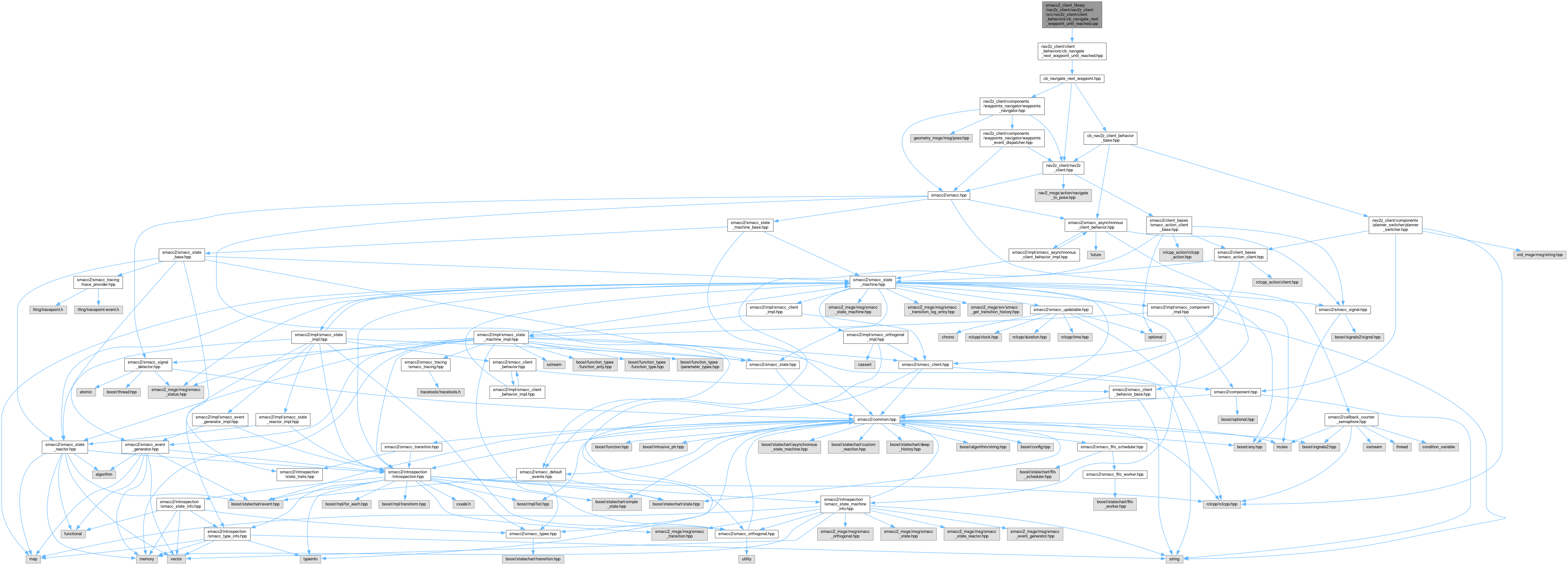
#include <nav2z_client/client_behaviors/cb_navigate_next_waypoint_until_reached.hpp>
Go to the source code of this file.