActionClientBase< ActionType >::postSuccessEvent.
◆ onResult()
|
inlineprotected |
Definition at line 348 of file smacc_action_client_base.hpp.
References smacc2::ISmaccClient::getLogger(), smacc2::client_bases::ISmaccActionClient::getName(), smacc2::client_bases::SmaccActionClientBase< ActionType >::onAborted_, smacc2::client_bases::SmaccActionClientBase< ActionType >::onCancelled_, smacc2::client_bases::SmaccActionClientBase< ActionType >::onSucceeded_, smacc2::client_bases::SmaccActionClientBase< ActionType >::postAbortedEvent, smacc2::client_bases::SmaccActionClientBase< ActionType >::postCancelledEvent, and smacc2::client_bases::SmaccActionClientBase< ActionType >::postSuccessEvent.
Referenced by smacc2::client_bases::SmaccActionClientBase< ActionType >::onOrthogonalAllocation().


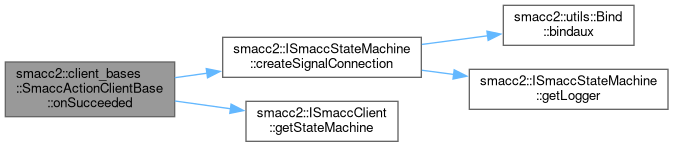
◆ onSucceeded() [1/2]
|
inline |
Definition at line 157 of file smacc_action_client_base.hpp.
References smacc2::ISmaccStateMachine::createSignalConnection(), and smacc2::ISmaccClient::getStateMachine().
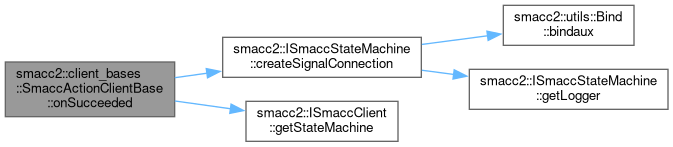
◆ onSucceeded() [2/2]
|
inline |
Definition at line 151 of file smacc_action_client_base.hpp.
References smacc2::ISmaccStateMachine::createSignalConnection(), and smacc2::ISmaccClient::getStateMachine().
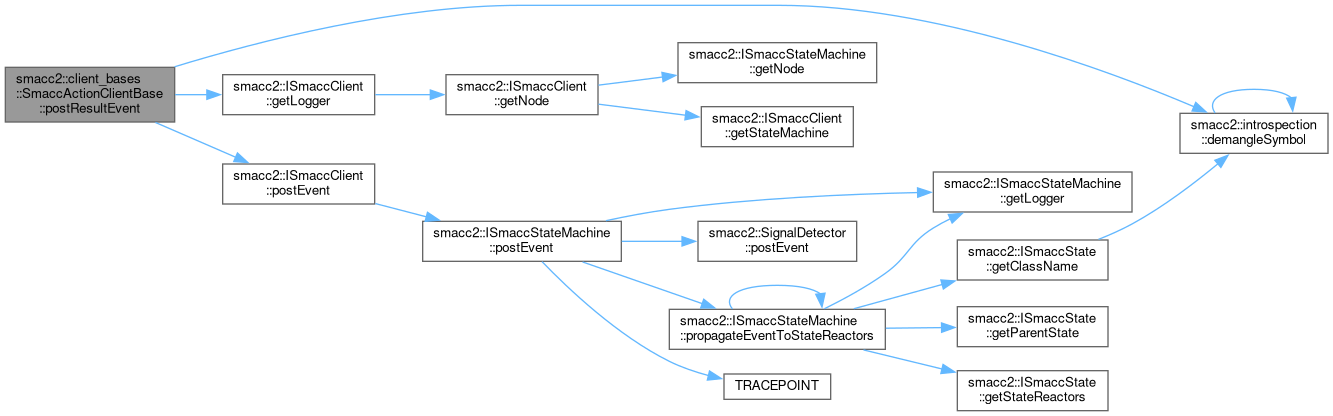
◆ postResultEvent()
|
inline |
Definition at line 114 of file smacc_action_client_base.hpp.
References smacc2::introspection::demangleSymbol(), smacc2::ISmaccClient::getLogger(), and smacc2::ISmaccClient::postEvent().
◆ sendGoal()
|
inline |
Function called whenever feedback is received for the goal.
Function called when the result for the goal is received.
Definition at line 237 of file smacc_action_client_base.hpp.
References smacc2::client_bases::SmaccActionClientBase< ActionType >::client_, smacc2::client_bases::SmaccActionClientBase< ActionType >::done_cb, smacc2::client_bases::SmaccActionClientBase< ActionType >::feedback_cb, smacc2::ISmaccClient::getLogger(), smacc2::client_bases::ISmaccActionClient::getName(), smacc2::client_bases::SmaccActionClientBase< ActionType >::goalHandle_, and smacc2::client_bases::SmaccActionClientBase< ActionType >::lastRequest_.

Member Data Documentation
◆ action_endpoint_
| std::string smacc2::client_bases::SmaccActionClientBase< ActionType >::action_endpoint_ |
Definition at line 63 of file smacc_action_client_base.hpp.
