cp_trajectory_setpoint.cpp File Reference
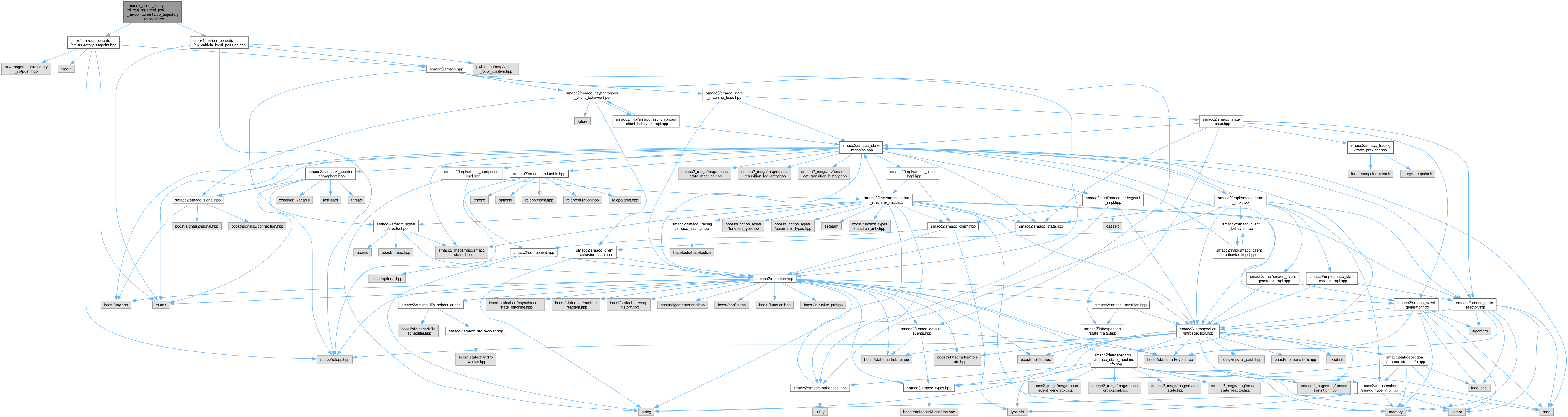
#include <cl_px4_mr/components/cp_trajectory_setpoint.hpp>#include <cl_px4_mr/components/cp_vehicle_local_position.hpp>
Include dependency graph for cp_trajectory_setpoint.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | cl_px4_mr |
Generated by