cb_save_slam_map.cpp File Reference
#include <angles/angles.h>#include <chrono>#include <geometry_msgs/msg/twist.hpp>#include <memory>#include <nav2_msgs/srv/save_map.hpp>#include <nav2z_client/client_behaviors/cb_save_slam_map.hpp>#include <nav2z_client/components/pose/cp_pose.hpp>#include <slam_toolbox/srv/save_map.hpp>#include <smacc2/client_behaviors/cb_call_service.hpp>#include <smacc2/smacc_asynchronous_client_behavior.hpp>#include <std_msgs/msg/string.hpp>
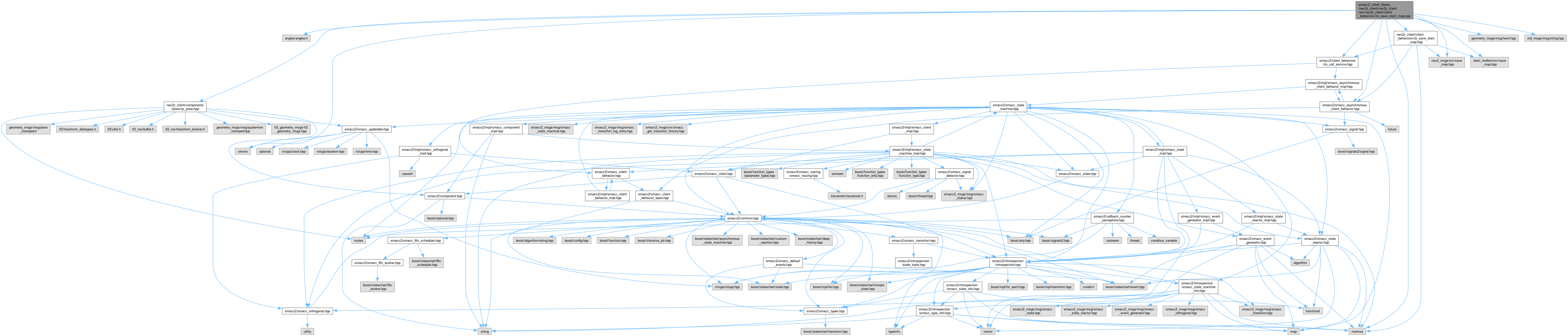
Include dependency graph for cb_save_slam_map.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | cl_nav2z |
Generated by