cb_move_end_effector_trajectory.hpp File Reference
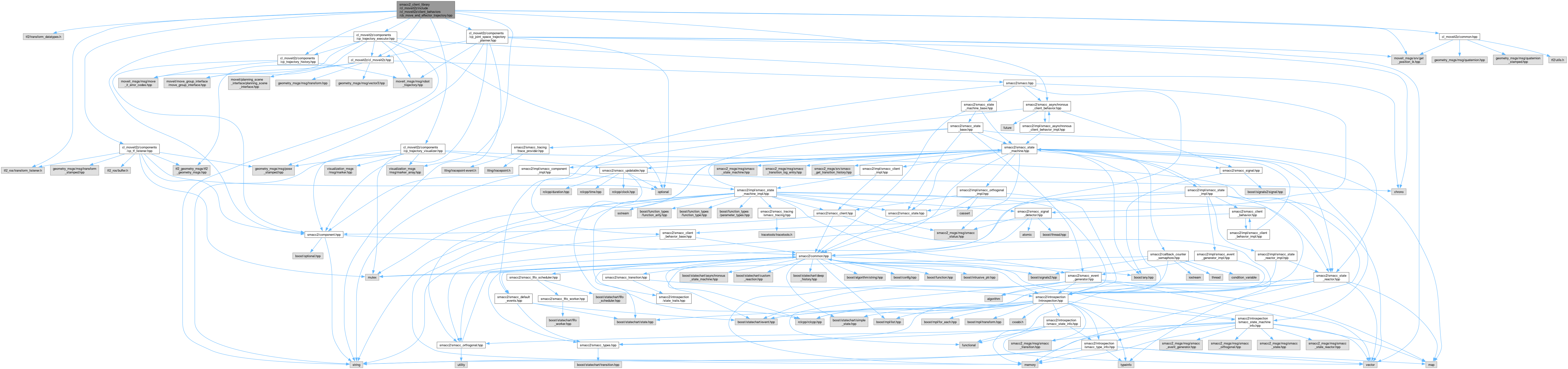
#include <tf2/transform_datatypes.h>#include <tf2_ros/transform_listener.h>#include <cl_moveit2z/cl_moveit2z.hpp>#include <cl_moveit2z/common.hpp>#include <cl_moveit2z/components/cp_joint_space_trajectory_planner.hpp>#include <cl_moveit2z/components/cp_move_group_interface.hpp>#include <cl_moveit2z/components/cp_tf_listener.hpp>#include <cl_moveit2z/components/cp_trajectory_executor.hpp>#include <cl_moveit2z/components/cp_trajectory_history.hpp>#include <cl_moveit2z/components/cp_trajectory_visualizer.hpp>#include <moveit_msgs/srv/get_position_ik.hpp>#include <smacc2/smacc_asynchronous_client_behavior.hpp>#include <visualization_msgs/msg/marker_array.hpp>
Include dependency graph for cb_move_end_effector_trajectory.hpp:
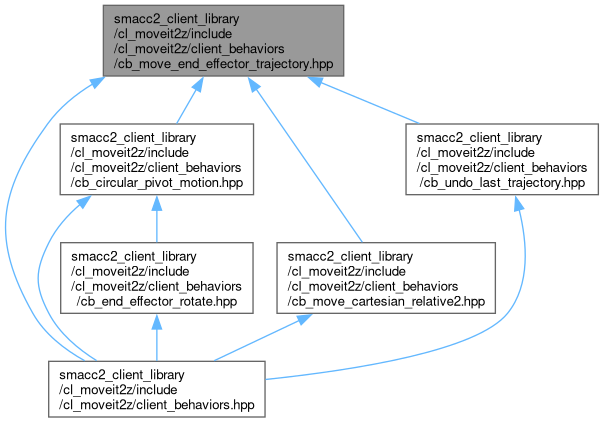
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | cl_moveit2z::EvJointDiscontinuity< AsyncCB, Orthogonal > |
| struct | cl_moveit2z::EvIncorrectInitialPosition< AsyncCB, Orthogonal > |
| class | cl_moveit2z::CbMoveEndEffectorTrajectory |
Namespaces | |
| namespace | cl_moveit2z |
Enumerations | |
| enum class | cl_moveit2z::ComputeJointTrajectoryErrorCode { cl_moveit2z::SUCCESS , cl_moveit2z::INCORRECT_INITIAL_STATE , cl_moveit2z::JOINT_TRAJECTORY_DISCONTINUITY } |
Generated by