client_behaviors.hpp File Reference
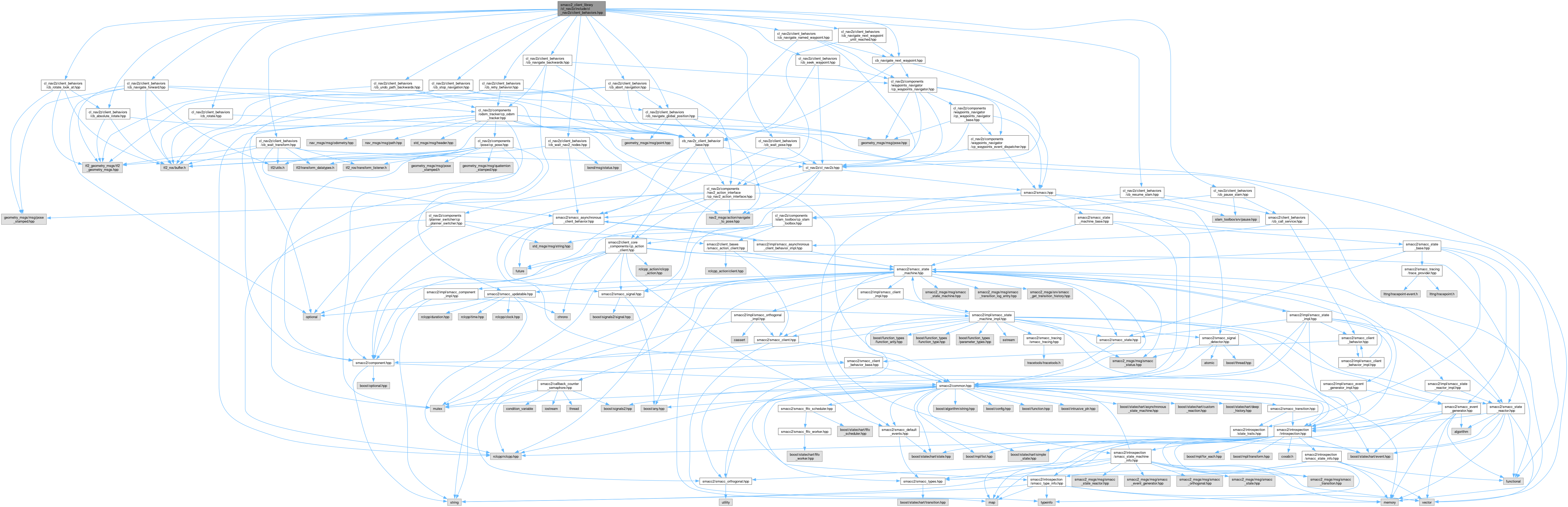
#include <cl_nav2z/client_behaviors/cb_absolute_rotate.hpp>#include <cl_nav2z/client_behaviors/cb_rotate.hpp>#include <cl_nav2z/client_behaviors/cb_rotate_look_at.hpp>#include <cl_nav2z/client_behaviors/cb_navigate_backwards.hpp>#include <cl_nav2z/client_behaviors/cb_navigate_forward.hpp>#include <cl_nav2z/client_behaviors/cb_navigate_global_position.hpp>#include <cl_nav2z/client_behaviors/cb_retry_behavior.hpp>#include <cl_nav2z/client_behaviors/cb_undo_path_backwards.hpp>#include <cl_nav2z/client_behaviors/cb_wait_nav2_nodes.hpp>#include <cl_nav2z/client_behaviors/cb_wait_pose.hpp>#include <cl_nav2z/client_behaviors/cb_wait_transform.hpp>#include <cl_nav2z/client_behaviors/cb_abort_navigation.hpp>#include <cl_nav2z/client_behaviors/cb_stop_navigation.hpp>#include <cl_nav2z/client_behaviors/cb_navigate_named_waypoint.hpp>#include <cl_nav2z/client_behaviors/cb_navigate_next_waypoint.hpp>#include <cl_nav2z/client_behaviors/cb_navigate_next_waypoint_until_reached.hpp>#include <cl_nav2z/client_behaviors/cb_seek_waypoint.hpp>#include <cl_nav2z/client_behaviors/cb_pause_slam.hpp>#include <cl_nav2z/client_behaviors/cb_resume_slam.hpp>
Include dependency graph for client_behaviors.hpp:
Generated by