cb_save_slam_map.hpp File Reference
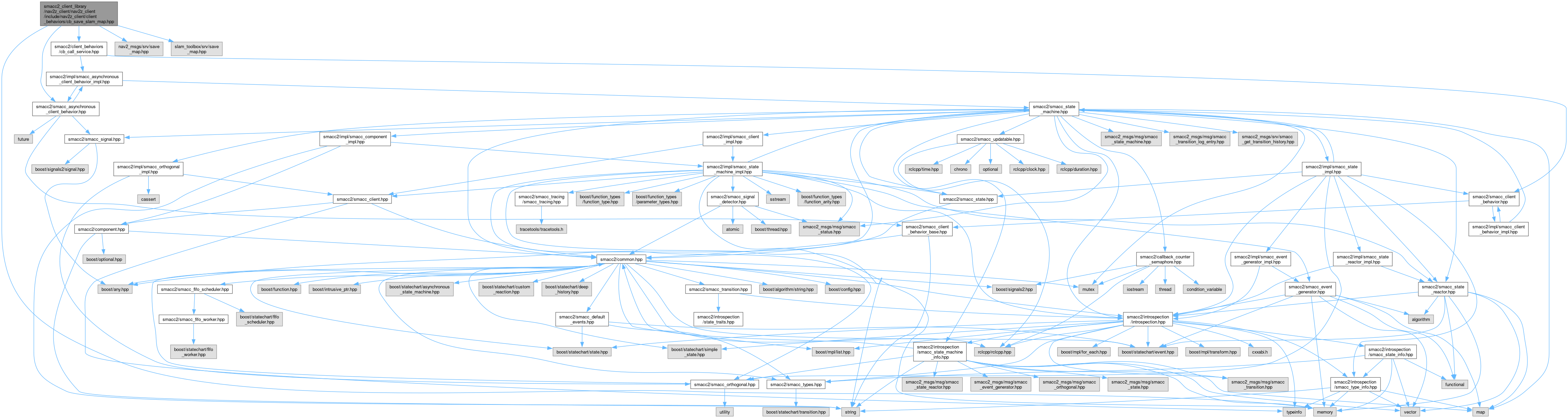
#include <memory>#include <nav2_msgs/srv/save_map.hpp>#include <slam_toolbox/srv/save_map.hpp>#include <smacc2/client_behaviors/cb_call_service.hpp>#include <smacc2/smacc_asynchronous_client_behavior.hpp>
Include dependency graph for cb_save_slam_map.hpp:
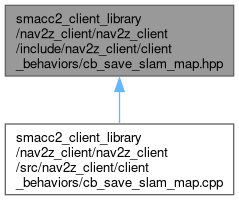
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | cl_nav2z::CbSaveSlamMap |
Namespaces | |
| namespace | cl_nav2z |
Typedefs | |
| template<typename TService > | |
| using | cl_nav2z::CbServiceCall = smacc2::client_behaviors::CbServiceCall<TService> |
Generated by