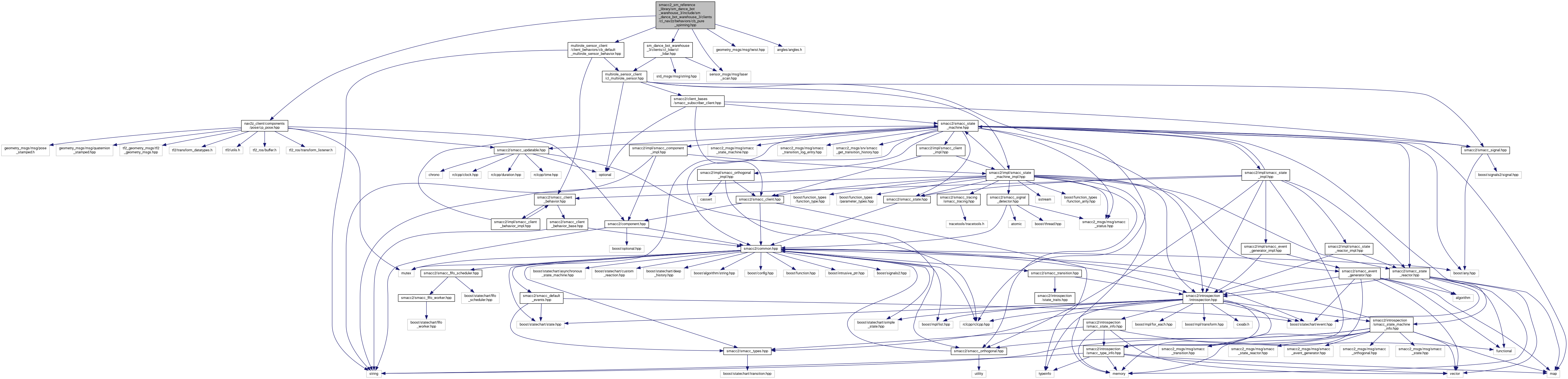
#include <multirole_sensor_client/client_behaviors/cb_default_multirole_sensor_behavior.hpp>#include <sensor_msgs/msg/laser_scan.hpp>#include <sm_dance_bot_warehouse_3/clients/cl_lidar/cl_lidar.hpp>#include <geometry_msgs/msg/twist.hpp>#include <nav2z_client/components/pose/cp_pose.hpp>#include <angles/angles.h>
Include dependency graph for cb_pure_spinning.hpp:
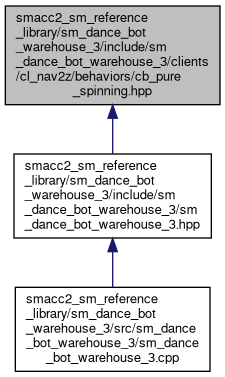
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | sm_dance_bot_warehouse_3::cl_nav2zclient::CbPureSpinning |
Namespaces | |
| namespace | sm_dance_bot_warehouse_3 |
| namespace | sm_dance_bot_warehouse_3::cl_nav2zclient |