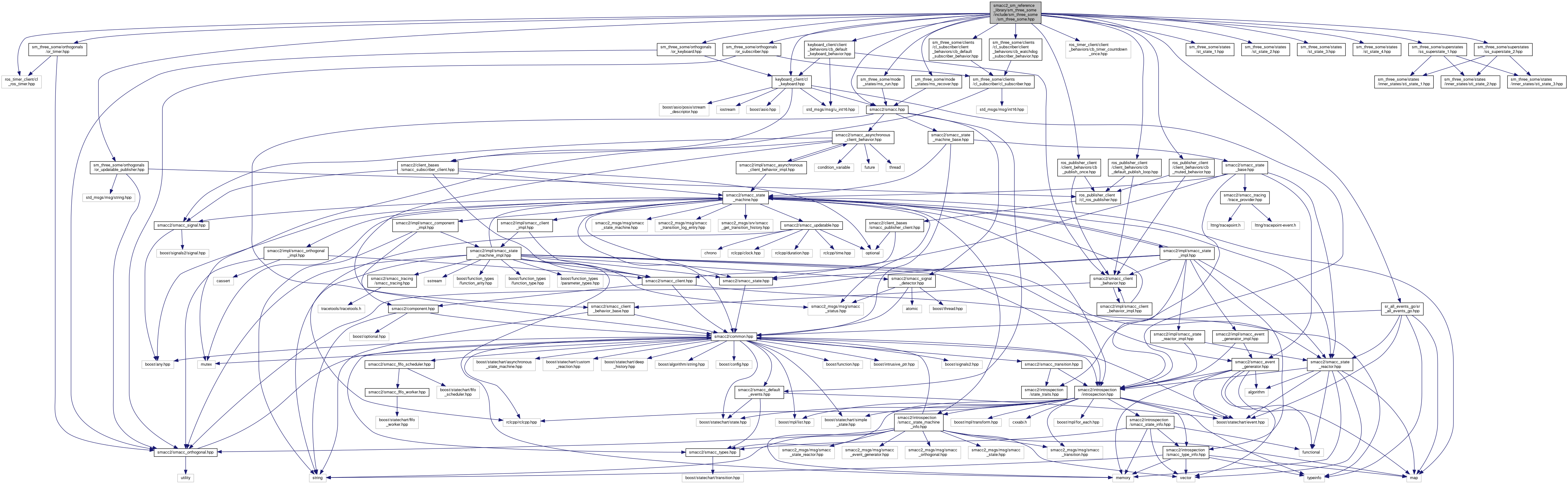
#include <smacc2/smacc.hpp>#include <keyboard_client/cl_keyboard.hpp>#include <ros_timer_client/cl_ros_timer.hpp>#include <sm_three_some/orthogonals/or_keyboard.hpp>#include <sm_three_some/orthogonals/or_subscriber.hpp>#include <sm_three_some/orthogonals/or_timer.hpp>#include <sm_three_some/orthogonals/or_updatable_publisher.hpp>#include <keyboard_client/client_behaviors/cb_default_keyboard_behavior.hpp>#include <ros_publisher_client/client_behaviors/cb_default_publish_loop.hpp>#include <ros_publisher_client/client_behaviors/cb_muted_behavior.hpp>#include <ros_publisher_client/client_behaviors/cb_publish_once.hpp>#include <sm_three_some/clients/cl_subscriber/client_behaviors/cb_default_subscriber_behavior.hpp>#include <sm_three_some/clients/cl_subscriber/client_behaviors/cb_watchdog_subscriber_behavior.hpp>#include <ros_timer_client/client_behaviors/cb_timer_countdown_once.hpp>#include <sr_all_events_go/sr_all_events_go.hpp>#include <sm_three_some/mode_states/ms_run.hpp>#include <sm_three_some/mode_states/ms_recover.hpp>#include <sm_three_some/states/st_state_1.hpp>#include <sm_three_some/states/st_state_2.hpp>#include <sm_three_some/states/st_state_3.hpp>#include <sm_three_some/states/st_state_4.hpp>#include <sm_three_some/superstates/ss_superstate_1.hpp>#include <sm_three_some/superstates/ss_superstate_2.hpp>
Include dependency graph for sm_three_some.hpp:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | sm_three_some::EvToDeep |
| struct | sm_three_some::EvFail |
| struct | sm_three_some::SmThreeSome |
Namespaces | |
| namespace | sm_three_some |
| namespace | sm_three_some::SS1 |
| namespace | sm_three_some::SS2 |