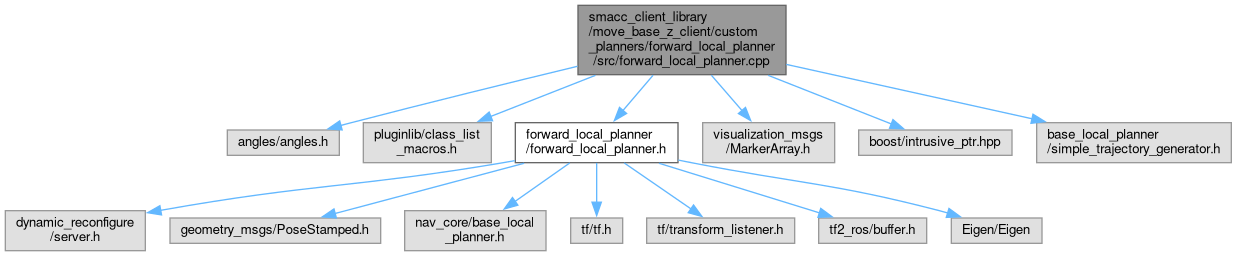
#include <angles/angles.h>#include <pluginlib/class_list_macros.h>#include <forward_local_planner/forward_local_planner.h>#include <visualization_msgs/MarkerArray.h>#include <boost/intrusive_ptr.hpp>#include <base_local_planner/simple_trajectory_generator.h>
Include dependency graph for forward_local_planner.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | cl_move_base_z |
| namespace | cl_move_base_z::forward_local_planner |
Functions | |
| tf::Stamped< tf::Pose > | cl_move_base_z::forward_local_planner::optionalRobotPose (costmap_2d::Costmap2DROS *costmapRos) |
| void | cl_move_base_z::forward_local_planner::clamp (geometry_msgs::Twist &cmd_vel, double max_linear_x_speed_, double max_angular_z_speed_) |