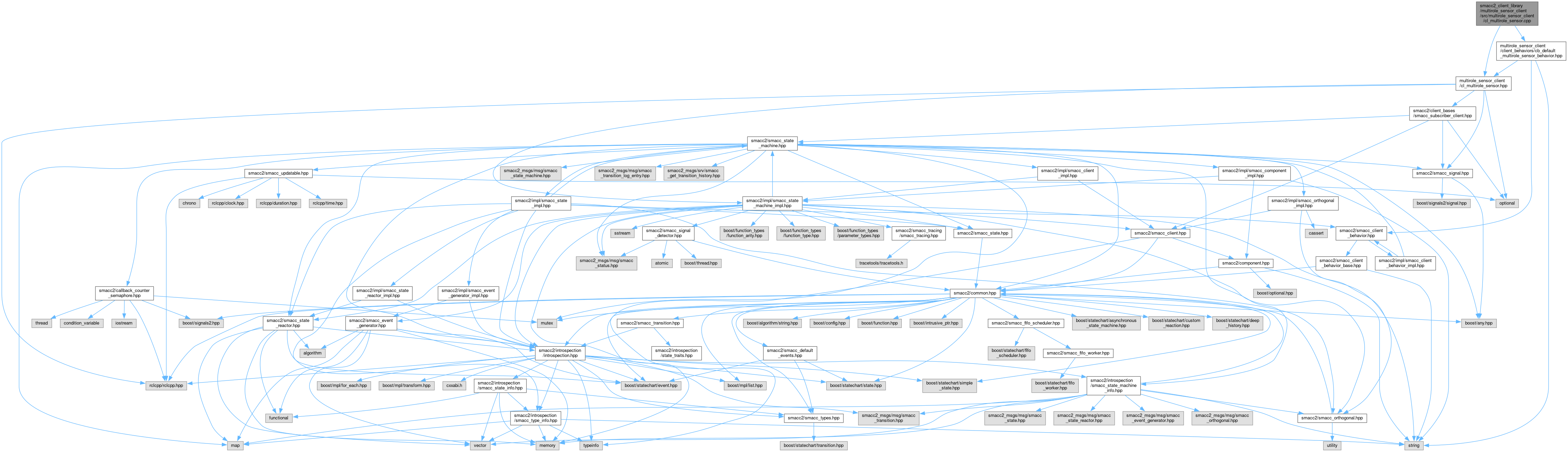
#include <multirole_sensor_client/cl_multirole_sensor.hpp>#include <multirole_sensor_client/client_behaviors/cb_default_multirole_sensor_behavior.hpp>
Include dependency graph for cl_multirole_sensor.cpp:
|
SMACC2
|
#include <multirole_sensor_client/cl_multirole_sensor.hpp>#include <multirole_sensor_client/client_behaviors/cb_default_multirole_sensor_behavior.hpp>