cb_wait_nav2_nodes.cpp File Reference
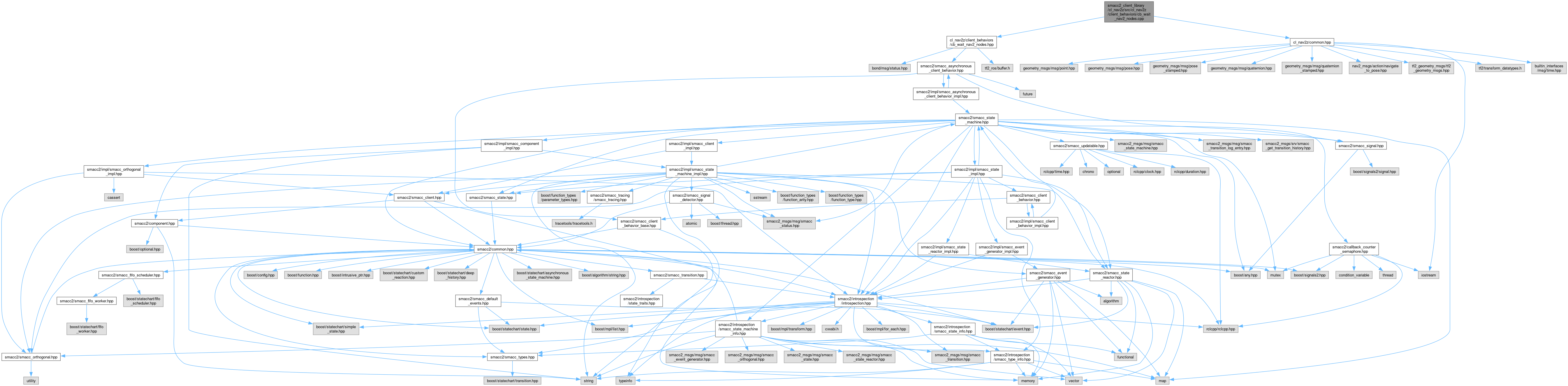
Include dependency graph for cb_wait_nav2_nodes.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | cl_nav2z |
Functions | |
| std::string | cl_nav2z::toString (Nav2Nodes value) |
| Nav2Nodes | cl_nav2z::fromString (std::string str) |
Generated by