Referenced by smacc2::client_bases::SmaccActionClientBase< ActionType >::onInitialize(), and smacc2::client_bases::SmaccActionClientBase< ActionType >::SmaccActionClientBase().
◆ client_
|
protected |
Definition at line 339 of file smacc_action_client_base.hpp.
Referenced by smacc2::client_bases::SmaccActionClientBase< ActionType >::cancelGoal(), smacc2::client_bases::SmaccActionClientBase< ActionType >::getClientBase(), smacc2::client_bases::SmaccActionClientBase< ActionType >::onInitialize(), and smacc2::client_bases::SmaccActionClientBase< ActionType >::sendGoal().
◆ done_cb
| ResultCallback smacc2::client_bases::SmaccActionClientBase< ActionType >::done_cb |
Definition at line 109 of file smacc_action_client_base.hpp.
Referenced by smacc2::client_bases::SmaccActionClientBase< ActionType >::onOrthogonalAllocation(), and smacc2::client_bases::SmaccActionClientBase< ActionType >::sendGoal().
◆ feedback_cb
| FeedbackCallback smacc2::client_bases::SmaccActionClientBase< ActionType >::feedback_cb |
Definition at line 111 of file smacc_action_client_base.hpp.
Referenced by smacc2::client_bases::SmaccActionClientBase< ActionType >::onOrthogonalAllocation(), and smacc2::client_bases::SmaccActionClientBase< ActionType >::sendGoal().
◆ goalHandle_
| GoalHandle::SharedPtr smacc2::client_bases::SmaccActionClientBase< ActionType >::goalHandle_ |
Definition at line 92 of file smacc_action_client_base.hpp.
Referenced by smacc2::client_bases::SmaccActionClientBase< ActionType >::sendGoal().
◆ lastRequest_
| std::optional<std::shared_future<typename GoalHandle::SharedPtr> > smacc2::client_bases::SmaccActionClientBase< ActionType >::lastRequest_ |
Definition at line 91 of file smacc_action_client_base.hpp.
Referenced by smacc2::client_bases::SmaccActionClientBase< ActionType >::cancelGoal(), and smacc2::client_bases::SmaccActionClientBase< ActionType >::sendGoal().
◆ onAborted_
| smacc2::SmaccSignal<void(const WrappedResult &)> smacc2::client_bases::SmaccActionClientBase< ActionType >::onAborted_ |
Definition at line 95 of file smacc_action_client_base.hpp.
Referenced by smacc2::client_bases::SmaccActionClientBase< ActionType >::onResult().
◆ onCancelled_
| smacc2::SmaccSignal<void(const WrappedResult &)> smacc2::client_bases::SmaccActionClientBase< ActionType >::onCancelled_ |
Definition at line 98 of file smacc_action_client_base.hpp.
Referenced by smacc2::client_bases::SmaccActionClientBase< ActionType >::onResult().
◆ onSucceeded_
| smacc2::SmaccSignal<void(const WrappedResult &)> smacc2::client_bases::SmaccActionClientBase< ActionType >::onSucceeded_ |
Definition at line 94 of file smacc_action_client_base.hpp.
Referenced by smacc2::client_bases::SmaccActionClientBase< ActionType >::onResult().
◆ postAbortedEvent
| std::function<void(WrappedResult)> smacc2::client_bases::SmaccActionClientBase< ActionType >::postAbortedEvent |
Definition at line 102 of file smacc_action_client_base.hpp.
Referenced by smacc2::client_bases::SmaccActionClientBase< ActionType >::onOrthogonalAllocation(), and smacc2::client_bases::SmaccActionClientBase< ActionType >::onResult().
◆ postCancelledEvent
| std::function<void(WrappedResult)> smacc2::client_bases::SmaccActionClientBase< ActionType >::postCancelledEvent |
Definition at line 105 of file smacc_action_client_base.hpp.
Referenced by smacc2::client_bases::SmaccActionClientBase< ActionType >::onOrthogonalAllocation(), and smacc2::client_bases::SmaccActionClientBase< ActionType >::onResult().
◆ postFeedbackEvent
| std::function<void(const Feedback &)> smacc2::client_bases::SmaccActionClientBase< ActionType >::postFeedbackEvent |
Definition at line 107 of file smacc_action_client_base.hpp.
Referenced by smacc2::client_bases::SmaccActionClientBase< ActionType >::onFeedback(), and smacc2::client_bases::SmaccActionClientBase< ActionType >::onOrthogonalAllocation().
◆ postSuccessEvent
| std::function<void(WrappedResult)> smacc2::client_bases::SmaccActionClientBase< ActionType >::postSuccessEvent |
Definition at line 101 of file smacc_action_client_base.hpp.
Referenced by smacc2::client_bases::SmaccActionClientBase< ActionType >::onOrthogonalAllocation(), and smacc2::client_bases::SmaccActionClientBase< ActionType >::onResult().
The documentation for this class was generated from the following file:
- smacc2/include/smacc2/client_bases/smacc_action_client_base.hpp